(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЯГОВОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА
тор, асинхронные двигатели, подключенные к выходу генератора через статические преобразователи частоты, датчики тока в цепи преобразовате лей частоты, выходы которых соединены со входами логического элемента выделения максимального сигнала подключенного к управляющему входу рёгулйтора возбуждения генератора, последовательно соединенные усилитель. задающий генератор и блок управления преобразователем частоты, датчики магнитного потока двигателей и датчики опорного сигнала, каждый из которых соединен со входом второго логического элемента выделения максимального сигнала, выходом соединен.ный со входом блока сравнения, второй вход которого соединен с выходом датчика тока-, датчики скорости двигателей, введены сумматор, блок смещения и логический элемент выделения минимального сигнала, входы которого соединены с датчиками скорости, а выход - со входом сумматора, другой вход которого соединен с блоком смещения, а третий вход - с выходом блока сравнения, выход упомянутого сумматора соединен со входом усилителя.
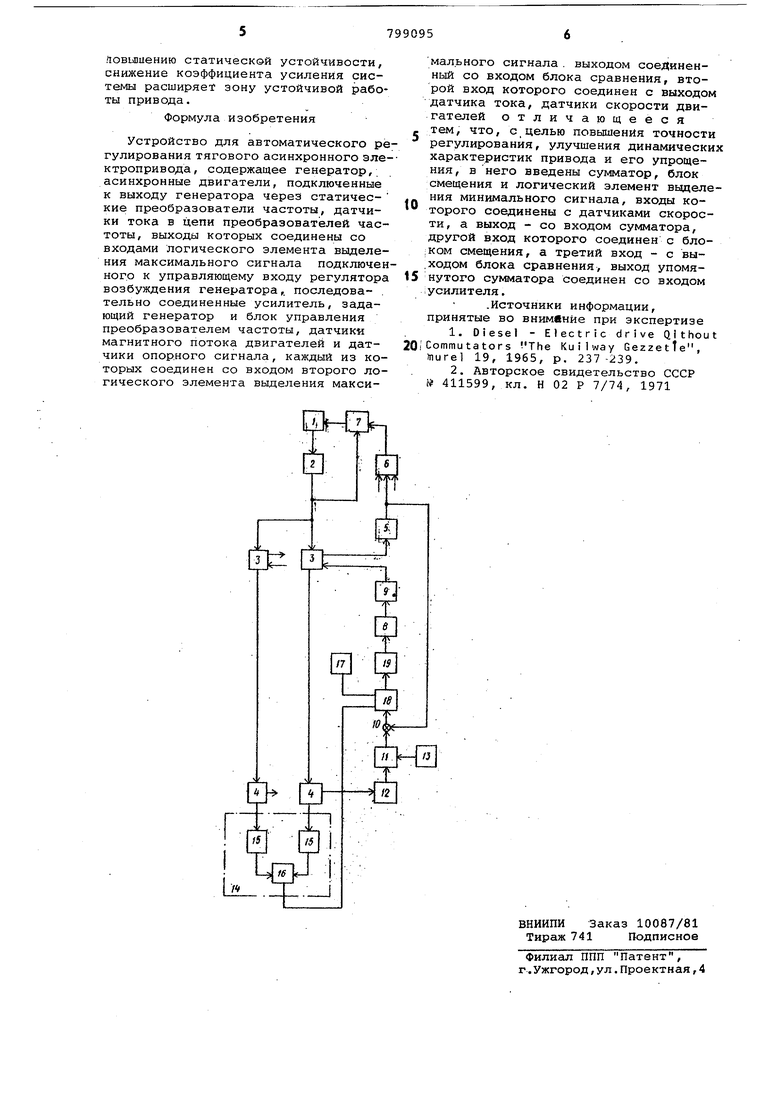
На чертеже представлена блок-схема предлагаемого устройства.
Генератор 1 через выпрямитель 2 и инверторы 3 питает асинхронные двигатели 4. Токи тягoв JX двигателей измеряются датчиками 5 тока, выходные сигналы которых подаются на вход логического элемента б выделения максимального сигнала. Сигнал, пропорциональный току наиболее нагруженного двигателя, поступает на вход регулятора 7 возбуждения, который формирует семейство требуемых внешних характеристик силового блока 1-3
Для управления каждым преобразователем частоты используются задаю.щий генератор 8 и блок 9 управления. Сигнал рассогласования вырабатывается, блоком 10 сравнения, на входы которого поданы сигнал по току данного двигателя, сигнал, снимаемый с выхода второго логического элемента 11 вьвделения максимального сигнала, на входы которого поступают сигнал, вырабатываемый датчиком магнитного потока; двигателя 12, датчик 13 опорного сигналаi Формирователь регулирующего воздействия включает в себя блок 14, обратной связи по скорости, состоящий, по меньшей мере, их двух датчиков 15 скорости-и логического элемента 16 минимального сигнала, блока 17 смещения/ а также, суммато-г ра 18.
На выходе .сумматора 18 формируется управляющее воздействие, представляющее собой сумму сигналов, снимаемых с блоков 16 и 17, из которой вычтен сигнал рассогласования, вырабатываемый блоком 10.
Сигнал.управляющего воздействия от усилителя 19, подан на вход задающего генератора 8.
Устройство реализует во всем диапазоне изменения скорости движения три закона регулирования
1 - Ф , Л const
1 ,
РТ const :,Eu, Р const ,
где 3 -. ф
и
соответственно действующие значения первых гармонических тока, магнитного потока и напряжение тягового двигателя-,
р. мощность, подведенная к двигателю.
Устройство работает следующим образом. .
В случае отсутствия сигналов обратной связи (т. е. перед пуском или в режиме выбега) частота инвертора в всемдиапазоне скоростей имеет постоянное превышение над приведенной частотой вращения ротора, определяемое величиной постоянного сигнала на.выходе блока 17 смещения. При включении системы после выбега или при пуске устройство отрабатывает уменьшение частоты до требуемого значения при данной скорости за счет появления сигнала рассогласования на выходе блока 10 сравнения. Погрешность регулирования и время реагирования системы после включения определяются величиной постоянного сигнала блока 17 смещения, величина которого может быть выбрана достаточно малой и не зависит от диапазона изменения частоты системы. Время реагирования системы после включения, кроме этого, зависит от постоянной времени усилителя 19, выполняющего роль последовательного корректирующего звена. Наличие нескольких датчиков 15 скорости, а также инерционность предварительного усилителя 19 повышают пробуксовочные свойства локомотива, позволяя в динамических режимах использовать естественные жесткие механические характеристики асинхронного двигателя.
Введение в систему регулирования частоты компенсации по скорости и задатчика постоянного смещения дало возможность существенно упростить устройство .регулирования за счет устранения блока слежения за скоростью
и исключить возможность перехода тягового дв-игателя .в . режим генераторного торможения при включении электропередачи после выбега за счет компенсации возможной отрицательной погрешности реальньцс.датчиков, скорости, а так же снизить величину рассогласования системы., что приводит к уменьшению статизма.и, соответственно, к
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2011 |
|
RU2476332C1 |
| Система автоматического регулирования синхронного генератора частотно-управляемого тягового электропривода | 1975 |
|
SU861130A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1418882A1 |
| Способ регулирования электрической тяговой передачи тепловоза | 2020 |
|
RU2735305C1 |
| Газотурбовоз с передачей переменнопеременного тока | 1977 |
|
SU686918A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2008 |
|
RU2366583C1 |
| УСТРОЙСТВО АВАРИЙНОГО ОХЛАЖДЕНИЯ РЕАКТОРНОЙ УСТАНОВКИ ПРИ ЕЕ ОБЕСТОЧИВАНИИ | 2013 |
|
RU2539862C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2000 |
|
RU2174919C1 |
| Устройство для регулирования возбуждения тягового генератора тепловоза | 1983 |
|
SU1158395A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
