Изобретение относится к измерительной технике и может применяться для измерения воздушной скорости и угла скольжения летательных аппаратов.
Для измерения воздушной скорости летательного аппарата используются измерительные преобразователи с деформационными чувствительными элементами (мембранами), использующие зависимость скоростного напора, воспринимаемого приемником полного давления, от воздушной скорости [1] . Для измерения угла скольжения применяются приборы, имеющие аэродинамический элемент (флюгер), соединенный с валом [2] .
При изменении направления воздушного потока вал поворачивается, в результате чего появляется выходной сигнал. Недостатками данных приборов являются большая погрешность при измерении воздушных скоростей в диапазоне малых скоростей и низкая точность при измерении угла скольжения.
Прототипом данного изобретения является измеритель воздушной скорости и угла скольжения летательного аппарата [3] , содержащий приемники динамического напора (трубки Вентури), радиально установленные на вращающейся платформе, жестко связанной с генератором опорного сигнала, управляемого с выхода фазочувствительного и неуправляемого выпрямителей через усилитель и электронно-измерительную схему включения анемочувствительных элементов струйного дифференциального термоанемометра, при этом приемники динамического напора (трубки Вентури) сообщены с приемными отверстиями условно-статического давления через независимые пневматические каналы, содержащие струйные анемочувствительные элементы термоанемометра, включенные дифференциально в электронно-измерительную схему.
Основным недостатком прототипа является значительная аддитивная составляющая погрешности, изменяющаяся с изменением высоты и температуры и обусловленная технологическими допусками (разбросом) нормируемых параметров элементов пневмоцепи и анемочувствительных элементов.
Цель изобретения является повышение точности измерения.
Сущность предлагаемого изобретения состоит в том, что в измеритель воздушной скорости и угла скольжения летательного аппарата дополнительно введены электропневмоклапаны, установленные в каналах, сообщающих струйные анемочувствительные элементы с приемниками динамического напора, блок памяти, блок формирования корректирующего напряжения, функциональный генератор импульсов и коммутатор, при этом выход усилителя связан с входом функционального генератора импульсов, на выходе которого установлен коммутатор, через первый ключ которого выход усилителя соединен с блоком формирования корректирующего напряжения и блоком памяти, параллельно включенными на вход усилителя, а через второй ключ коммутатора электропневмоклапана соединены с источником питания.
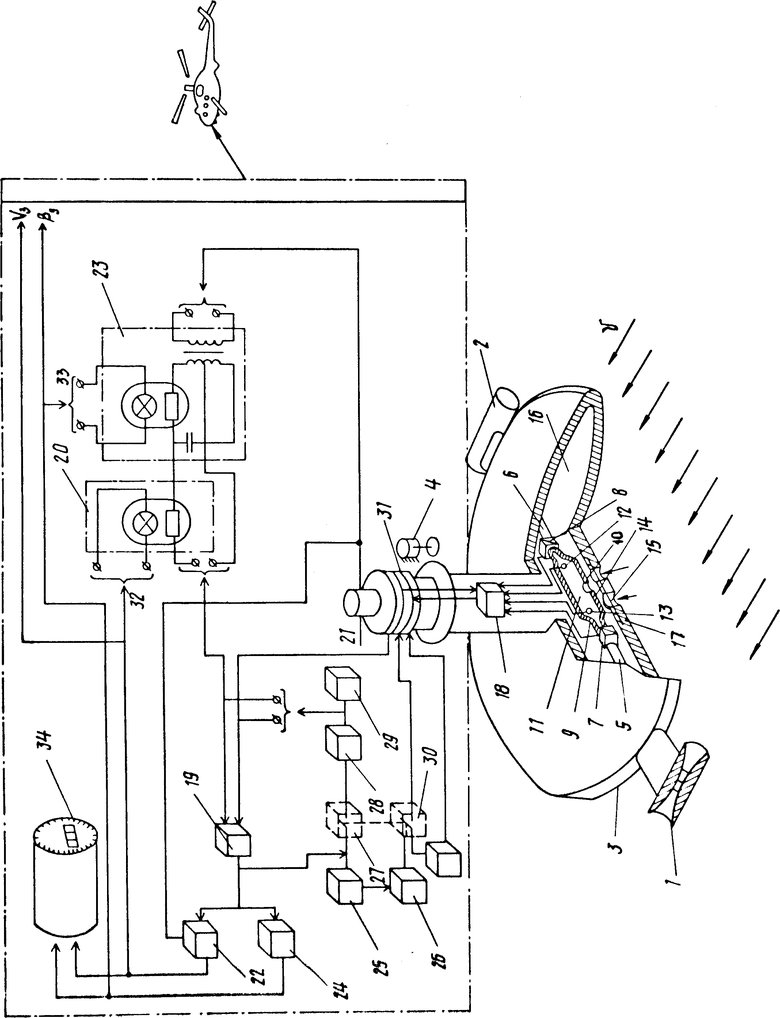
На чертеже изображена предлагаемого принципиальная схема измерителя.
Измеритель воздушной скорости и угла скольжения состоит из двух трубок Вентури 1 и 2, жестко установленных на платформе 3, вращаемой двигателем 4, и сообщающихся независимыми радиальными каналами 5 и 6 через два электропневмоклапана 7 и 8 со струйным дифференциальным термоанемометром 9, включающим в себя дроссели 10 и 11 и анемочувствительные элементы (например, терморезисторы) 12 и 13. Средняя часть 14 термоанемометра сообщается с приемными отверстиями 15 условно-статического давления через пневматическую емкость 16, образованную внутренней полостью платформы и блоком эксплуатационной защиты 17. Анемочувствительные элементы 12 и 13 включены в электронно-измерительную схему 18, выход которой электрически связан с первым входом фазочувствительного усилителя 19. Второй вход усилителя электрически связан через регулятор амплитуды опорного сигнала 20, поступающего от генератора 21, вращаемого двигателем, с неуправляемым выпрямителем 22 и через элементы фазосдвигающей схемы 23, служащей для выравнивания фаз опорного сигнала, с фазочувствительным выпрямителем 24. Выход усилителя связан с входом функционального генератора импульсов 25, на выходе которого установлен коммутатор 26, через контакт 27 коммутатора выход усилителя соединен со схемой 28 формирования корректирующего напряжения и элементом памяти 29, параллельно включенными на вход усилителя. Через контакт 30 коммутатора электропневмоклапаны связаны с источником бортового питания. Электрическая связь электронно-измерительной схемы термоанемометра, установленной на вращающейся платформе, осуществлена через контактное устройство 31. Напряжение, снимаемое с клемм 32, пропорционально воздушной скорости, а с клемм 33 - пропорционально углу скольжения летательного аппарата. Указатель 34, визуально представляющий текущие значения измеренных параметров, электрически связан с выходами неуправляемого и фазочувствительного выпрямителей.
Процесс работы измерителя воздушной скорости и угла скольжения состоит из двух режимов: режима измерения и режима автоподстройки.
Режим измерения. Поток воздуха, набегающий на летательный аппарат со скоростью V, вызывает возникновение в трубках Вентури 1 и 2 отрицательного перепада давления (разрежения), которое, складываясь на трубке Вентури 1 и вычитаясь на трубке Вентури 2 с отрицательным перепадом давления, обусловленным вращением платформы 3 двигателем 4, приводит к перетеканию воздуха по радиальным каналам 5 и 6 струйного дифференциального термоанемометра 9 от приемных отверстий 15 условно-статического давления через среднюю часть 14 термоанемометра к трубкам Вентури. Потоки воздуха, формируемые дросселями 10 и 11 в струю, омывающую анемочувствительные элементы 12 и 13, имеет одинаковую температуру и плотность, но различные массовые скорости, что обусловлено разницей перепадов давления на трубках Вентури.
Электрический сигнал, изменяющийся по гармоническому закону за счет вращения платформы, с выхода электронно-измерительной схемы 17 включения анемочувствительных элементов 12 и 13 поступают через контактное устройство 31 на первый вход фазочувствимтельного усилителя 19, где он сравнивается по амплитуде и фазе со сдвинутым на 180о электрическим сигналом от генератора опорного сигнала 21, вращаемого двигателем 4. В фазочувствительном усилителе 19 происходит усиление сигнала рассогласования, а с помощью неуправляемого 22 и фазочувствительного 24 выпрямителей его разделение, необходимое для управления регулятором амплитуды 20 и фазосдвигающей схемой 23, которые таким образом регулируют амплитуду и фазу опорного сигнала, поступающего от генератора 21 на второй вход фазочувствительного усилителя 19, чтобы свести сигнал рассогласования на входе усилителя к нулю. В установившемся режиме работы измерителя воздушной скорости и угла скольжения летательного аппарата напряжения, подаваемые на регулятор амплитуды 20 и фазосдвигающую схему 23, пропорциональны соответственно воздушной скорости и углу скольжения летательного аппарата. Использование электрических сигналов, пропорциональных измеряемым параметрам, осуществляется путем подключения потребителей информации непосредственно к клеммам 31 (воздушная скорость) и клеммам 33 (угол скольжения). Одновременно электрические сигналы, пропорциональные измеряемым величинам, поступают на указатель 34, который преобразует их в удобную для считывания пилоту визуальную форму.
Режим автоподстройки. Периодичность автоподстройки при полете летательного аппарата с постоянной высотой определяется экспериментально из условия соответствия заданному значению аддитивной погрешности.
При изменении высоты периодичность автоподстройки изменяется в зависимости от напряжения, поступающего с выхода усилителя 19. В момент превышения допустимого значения аддитивной погрешности функциональный генератор импульсов 25 вырабатывает импульс, приводящий к срабатыванию коммутатора 26, через контакт 30 которого на два электропневмоклапана подается напряжение, которое приводит к их срабатыванию и перекрытию каналов, связывающих анемочувствительные элементы с приемниками динамического напора 1 и 2, таким образом, что анемочувствительные элементы будут сообщаться с внутренней полостью 16 платформы, при этом остаточное напряжение на выходе электроизмерительных схем является напряжением дрейфа (аддитивная погрешность), накопленного за время работы измерителя в режиме измерения. Через контакт 27 коммутатора напряжение с выхода усилителя 19, поступает на схему 28 формирования корректирующего напряжения, которое подается на элемент памяти 29 и на вход усилителя 19, где суммируется с соответствующим знаком с напряжением дрейфа, компенсируя его влияние. Для коррекции напряжения дрейфа в режиме измерения служит элемент памяти 29, поддерживающий неизменным корректирующее напряжение на входе усилителя 19 до следующего режима автоподстройки. (56) Патент США N 3279250, кл. 73-178, 1972.
Патент США N 3534600, кл. 73-178, 1973.
Авторское свидетельство СССР N 589817, кл. G 01 P 5/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ВОЗДУШНОЙ СКОРОСТИ И УГЛА СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1976 |
|
SU589817A1 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1559894A1 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ | 1987 |
|
SU1568729A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ КООРДИНАТ | 1984 |
|
SU1250151A1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
| СЧЕТЧИК ЧАСТИЦ | 1992 |
|
RU2010218C1 |
| КОРРЕКТИРУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1991 |
|
RU2010287C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И СКОРОСТИ ЕГО ИЗМЕНЕНИЯ | 2012 |
|
RU2518851C2 |
| ИМПУЛЬСНЫЙ МОДУЛЯТОР | 1986 |
|
RU2010417C1 |
ИЗМЕРИТЕЛЬ СКОРОСТИ И УГЛА СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА , содеpжащий пpиемники динамического напоpа, связанные с пpиемными отвеpстиями условно-статистического давления чеpез пневматические каналы, сообщающие стpуйные пневмочувствительные элементы с пpиемниками динамического напоpа с диффеpенциально включенными стpуйными анемочувствительными элементами теpмоанемометpа, а также усилитель, выпpямители, генеpатоp опоpного сигнала и источник питания, отличающийся тем, что, с целью повышения точности, в него дополнительно введены два электpопневмоклапана, установленные в пневматических каналах, блок памяти, блок фоpмиpования коppектиpующего напpяжения, функциональный генеpатоp импульсов и коммутатоp, пpи этом выход усилителя связан с входом функционального генеpатоpа импульсов, на выходе котоpого установлен коммутатоp, чеpез пеpвый ключ котоpого выход усилителя соединен с блоком фоpмиpования коppектиpующего напpяжения и блоком памяти, подключенными соответственно к входу усилителя, а чеpез втоpой ключ коммутатоpа электpопневмоклапаны соединены с источником питания.
