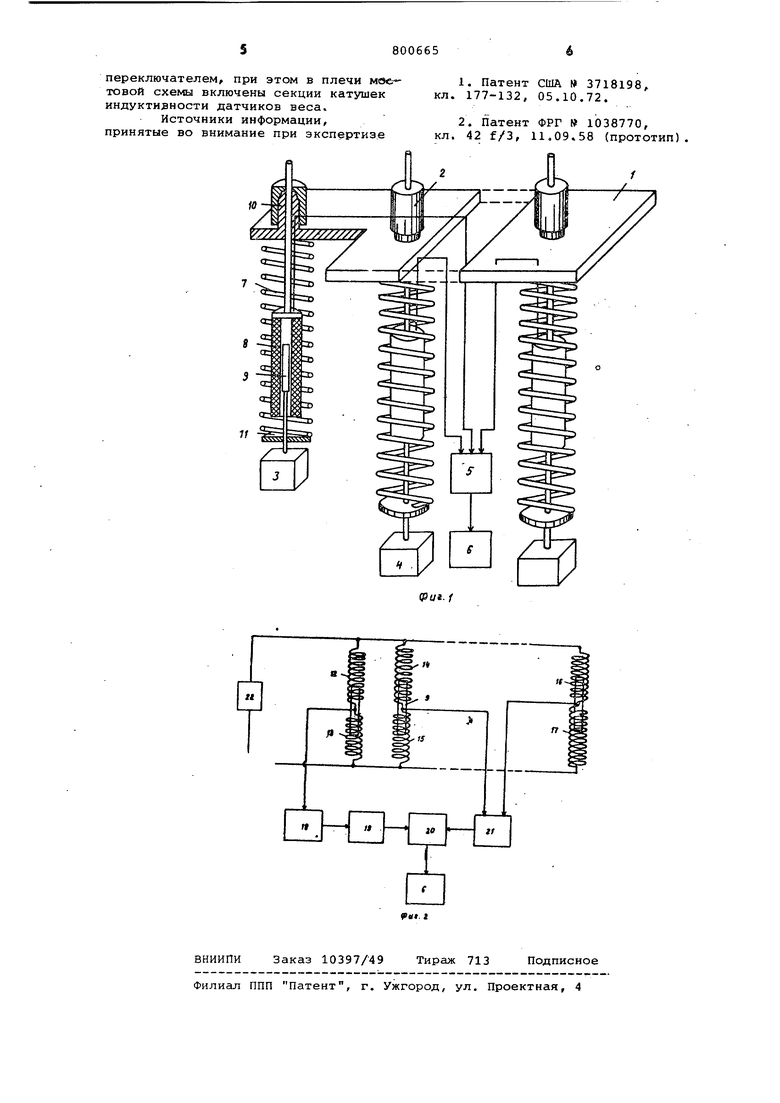
Изобретение относится к устройствам для измерения веса, а именно к измерению веса пружинньдми весами. Известны пружинные весы, содержащие основание в виде прозрачной труб ки, закрепленной на штативе, внутри которой расположен датчик веса. Регистратор перемещения весов состоит из шкалы отсчета, нанесенной на труб ке, и указателя, соединенного с нижним концом пружины 1, Однако эти весы имеют неудовлетворительную точность измерения, кото раяГ определяется точностью регистратора перемещения. Зависимость тарировочного коэффициента от параметров воздуха, в особенности от температуры, накладывает ограничения на изменение условий, в которых могут производиться измерения. Ближайшим по технической сущности к предлагаемому является устройство взвешивания, содержащее индуктивный датчик веса, через упругий элемент, связанный с основанием, и регистратор f 2 . Однако точность устройства также ограничена флуктуаыионными кслебани ми пружины как в продольном, так и в поперечном направлении, а также зависимостью тарировочногс коэффициента от параметров воздуха. изобретения - повышение измерений в широком диапазоне изменения параметров окружающей среды. Указанная цель достигается тем, дто обмотка катушки датчика веса выполнена двухсекционной, причем в устройство введены по меньшей мере два дополнительных датчика веса, один из которых снабжен грузом, равным нижнему пределу взвешивания, а другой - верхнему, и подключенный к регистратору преобразователь в виде мостовой схемы с включенными в ее измерительную диагональ последовательно соединенными инвертором, компенсатором, вычислителем и переключателем, при этом в плечи мостовой схемы включены секции катушек индуктивчссти датчиков веса. На фиг. 1 показана принципиальная схема устройства регистрации изменения веса; на фиг. 2 - электрическая схема преобразователя устройства. Предлагаемое устройство содержит основание 1, датч ки 2 веса, количество которых определяется точностью измерения и должно быть не менее трех, измерительный груз 3,.таоиоовочный груз 4, подвешенные к датчикам 2 веса, преобразователь 5, электрически связанный с регистратором
6.Датчик 2 веса состоит из пружины
7,к одному концу которой подсоединяются грузы и испытуемые образцы, катушки 8 индуктивности с держате;лем ферритового стержня 9 с держателем, узла 10 крепления и юстировки, узла 11 подвеса. Двухсекционная катушка 8 индуктивности с помощью деожателя 8, узла 10 крепления и юстировки 10 жестко соединяется с основанием 1 с возможностью перемещения в вертикальном направлении. Ферритовый стержень 9, располагаемый внутри катушки, с помощью держателя 8.и узла 11 подвеса соединяется со свободным концом упругого элемента. Преобразователь выполнен в виде мостовой схемы, количество которых оп ределяется количеством датчиков веса. Два плеча с индуктивностями 12 и 13 датчика с измерительным грузом 3 являются общими для всех мостовых схем. Мостом 12 -15 определяется тарировочный коэффициент, где индуктивности 14 и 15 относятся к датчику с тарировочным грузом 4. Мостом 12 и 13, 16 и 17 измеряется изменение веса в испытуемых образцах. В измерительную диагональ моста включены инвертор 18 компенсатор 19, вычислитель 20, переключатель 21. Мост питается от генератора 22 синусоидального колебания.
С помощью указанного устройства реализуется следующая зависимость между величиной сигнала и приращением веса, определяемая формулой
r.
U fi. и
-f-.-Vли„(и-2)
Р-1
где дРд - приращение веса, относителное;
РИ- вес измерительного груза; РГМ- вес тарировочного груза; йц - величина сигнала, пропорциональная РГЛ - РИ ;
bU , AUj , . . . , AUt,.2. величины сигналов
пропорциональные величинсхм Р - PJ,. . Рц-а-РИ где
Р т Р. ,. .. , Р(л|-2. - исходные веса испытуемых образцов материала.
Устройство работает следующим образом.
При изменении веса на испытуемых образцах ферритовый стержень 9 (фиг. 1) перемещается относительно катушки 3, при этом появляется сигнал лОц-г. пропорциональный P,-PI , п 3. Коэффициент пропорциональноети (тарировочный) определяется по формуле
Электрический сигнал от флуктуационных колебаний пружины в поперечном направлении частично компенсируется мостовой схемой. При указанных колебаниях ферритового стержня величины индуктивностей 12 и 13, и 14 и 15 или 12 и 13, 16 и 17 изменяются синфазно. Так как амплитуды колебаний зависят от расположения ферритового стержня в вертикальном положении, в диагонали моста возникнут флуктуационные сигналы от поперечных колебаний, которые накладываются на электрические сигналы от флуктуации вдоль оси катушки. Указанные флуктуационные сигналы сдвигают.си по фазе на ISO и подаются в компенсатор. Одновременно в компенсатор подаются сигналы непосредственно от датчика, в компенсаторе происходи уменьшение флуктуационного сигнала. Из компенсатора 19 сигнал подается в вычислитель 20, сигнал которого пропорциональный приращению веса, подается в регистратор 6. В вычислителе определяется усредненная величина приращения веса.
Грузы 3 и 4 выбираются такими по весу, чтобы они соответствовали пределам измерений. При этом, если Ру,Руу1 , должно соблюдаться условие
РИ Р-1 t Д... .«Ри-2 ± лРи-2 Р
Перед измерениями мосты балансируются посредством поочередного подвешивания .груза с весом, равным измерительному весу Рц .
Нулевого сигнала добиваются перемещением катушки 9 при помощи стержня в вертикальном направлении.
С помощью предлагаемого устройства можно определять экспериментальны способом изотермы сорбции при различных температурах. Семейство изотерм сорбции необходимо, например при расчете теплофизических характеристик ограждающих конструкций.
Формула изобретения
Устройство регистрации изменения веса, содержащее индуктивный датчик веса, через упругий элемент связанны с основанием, и регистратор, о т ли ч ающе е ся тем, что, с цель повышения точности измерений в широком диапазоне изменения параметров окружающей среды, обмотка катушки датчика веса выполнена двухсекционной, причем в устройство введены по меньшей мере два дополнительных датчика веса, один из которых снабжен грузом, равным нижнему пределу взвешивания, а другой - верхнему, и подключенный к регистратору преобразователь в виде мостовой схемы с включенными в ее измерительную диагональ последовательно соединенными инверто ром, компенсатором, вычислителем и
| название | год | авторы | номер документа |
|---|---|---|---|
| Весы с электромагнитным уравновешиванием | 1988 |
|
SU1515065A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ФОРСУНОК | 1991 |
|
RU2022662C1 |
| СПОСОБ ВЗВЕШИВАНИЯ ПОЛЕЗНОГО ГРУЗА В ПОДЪЕМНОМ СОСУДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2124468C1 |
| Большегрузные автоматические весы | 1984 |
|
SU1283539A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ ДИЭЛЕКТРИЧЕСКОГО ВЕЩЕСТВА | 2010 |
|
RU2445584C1 |
| Устройство для измерения поверхностного натяжения жидкости | 1983 |
|
SU1157408A1 |
| Преобразователь веса бурового инструмента и осевой нагрузки на долото | 1983 |
|
SU1148981A1 |
| Устройство для измерения контактного нажатия электрического аппарата | 1985 |
|
SU1372408A1 |
| Устройство для измерения статических и динамических давлений | 1960 |
|
SU133644A1 |
| Способ геоэлектроразведки и устройство для его реализации | 1982 |
|
SU1056115A1 |
