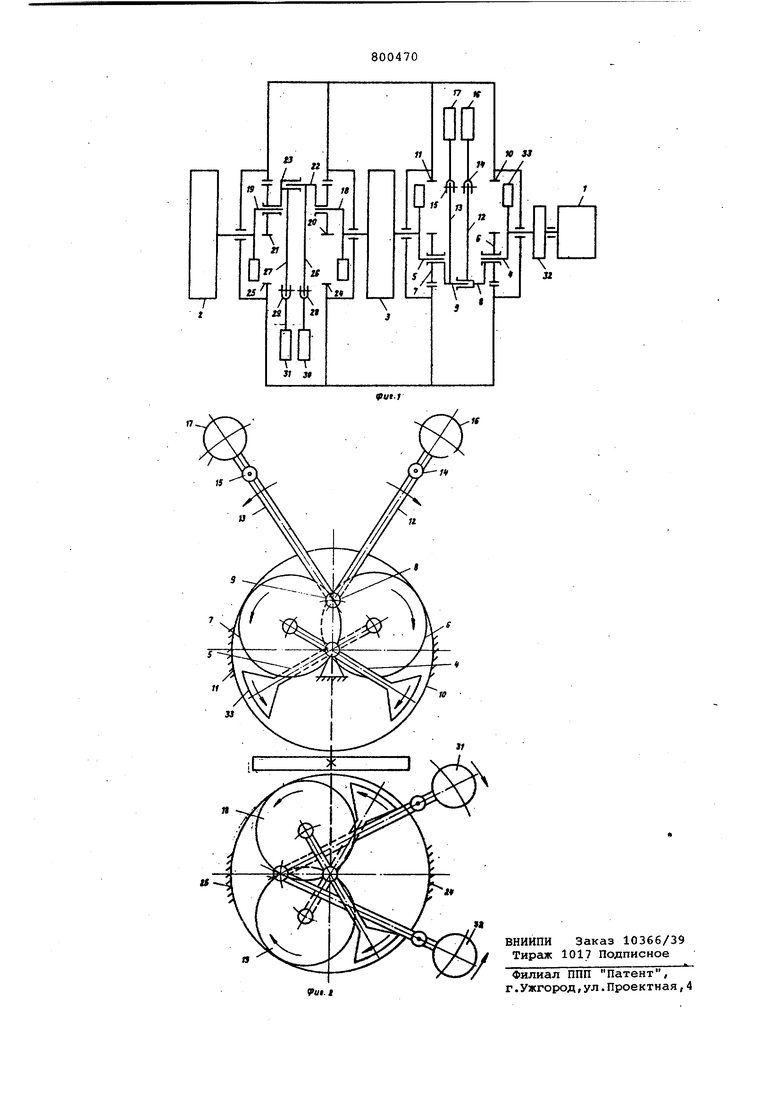
Изобретение относится к машиност роению и может быть использовано в разгонных установках. Известно устройство для разгона масс, содержащее двигатель и инерционный импульсный механизм, имеющий расходящиеся грузы, которые в п вой половине каждого цикла принудительно сводятся с помощью зубчатого механизма и гидравлического серводвигателя 13 . Недостатки этого устройства - не высокая экономичность из-за использования только половины каждого цик ла работы инерционного импульсного механизма и сложность системы управ ления этого механизма. НаибоЯее близким по технической сущности к предлагаемому является устройство для разгона масс, содержащее двигатель, маховик, смещенные по фазе движения на инерционные механизмы, выполненные каждый в вид двух рычагов с/шарнирно закрепленными на их концах грузами и планетарные передачи, включающие кгьждая водило, установленный на нем сателлит с кривошипом и неподвижный эпицикл с соотношением чисел зубьев es и сателлита 2:1 2}. в этом устройстве имеются также связанные с кривошипами сателлитов поступательно движущиеся звенья, на которых в опорах установлены рычаги инерционных механизмов, связанные с сателлитами посредством цилиндрических зубчатых передач, а водила связаны с двигателем и маховиком посредством конической зубчатой передачи . К недостаткам этого устройства относится наличие последовательно соединенных промежуточных зубчатых передач и поступательно движущихся звеньев, что снижает экономичность и надежность устройства. Цель изобретения - повышение экономичности и надежности устройства. Указанная цель достигается тем, что устройство снабжено дополнительньм маховиком, каяодая из планерных передач выполнена двухступенчатой с одинаковыми соосныш ступенями, сателлиты которых расположены симметрично относительно диаметральной оси эпицикла, кривошипы сателлитов шарнирно соединены между собой и на каждом из них закреплен один из рычагов инерционного механизма, соседние водила планетарных передач соединены с дополнительным маховиком, а к йние водила соединены одно с двигател а другое с основным маховиком. На фиг. 1 изображена кинематическая схема утсройства; на фиг. 2- пла нетарные передачи устройства в плоскости вращения их звеньев . Устройство для разгона масс содер жит двигатель 1, основной маховик 2 дополнительный маховик 3, первую дву ступенчатую планетарную передачу с водилами 4 и 5, сателлитами б и 7, на которых соответственно закреплены кривошипы 8 и 9, шарнирно связанные между собой в точке, совпадающей с пересечением делительных окружностей сателлитов, и неподвижными эпициклами 10 и 11, инерционный механиз выполненный в виде закрепленных на кривошипах 8 и 9 рычагов 12 и 13, на концах которых через шарниры 14 и 15 закреплены грузы 16 и 17, вторую двухступенчатую планетарную передачу с водилами 18 и 19, сателлитами 20 и 21, на которых соответственно закреп лены крииошипы 22 и 23,шарнирно свя занные между собой в точке, совпадаю щей с пересечением делительных окруж ностей сателлитов 20, неподвижны ми эпициклами 24 и 25, другой инерционный механизм также выполненный виде закрепленных на кривошипах 22 и 23 рычагов 26 и 27, на концах кото рых через шарниры 28 и 29 закреплен грузы 30 и 31, водило 19 соединено основным меховиком 2, водила 18 и 5 соединены с дополнительным маховико 3, а водило 6 соединено напрямую ил через муфту 32 с двигателем 1. Соот ношение чисел зубьев эпициклов и взаимодействующих с ними сателлитов равно 2:1. Грузы 16 и 17 смещены по фазе по отношению к грузам 30 и 31 на угол 90 .В планетарных передача с целью устранения динамической неуравновешенности водил, предусмотрены закрепленные на каждом из води противовесы 33. Расстояния от грузо до мест крепления рычагов на кривошипах с целью получения отклонения траектории грузов от окружности не более 5% выбраны в пять и более раз больше, чем диаметры эпициклов. Гру зы ориентированы относительно соответствующих сателлитов так,что в положениях крайних мертых точек осей кривошипов грузы расположены на линии, перпендикулярной к траектории движения оси кривошипов и пересекающей ее в мертвой точке (см фиг. 2). Устройство для разгона масс работает следующим образом. Двигатель 1 приводит во вращение водило 4. При этом оси кривошипов 8 и 9 совместно с рычагами 12 и 13 совершают возвратно-поступательное и одновременно вращательное во вза имно противоположных направлениях движения. За один оборот водила 4 оси кривошипов 8 и 9 совершают один, совпадающий по направлению, прямой и обратный ход и поворот каждого из них на 360 , но в противоположные стороны. Возникающие при вращении связанных с рычагами 12 и 13 грузов 16 и 17 центробежные силы передаются на кривошипы 8 и 9 и от них через сателлиты 6 и 7 на водила 4 и 5, создавая на них инерционные моменты, которые передаются дополнительному маховику 3 и от него через аналогично работающую вторую планетарную передачу основному маховику 2. Вращающиеся грузы 30 и 31 создают дополнительный инерционный момент, сдвинутый по фазе на 90° который суммируется с инерционным моментом создаваемым грузами 16 и 17. Под действием суммарного инерционного момента и момента от дв игателя основной маховик 2 разгоняется до требуемой скорости. Такое выполнение устройства для разгона масс позволяет сократить количество рабочих звеньев. При этом исключение из устройства поступательно двиисущихся в опорах скольжения звеньев и промежуточных зубчатых передач позволяет повысить коэффициет полезного действия устройства и, следовательно, повысить его экономичность и надежность. формула изобретения Устройство для разгона масс, содержащее двигатель, маховик, смещенные по фазе движения на 90 инерционные механизмы, выполненные каждый в виде двух рьтчагов с шарнирно закрепленными на их концах: грузами, и планетарные передачи, включающие каждая водило, установленный на нем сателлит с кривошипом и неподвижный эпицикл с соотношением чисел зубьев его и сателлита 2:1, отличающее с я тем, что, с целью повы1яения экономичности и надежности устройства, оно снабжено дополнительным маховиком, каждая из планетарных передач выполнена двухступенчатой с одинаковыми соосными ступенями сател литы которых расположены симметрично относительно диаметральной оси эпицикла кривошипы сателлитов шарнирно соединены между собой и на каждом из них закреплен один из рычагов инерционного механизма, соседние водила планетарных передач соединены с дополнительным маховиком, а крайние водила соединены одно с двигателем, а другое - с основным маховиком. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3863510, кл. F 16 Н 33/12, 1974. 2.Авторское свидетельство СССР № 2604180/25-28, кл. F16 Н 33/12, 1978 (прототип).
l
t9
и
го
bL
л
а
a
/
/
П ft
Uf n
/злцтт
lir ГТТ-1