печивающих наложение требуемого числа гирь 47 и осуществление операций предварительного уравновешивания ко- ромксла 8, при котором оно отходит от упоров 58 и 59 и на отсчетном блоке 15 пропадает сигнал Перегрузка. Уравновешивающий компенсатор 12
1
Изобретение откосится к весоизмеительной технике, в частности, к весовым устройствам, имеющим системы ак гиревого, так и электромагнитного равновешивания.
Цель изобретения - повьш1ение точости измерения массы грузов, взвешиваемых в разных тарах.
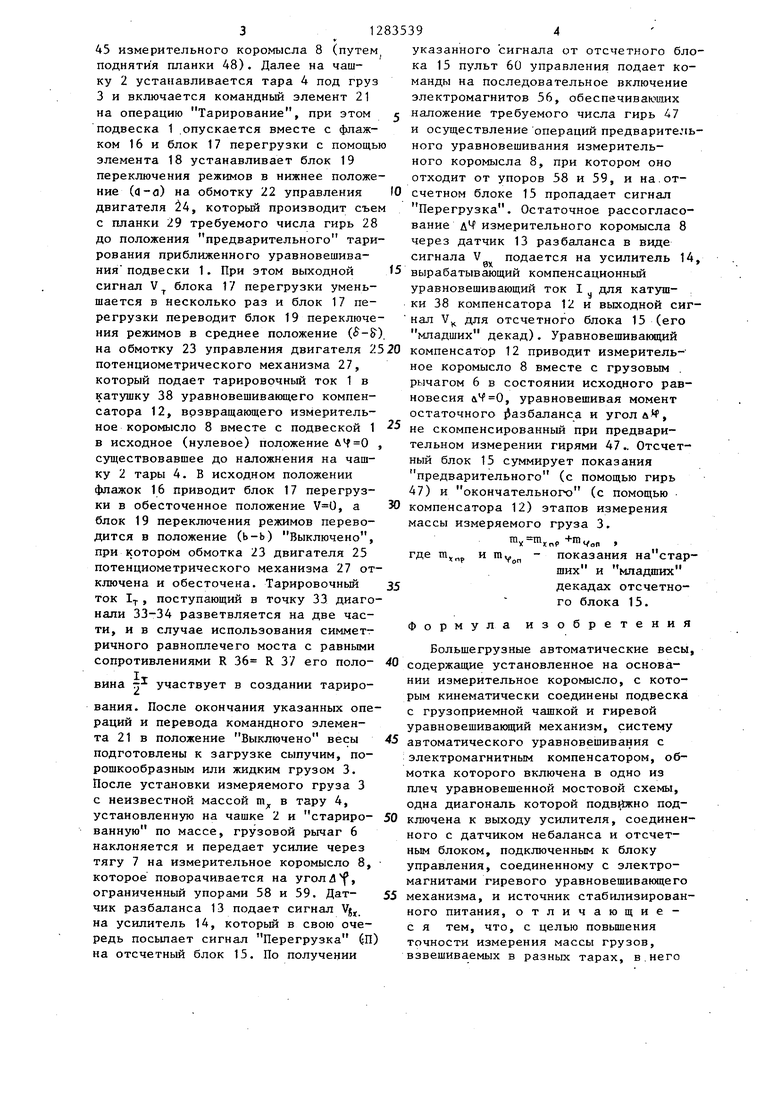
На чертеже показана схема большегрузных автоматических весов.
Весы содержат подвеску 1 с грузо- приемной чашкой 2 для измеряемого груза 3, например, сыпучего, порошкообразного или жидкого вида, установлен- ного в таре (сосуде) 4, ограниченный шарнир 5, грузовые рычаги 6 и 7, .измерительное коромысло 8, балансировочные 9 и регулировочные 10 устройства, противовес 11, уравновешивающий компенсатор 12, датчик 13 разбаланса, усилитель 14, отсчетный блок 15. На подвеске 1 с чашкой 2 установлен флажок 16. Блок 17 перегрузки, выходной элемент 18 которого, например, электромагнитного типа, управляет блоком 19 переключения режимов работы предварительного и точного тарирования. Блок 19 переключения режимов работы производит переключение сигналов управления V от ис- точника 20, поступающих ко- мандньм элемент 21 (тарирование) на обмотки 22 и 23 управления двигателей 24 и 25, соответственно дополнительного гиревого механизма 26 и потенциометрического механизма 27, Дополнительньй гиревый механизм 26 содержит набор гирь 28, установленных на планке.29 подвески 1, которые поднимаются и опускаются с помощью рычагов 30, подпружиненных пружинами 31 и управляемых через кодовые кулачки 32 двигателем 24. Потенциоприводит коромысло 8 вместе с рычагом 6 в исходное равновесие, уравновешивая момент остаточного разбаланса на угол, «е скомпенсированный при предварительном измерении гирями 47. Отсчетный блок 15 суммирует показания этапов измерения массы груза 3. 1 ил.
5
0
5
0
5
0
метрический механизм 27, подключенный к диагонали 33-34 уравновешенной мостовой схемы, образованной элементами 35 - 37 и компенсатором 12, питается от стабилизированного источника 39. Упругие безмоментМые токовводы 40 и 41 служат для подвода тарировочногоI 1 и уравновешивающего 1у тока от потенциометрического механизма 27 и усилителя 14 в катушку 38 компенсатора 12, Выход 42 усилителя 14 подключен к второй диагонали 43-44 мостовой схемы, и, таким образом, усилитель 14 и потенцио- метрический механизм 27 развязаны по электрическим сигналам и не влияют друг на друга. Измерительное коромысло 8 снабжено призмами 45, штоками 46 и встроенными цилиндрическими гирями 47. Штоки 46 взаимодействуют с планкой 48, закрепленной на перемещающемся вверх-вниз толкателе 49, которьЕЙ через кулачок 50 и ролик 51 связан с электродвигателем 52, управляемым от микровыключателей 53. Штоки 46 с гирями 47 при опускании планки 48 удерживаются электромагнитными пальцами 54, поджимаемыми пружинами 55 и задерживаемыми электромагнитами 56. Демпфер 57 служит для успокоения измерительного коромысла 8, а регулируемые упоры 58 и 59 для ограничения его угла закло- нения ufoT качения, от загрузки грузом 3 и тарой 4. Пульт управления 60, связанный с отсчетным блоком 15, подает команды на электромагниты 56, обеспечивающие положение требуемых гирь 47.
Весы работают следующим образом.
В исходном положении при отсутствии измерительного груза 3 и тары 4 на чашке 2 все гири 47 сняты с призм
45 измерительного коромысла 8 (путем поднятия планки 48). Далее на чашку 2 устанавливается тара 4 под груз 3 и включается командный элемент 21 на операцию Тарирование, при этом подвеска 1 .опускается вместе с флажком 16 и блок 17 перегрузки с помощью элемента 18 устанавливает блок 19 переключения режимов в нижнее положение (а-а) на обмотку 22 управления двигателя 4, который производит съем с планки 29 требуемого числа гирь 28
до положения предварительного тарирования приближенного уравновешивания подвески 1. При этом выходной сигнал V блока 17 перегрузки умень
шается в несколько раз и блок 17 перегрузки переводит блок 19 переключения режимов в среднее положение (- на обмотку 23 управления двигателя 2 потенциометрического механизма 27, который подает тарировочный ток 1 в катушку 38 уравновешивающего компенсатора 12, возвращающего измерительное коромысло 8 вместе с подвеской в исходное (нулевое) положение существовавшее до наложнения на чашку 2 тары 4. В исходном положении флажок 16 приводит блок 17 перегрузки в обесточенное положение , а блок 19 переключения режимов переводится в положение (Ь-Ь) Выключено, при котором обмотка 23 двигателя 25 потенциометрического механизма 27 отключена и обесточена. Тарировочньш ток IT, поступающий в точку 33 диагонали 33-34 разветвляется на две части, и в случае использования симмет
ричного равноплечего моста с равными сопротивлениями R 36 R 37 его половина
II
участвует в создании тарирования. После окончания указанных операций и перевода командного элемента 21 в положение Выключено весы подготовлены к загрузке сыпучим, порошкообразным или жидким грузом 3. После установки измеряемого груза 3
с неизвестной массой т.
в тару 4, ,
установленную на чашке 2 и стариро- ванную по массе, грузовой рычаг 6 наклоняется и передает усилие через тягу 7 на измерительное коромысло 8, которое поворачивается на угол Л , ограниченный упорами 58 и 59. Датчик разбаланса 13 подает сигнал Vj на усилитель 14, которьй в свою очередь посьшает сигнал Перегрузка Ш на отсчетный блок 15. По получении
j 10
35394
указанного сигнала от отсчетного блока 15 пульт 60 управления подает команды на последовательное включение электромагнитов 56, обеспечивающих наложение требуемого числа гирь 47 и осуществление операций предварительного уравновешивания измерительного коромысла 8, при котором оно отходит от упоров 58 и 59, и на.от- счетном блоке 15 пропадает сигнал Перегрузка. Остаточное рассогласование дЧ измерительного коромысла В через датчик 13 разбаланса в виде сигнала V подается на усилитель 14,
ex
20 компенсатор 354 С
- вырабатывающий компенсационный
уравновешивающий ток I для катушки 38 компенсатора 12 и выходной сиг
компенсатор
нал V для отсчетного блока 15 (его младших декад). Уравновещиваняций
12 приводит измеритель- ное коромысло 8 вместе с грузовым . рычагом 6 в состоянии исходного равновесия , уравновешивая момент остаточного разбаланса и уголл , не скомпенсированный при предварительном измерении гирями 47.. Отсчет- ный блок 15 суммирует показания
предварительного (с помощью гирь
(с помощью
47) и окончательного компенсатора 12) этапов измерения ассы измеряемого груза 3.
компенсатор
X
где т,„р и т
(пР П /„п
показания на старших и младших декадах отсчетного блока 15.
Формула изобретения
Большегрузные автоматические весы,
содержащие установленное на основании измерительное коромысло, с которым кинематически соединены подвеска с грузоприемной чашкой и гиревой уравновешивающий механизм, систему
автоматического уравновешивания с электромагнитным компенсатором, оботка которого включена в одно из плеч уравновешенной мостовой схемы, одна диагональ которой подвижно подключена к выходу усилителя, соединенного с датчиком небаланса и отсчет- ным блоком, подключенным к блоку управления, соединенному с электромагнитами гиревого уравновешивающего
механизма, и источник стабилизированного питания, отличающие- с я тем, что, с целью повышения точности измерения массы грузов, взвешиваемых в разных тарах, в.него
512
введены потенциометрический механизм тока точного тарирования с электро- 1двигателем, через потенциометр которого источник стабилизированного питания подключен к другой диагонали ;уравновешенной мостовой схемы, дополнительный гиревой уравновешивающий механизм с электродвигателем кинематически связанный с подвеской, блок перегрузки с флажком, закрепленным на грузоприемной чашке, и выходным . элементом, блок переключения режимов работы, источник сигналов управления и командный элемент, причем источник
сигналов управления подключен к входным контактам блока переключения режимов работы,.к двум выходным контактам которого подключены одни концы обмоток управления электродвигателей потенциометрического механизма тока точного тарирования идополнительного гиревого уравновешивающего механизма, другие концы которых через контакты командного элемента подключены к другим выходным контактам блока переключе- ниярежимов работы, кинематически соединенного с выходным элементом блока перегрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |
| Автоматические большегрузные весы | 1979 |
|
SU775627A1 |
| Способ компенсации температурной погрешности весов с гирной и силовой компенсацией | 1986 |
|
SU1446482A1 |
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
| Автоматические весы | 1981 |
|
SU1000771A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Разбраковочные весы | 1979 |
|
SU783593A2 |
Изобретение относится к весокз- мерительной технике и г озврляет повысить точность измерения массы грузов, взвешиваемых в разных.тарах. Датчик 13 разбаланса подает сигнал на усилитель 14, который посылает сигнал Перегрузка на отсчетный блок 15 и далее на пульт 60 управления, который подает команды на последовательное включение электромагнитов 56, обес52 I, J A- /ffVf/V f „ Та/уцро а е ю 00 со СП со со

| Весы с устройством предварительного взвешивания | 1973 |
|
SU469892A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматические большегрузные весы | 1979 |
|
SU775627A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
