Система работает следующим образом.
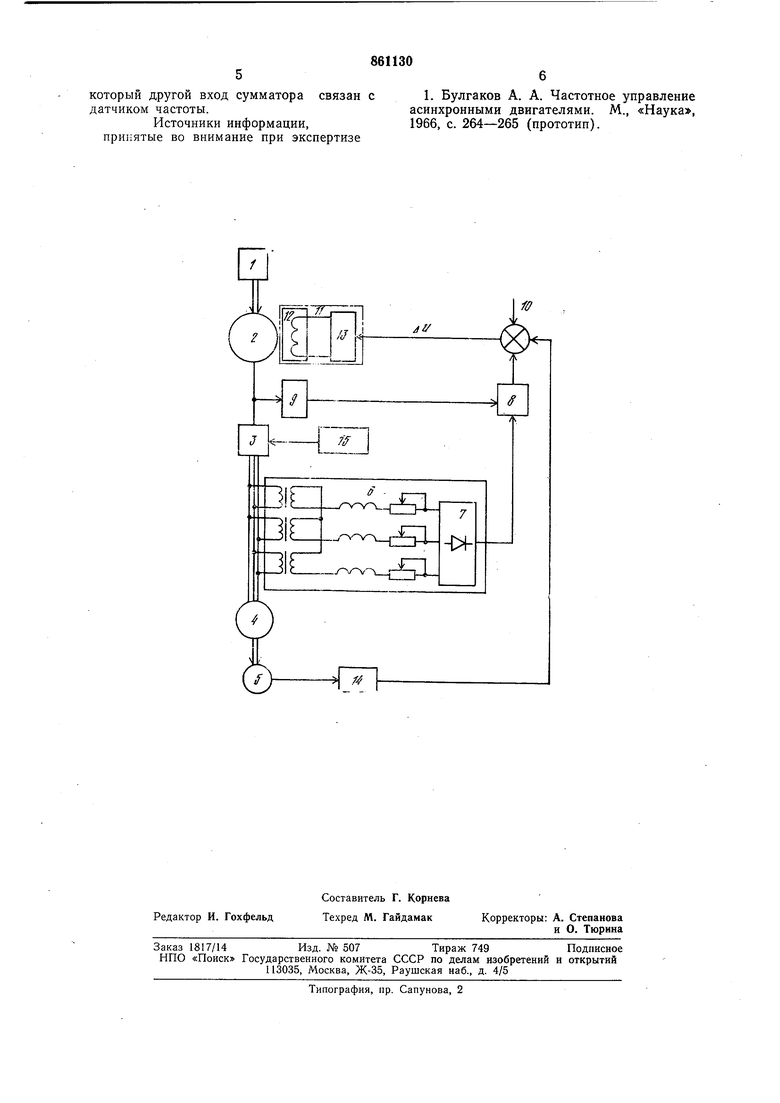
Сигнал, пропорциональный выходному напряжепию сйнхроиного генератора 2, снимаемый с датчика 9 напряжения, и сигнал, снимаемый со статического аналога 6 асинхронного двигателя, поступают на блок 8 выделения максимального сигнала, сравниваются и больший из них проходит на вход сумматора 10, которьш сравнивает этот сигнал с заданным. Если указанный максимальный сигнал отличается от заданного значения, то разность сигналов увеличивается усилителем 13 и подается на обмотку 12 возбуждения. Напряжение синхронного генератора 2 изменяется до тех пор, пока эта разность не станет равной нулю.
На пусковых частотах в тяговом асинхронном приводе с частотным управлением момент поддерживается постоянным, поэтому в качестве датчика потока используется статический аналог 6 асинхронного двигателя, выполненный, например, в виде однофазных трансформаторов, первичная обмотка каждого из которых подключена к соответствуюндей- фазе двигателя, а вторичные обмотки соединены в «звезду и подключены через последовательно соединенные цепочки дроссель-сопротивление к выпрямителю 7. На пусковых частотах как в асинхронном двигателе, так и в его аналоге, доля падения напряжения на индуктивных сопротивлениях приближается к нулю, а доля падения напряжения на активных сопротивлениях возрастает.. Поэтому как для асинхронного двигателя, так и для его аналога необходимо на пусковых частотах завысить напряжение ннтания для компенсации падения напряжения на активных сопротивлениях для того, чтобы выходной параметр (момент для асинхронного двигателя и напряжение для его аналога) оставался постоянным.
С увеличением частоты доля падения напряжения на активном сопротивлении падает, а доля падения напряжения на индивидуальном сопротивлепии растет, поэтому па частотах от 0,3-0,4 fm до /щ выходное напряжение генератора () будет изменяться но закону t/i//i const. С увеличением частоты растет выходное нанряженне сиихронного генератора 2 и сигнал обратной связи по напрялСению, а при номинальной частоте сигнал становится равным сигналу, поступающему с аналога 6. При дальнейшем увеличении частоты блок 8 выделения максимального сигнала пропускает сигнал с датчика 9 напряжения, так как он будет больше сигнала, поступающего с аналога 6 асинхронного двигателя. Таким образом, в диапазоне частот .макс напряжение сиихронного генератора 2 формируется сигналом от датчика 9 напряжения и сигналом обратной связи по частоте вращения ротора, который сиимается с датчика 5 частоты вращения ротора и заводится на вход функционального преобразователя 5, который преобразует его таким образом, что до частоты /i fiii, on равен нулю, а выше этой частоты линейно расS тет.
С функционального преобразователя 14 сигнал обратной связи, пропорциоиальный частоте вращения ротора (f/w), поступает на еумматор 10. На частотах выше иоми10 нальной сумматор 10 производит алгебраическое сложение трех сигиалов: отрицательной обратной связи по напряжению Uocn, пололштельной обратной связи по частоте вращения ротора U., и задающего
сигнала f/зад.
зад +
Нз выражения видно, что с увеличением частоты вращения ротора f/c будет увеличиваться рассогласование сигналов, следовательно, будет увеличиваться ток возбуждения синхронного генератора 2, что приведет к увеличению напряжения.
Предложенная система позволяет сформировать выходное напряжение синхронного генератора, изменяющегося в диапазопе заданных частот согласно нредлагаемому закону. Частичные характеристики выходного напряжения синхронного генератора
0 формируются с помощью задающего сигнала зад- Система автоматического регулирования синхронного генератора частотноуправляемого тягового электропривода позволяет обеспечить регулирование напряжения на тяговом асинхронном двигателе по оптимальному закону во всем диапазоне рабочих частот, что улучшает динамику пуска и энергетические показатели тягового электропривода. Использование этой си0 стены на большегрузных автомобилях с электрической трансмиссией обеспечивает экономический эффект порядка 30 т. руб. в год на одну машину.
5Формулаиз обре тения
Система автоматического регулирования синхронного генератора частотно-унравляемого тягового электропривода, содержащая тепловой двигатель, синхронный генератор,
0 к которому через преобразователь частоты подключеп асинхронный двигатель, механически связанный с датчиком частоты, статический аналог асинхронного двигателя, который через выпрямитель подключен к
5 одному из входов блока выделения максимального сигнала, второй вход которого соединен с вьгходом датчика напряжения синхронного генератора, а выход - с одним из входов сумматора, выход которого подключен к входу регулятора тока возбуждения синхронного генератора, отличающаяся тем, что, с целью повышения тяговых усилий при пуске и уменьшении массогабаритных показателей, она снабжена
функциональным преобразователем, через
который другой вход сумматора связан с датчиком частоты.
Источники информации, принятые во внимание при экспертизе
1. Булгаков А. А. Частотное управление асинхронными двигателями. М., «Наука, 1966, с. 264-265 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Устройство частотного управления асинхронным электроприводом | 2017 |
|
RU2660460C1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2010 |
|
RU2412526C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2015 |
|
RU2599529C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
У
,. J|
7
-оь
