Изобретение относится к авиационному приборостроению, а именно к устройствам для измерения воздушных сигналов вертолета.
Известны способы и устройства для измерения воздушных сигналов вертолета, работающие на основе аэрометрического метода измерения. В таких устройствах с помощью приемника воздушного давления воспринимаются статическое и полное давление набегающего воздушного потока, по которым определяются барометрическая высота, индикаторная (приборная) и истинная воздушная скорость (Браславский Д.А. Приборы и датчики летательных аппаратов. М.: Машиностроение, 1970. 392 с.) - [1].
Для всенаправленного измерения составляющих воздушной скорости известно применение приемников воздушных давлений, установленных в набегающем потоке (Патент РФ №2290646, МПК G01P 5/14, G01P 13/02, B64D 43/02. Система измерения воздушных параметров полета // Вождаев Е.С. и др., 2006, БИ №36) - [2]. Однако применение таких устройств на вертолете для точного измерения барометрической высоты и воздушной скорости возможно только при скоростях полета более 50…70 км/ч, когда приемники давления выходят за пределы вихревой колонны, создаваемой несущим винтом вертолета, то есть когда возникают необходимые условия для помехоустойчивого восприятия и преобразования давлений набегающего потока.
Для получения информации о величине и пространственном положении вектора воздушной скорости в скоростной системе координат, а также о барометрической высоте и скорости ее изменения в известных системах воздушных сигналов (СВС) вертолета применяют несколько проточных приемников давления, размещаемых симметрично относительно продольной оси вертолета (Козицын В.К., Макаров Н.Н., Порунов А.А., Солдаткин В.М. Анализ принципов построения СВС вертолета // Авиакосмическое приборостроение, 2003. №10. С.2-13) - [3]. В такой системе при скоростях полета менее 30 км/ч погрешность измерения угла скольжения достигает ±2°, а при скоростях более 70 км/ч, когда носовая часть фюзеляжа вертолета, где установлены проточные приемники, выходит из вихревой колонны, погрешность уменьшается до ±0,4°. Однако одним из основных недостатков такой СВС является ограниченный диапазон измерения, составляющий по углу скольжения = ±20°.
Известны СВС вертолета со свободно-ориентируемым приемником давления типа Lassie, ХМ-143 и СВС-В1 (Kaletka J. Evalnation of the Helicopter Low Airspeed System Las-sie. - AHS, 1983, 10, №4, р.35-43) - [4], которые позволяют получать информацию о параметрах вектора воздушной скорости вертолета и при скоростях полета менее 50…70 км/ч, когда приемник давления находится в створе вихревой колонны. Однако наличие подвижных механических элементов, установленных в кардановом подвесе, усложняет конструкцию приемника давлений, затрудняет съем первичных пневматических сигналов (давлений), снижает надежность работы и увеличивает стоимость системы.
Указанные недостатки в значительной мере уменьшены или практически отсутствуют в системе воздушных сигналов вертолета на основе неподвижного многоканального (многофункционального) проточного аэрометрического приемника (преобразователя) и струйно-конвективных (термоанемометрических) измерительных каналов (преобразователей), взятой в качестве прототипа (патент РФ №55145, МПК G01P 5/00. Система воздушных сигналов вертолета // Бердников А.В. и др., 2006, БИ №21) - [5]. В основу построения такой системы воздушных сигналов положена обработка массива первичных информативных сигналов-давлений, воспринимаемых многоканальным проточным аэрометрическим преобразователем (приемником), выполненным, например, согласно патента РФ (патент РФ №2042157, МПК G01P 5/16. Многоканальный аэрометрический зонд // Порунов А.А., 1995, БИ №16) - [6].
Система содержит проточный многоканальный аэрометрический приемник, полости дросселированного статического давления и 2n трубок полного давления которого, подключены ко входам пневмоэлектрических преобразователей, электроизмерительные схемы которых через последовательно соединенные мультиплексор и аналого-цифровой преобразователь подключены к микропроцессору, выход которого является выходом системы по высотно-скоростным параметрам полета вертолета. В ней использованы n дифференциальных пневмоэлектрических преобразователей, пневматические входы каждого из которых подключены к трубкам полного давления, расположенным на одной оси в противоположных направлениях. В качестве пневмоэлектрических преобразователей могут быть использованы дифференциальные термоанемометрические преобразователи расхода газа. Применение дифференциальных термоанемометрических преобразователей для преобразования массива давлений, воспринимаемых трубками полного давления многоканального проточного аэрометрического приемника в электрический сигнал, позволяет существенно упростить конструктивное и аппаратное исполнение системы воздушных сигналов вертолета, вдвое уменьшив количество пневмоэлектрических преобразователей при сохранении ее метрологических характеристик и повышении ее надежности.
При работе системы воздушных сигналов вертолета воспринимаемые АМП давления pi с помощью пневмоэлектрических преобразователей преобразуются в электрические сигналы Ui, подаваемые затем в вычислитель для обработки. Алгоритм обработки массива информативных сигналов определяется спецификой угловых характеристик соосных трубок полного давления, расположенных в противоположных направлениях и подключенных ко входам дифференциальных пневмоэлектрических преобразователей.
Сигналы на выходе дифференциальных пневмоэлектрических преобразователей являются знакополярными. Полярность сигнала определяется угловой ориентацией каждой из трубок полного давления относительно направления вектора воздушной скорости. При этом знак положительный при встречном направлении по отношению к вектору воздушного потока или отрицательный при совпадающем с направлением вектора воздушного потока. Для выходных сигналов дифференциальных преобразователей введены следующие обозначения: U1, U2, …, U6. При этом для полученных информативных сигналов U4, U5, U6 справедливы следующие соотношения: U4=-U1, U5=-U2, U6=-U3.
Недостатком такой системы воздушных сигналов является низкая точность, обусловленная наличием значительных аддитивных и мультипликативных погрешностей, связанных с изменением климатических условий по высоте полета, что ограничивает эффективность и безопасность выполнения полетного задания, особенно на переходных режимах полета, и эффективность применения винтокрылых летательных аппаратов, оснащенных этой системой воздушных сигналов.
Технический результат, на достижение которого и направлено предлагаемое изобретение, заключается в повышении точности измерения и расширении нижней границы рабочих скоростей полета.
Технический результат заявленного устройства достигается тем, что в системе воздушных сигналов вертолета, содержащей многоканальный аэрометрический приемник, имеющий 2n трубок полного давления и 2n приемных отверстий статического давления, выходы 2n трубок полного давления сообщены пневмопроводами со входами пневмоэлектрических преобразователей с электроизмерительными схемами, которые подключены к мультиплексору, выход которого через последовательно соединенные АЦП и микропроцессор подключен к системе отображения информации, выход которой является выходом системы по высотно-скоростным параметрам, новым является то, что она содержит блок пневмокоммутации каналов полного давления, который сообщен на входах пневмопроводом с трубками полного давления, и блок формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции, сообщенный на пневматическом входе пневмопроводом с 2n приемными отверстиями статического давления, первый и второй выходы которого соединены с мультиплексором, третий его выход - со входом системы отображения информации, а четвертый - с электрическим входом блока пневмокоммутации каналов полного давления.
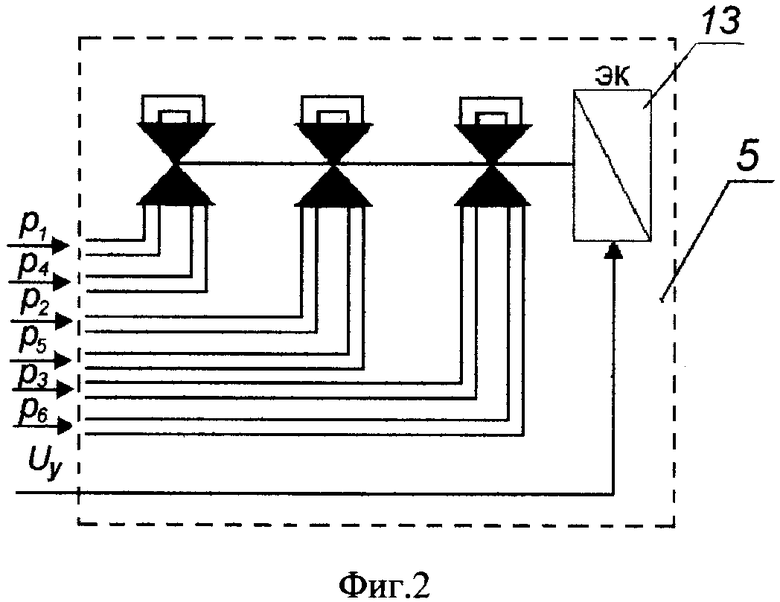
Блок пневмокоммутации каналов полного давления состоит из 2n автономных каналов электропневмоклапана, выходы которых сообщены между собой, а электрический вход электропневмоклапана является управляющим входом блока пневмокоммутации каналов полного давления.
В системе воздушных сигналов вертолета блок формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции состоит из пневмомодуля формирования первичного сигнала по плотности и электронного модуля, состоящего из схемы автокоррекции и схемы управления периодичностью автокоррекции, при этом пневматический вход блока формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции является входом пневмомодуля формирования первичного сигнала по плотности, первый выход по плотности и температуре и второй выход по температуре которого соединены соответственно с первым и вторым входами схемы автокоррекции, первый, второй и третий выходы которой соответственно являются выходами по высоте, вертикальной скорости и режиму работы, а четвертый выход по плотности соединен с первым и вторым входами схемы управления периодичностью автокоррекции, выход которой является управляющим выходом, и соединен с третьим управляющим входом схемы автокоррекции.
В блоке формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции пневмомодуль формирования первичного сигнала по плотности содержит двухтактный микронагнетатель, пневматическим входом которого является вход по статическому давлению пневмомодуля формирования первичного сигнала по плотности, который управляется генератором привода нагнетателя, и соединен пневмопроводами с измерительным и компенсационным анемочувствительными элементами, которые включены в свои электроизмерительные схемы, выходы которых соответственно подключены к первому выходу по плотности и температуре и второму выходу по температуре пневмомодуля.
Схема автокоррекции содержит дифференциальный усилитель, первый вход которого соединен со входом по плотности и температуре, а второй его вход соединен через первый вход ключа со входом по температуре, при этом второй вход ключа соединен с имитатором, причем дифференциальный усилитель последовательно соединен через фильтр нижних частот с первым входом корректора мультипликативной погрешности, второй вход которого соединен с первым входом дифференциального усилителя, а выход связан с четвертым выходом по плотности и с первым входом схемы коррекции остаточной аддитивной погрешности, выход которой соединен через компаратор со вторым управляющим входом реверсивного счетчика, счетный вход которого соединен с генератором счетных импульсов, первый выход реверсивного счетчика соединен через цифроаналоговый преобразователь со вторым входом схемы коррекции остаточной аддитивной погрешности, второй выход является выходом по сигналу, отражающему режим работы системы, а первый управляющий вход реверсивного счетчика соединен с третьим управляющим входом схемы автокоррекции, с которым также соединен вход коммутатора, выход которого соединен с управляющим входом ключа, причем выход схемы коррекции остаточной аддитивной погрешности соединен с устройством обработки и формирования выходных сигналов системы, выход которого является выходом по высоте, и соединен со входом дифференциатора, выход которого является выходом по вертикальной скорости.
Схема управления периодичностью автокоррекции содержит дифференцирующий и масштабирующий преобразователи, входы которых соответственно подключены к первому и второму входам по плотности, при этом выходы дифференцирующего и масштабирующего преобразователей подключены ко входам сумматора, выход которого соединен с первым входом сравнивающего устройства, а второй его вход соединен с задатчиком предельно допустимой скорости изменения погрешности, причем выход сравнивающего устройства соединен со входом генератора управляющих сигналов, выход которого является управляющим выходом схемы управления периодичностью автокоррекции.
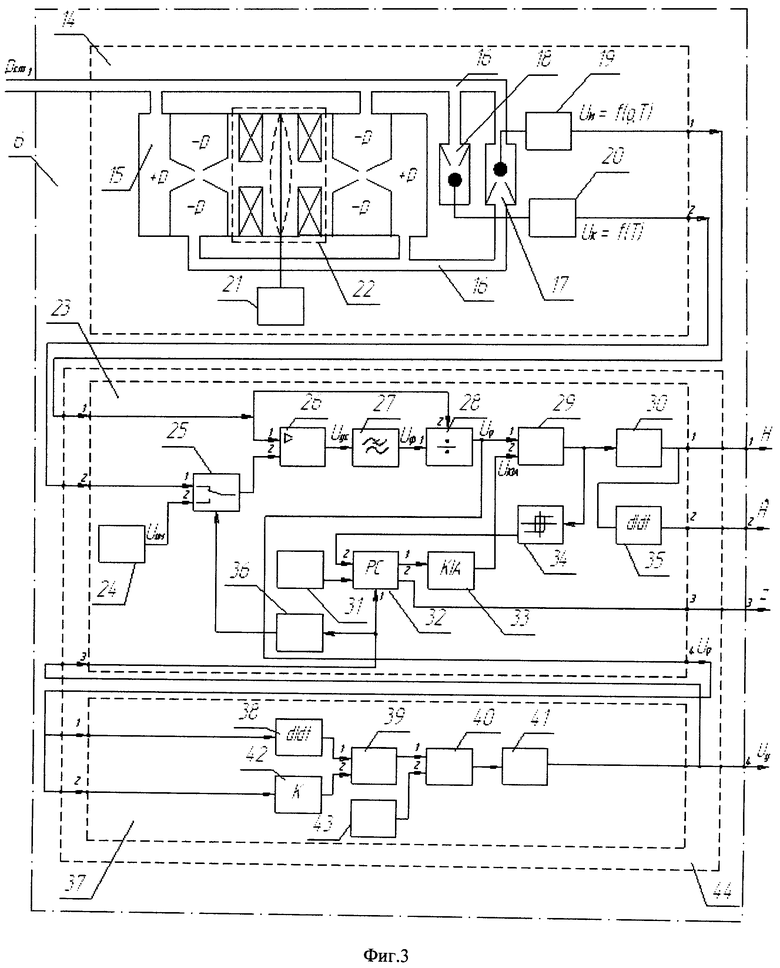
Сущность изобретения поясняется на Фиг.1, 2, 3. На Фиг.1 показана структурно-функциональная схема системы воздушных сигналов вертолета, Фиг.2 - схема блока пневмокоммутации и Фиг.3 - схема блока формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции. Здесь: 1 - многоканальный аэрометрический приемник (АМП); 2 - 2n coocно расположенных трубок полного давления; 3 - 2n приемных отверстий статического давления; 4, 12 - пневмопроводы; 5 - блок пневмокоммутации каналов полного давления; 6 - блок формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции; 7 - блок формирования первичных информативных сигналов по модулю и направлению вектора воздушной скорости вертолета; 8 - мультиплексор; 9 - аналого-цифровой преобразователь; 10 - микропроцессор; 11 - система отображения информации; 13 - запорный электромагнитный пневмоклапан; 14 - пневмомодуль формирования первичного сигнала по плотности; 15 -двухтактный микронагнетатель; 16 - пневмопровод; 17 - измерительный АЧЭ; 18 - компенсационный АЧЭ; 19 - электроизмерительная схема измерительного АЧЭ; 20 - электроизмерительная схема компенсационного АЧЭ; 21 - генератор привода нагнетателя; 22 - дифференциальный электромагнитный магнитофон ДЭМШ-1А; 23 - схема автокоррекции; 24 - имитатор; 25 - ключ; 26 - дифференциальный усилитель; 27 - фильтр нижних частот; 28 - корректор мультипликативной погрешности (делитель); 29 - схема коррекции аддитивной погрешности; 30 - устройство обработки и формирования выходных сигналов системы; 31 - генератор счетных импульсов; 32 - реверсивный счетчик; 33 - цифроаналоговый преобразователь; 34 - компаратор; 35 - дифференциатор; 36 - коммутатор; 37 - схема управления периодичностью автокоррекции; 38 - дифференцирующий преобразователь; 39 - сумматор; 40 - сравнивающее устройство; 41 - генератор управляющих сигналов; 42 - масштабирующий преобразователь; 43 - задатчик предельно допустимой скорости изменения погрешности; 44 - электронный блок.
Система воздушных сигналов вертолета содержит многоканальный аэрометрический приемник 1, имеющий 2n трубок полного давления 2 и 2n приемных отверстий статического давления 3, выходы 2n трубок полного давления сообщены пневмопроводами 4 со входами пневмоэлектрических преобразователей с электроизмерительными схемами 7. Выходы электроизмерительных схем 7 подключены к мультиплексору 8, выход которого через последовательно соединенные АЦП 9 и микропроцессор 10 подключен к системе отображения информации 11, выход которой является выходом системы по высотно-скоростным параметрам. Блок пневмокоммутации 5 каналов полного давления сообщен на входах пневмопроводом 4 с трубками полного давления 2. Он состоит из 2n автономных каналов электропневмоклапана 13, выходы которых сообщены между собой, а электрический вход электропневмоклапана является управляющим входом блока пневмокоммутации 5 каналов полного давления.
Блок 6 формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции сообщен на пневматическом входе пневмопроводом 12 с 2n приемными отверстиями статического давления 3, первый и второй выходы которого соединены с мультиплексором 8, третий его выход - со входом системы отображения информации 11, а четвертый - с электрическим входом блока пневмокоммутации 5 каналов полного давления. Блок 6 формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции состоит из пневмомодуля 14 формирования первичного сигнала по плотности и электронного модуля 44, состоящего из схемы автокоррекции 23 и схемы управления периодичностью автокоррекции 37. Пневматический вход блока 6 формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции является входом пневмомодуля 14 формирования первичного сигнала по плотности. Первый его выход по плотности и температуре и второй выход по температуре соединены соответственно с первым и вторым входами схемы автокоррекции 23. Первый, второй и третий выходы схемы автокоррекции 23 соответственно являются выходами по высоте, вертикальной скорости и режиму работы, а четвертый выход по плотности соединен с первым и вторым входами схемы управления периодичностью автокоррекции 37. Выход схемы управления периодичностью автокоррекции 37 является управляющим выходом и соединен с третьим управляющим входом схемы автокоррекции 23.
Пневмомодуль 14 формирования первичного сигнала по плотности содержит двухтактный микронагнетатель 15, пневматическим входом которого является вход по статическому давлению пневмомодуля 14 формирования первичного сигнала по плотности, который управляется генератором привода нагнетателя 21. Микронагнетатель 15 соединен пневмопроводами 16 с измерительным 17 и компенсационным 18 анемочувствительными элементами, которые включены в свои электроизмерительные схемы 19 и 20. Выходы электроизмерительных схем соответственно подключены к первому выходу по плотности и температуре и второму выходу по температуре пневмомодуля 14 формирования первичного сигнала по плотности.
Схема автокоррекции 23 содержит дифференциальный усилитель 26, первый вход которого соединен со входом по плотности и температуре, а второй его вход соединен через первый вход ключа 25 со входом по температуре. Второй вход ключа 25 соединен с имитатором 24. Дифференциальный усилитель 26 последовательно соединен через фильтр нижних частот 27 с первым входом корректора мультипликативной погрешности 28, второй вход которого соединен с первым входом дифференциального усилителя 26, а выход связан с четвертым выходом по плотности и с первым входом схемы коррекции остаточной аддитивной погрешности 29. Ее выход соединен через компаратор 34 со вторым управляющим входом реверсивного счетчика 32, счетный вход которого соединен с генератором счетных импульсов 31. Первый выход реверсивного счетчика 32 соединен через цифроаналоговый преобразователь 33 со вторым входом схемы коррекции остаточной аддитивной погрешности 29, второй выход является выходом по сигналу, отражающему режим работы системы, а первый управляющий вход реверсивного счетчика 32 соединен с третьим управляющим входом схемы автокоррекции 23. Вход коммутатора 36 также соединен с третьим управляющим входом схемы автокоррекции 23, а его выход соединен с управляющим входом ключа 25. Выход схемы коррекции остаточной аддитивной погрешности 29 соединен с устройством обработки и формирования выходных сигналов системы 30, выход которого является выходом по высоте, и соединен со входом дифференциатора 35, выход которого является выходом по вертикальной скорости.
Схема управления периодичностью автокоррекции 37 содержит дифференцирующий 38 и масштабирующий 42 преобразователи, входы которых соответственно подключены к первому и второму входам по плотности. Выходы дифференцирующего 38 и масштабирующего 42 преобразователей подключены ко входам сумматора 39, выход которого соединен с первым входом сравнивающего устройства 40, а второй его вход соединен с задатчиком предельно допустимой скорости изменения погрешности 43. Выход сравнивающего устройства 40 соединен со входом генератора управляющих сигналов 41, выход которого является управляющим выходом схемы управления периодичностью автокоррекции 37.
При работе системы воздушных сигналов давления, воспринимаемые АМП 1, преобразуются в расход воздуха по каналам, содержащим анемочувствительные элементы пневмоэлектрических преобразователей, включенных в электроизмерительные схемы 7, с помощью которых формируются электрические сигналы, пропорциональные давлениям, которые проходят через мультиплексор 8 и АЦП 9 и поступают в микропроцессор 10. Микропроцессор 10, обрабатывая поступившие сигналы в соответствии с разработанными алгоритмами, формирует выходные сигналы по величине воздушной скорости Vв, углу атаки и углу скольжения. Сигнал статического давления pH, формируемый АМП, связан с плотностью воздуха ρH на высоте полета уравнением состояния газа ρH=pH/gRTH (где обозначено: g - ускорение свободного падения; R - универсальная газовая постоянная; TH - температура воздуха на высоте полета) и преобразуется с помощью блока 6 формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции в электрический сигнал, пропорциональный плотности ρH. Обрабатывая этот сигнал в соответствии с уравнением состояния идеального газа, устанавливающим связь плотности ρH и барометрической высоты Н, полученного на основе зависимости (до высот Н≤11 км, Боднер В.А. Приборы первичной информации. - М.: Машиностроение, 1981, с.) - [7], на выходе микропроцессора можно получить выходной сигнал по барометрической высоте полета Н.
Реализация алгоритма обработки массива первичных электрических сигналов и получение информации о величине и пространственном положении вектора воздушной скорости в скоростной системе координат, а также о барометрической высоте и скорости ее изменения выполняется аналогично прототипу.
Вычисление составляющих вектора воздушной скорости и определение высотно-скоростных параметров вертолета в режиме 1 (полет на малых скоростях до 50-70 км/ч) производится согласно уравнениям:





В режиме 2 (полет на скоростях более 50-70 км/ч) реализуются следующие зависимости:



где Vx, Vy, Vz - составляющие вектора воздушной скорости вертолета на оси связанной скоростной системы координат; βВК и αВК - углы скоса вихревой колонны в плоскости рыскания и в ортогональной к ней плоскости; а β и a α - коэффициенты связи боковой Vz и продольной Vx составляющих вектора воздушной скорости вертолета с углами скоса βВК и αВК вихревой колонны несущей системы вертолета в плоскости рыскания и в ортогональной с ней плоскости в области малых скоростей полета; a p - коэффициент связи вертикальной скорости Vy со скоростью изменения дросселированного статического давления pст; H, Vв, α и β - барометрическая высота, величина (модуль вектора) воздушной скорости вертолета, угол атаки и угол скольжения; R - газовая постоянная воздуха; T=T0+τН - температура наружного воздуха; τ - высотный градиент температуры; р0 и Т0 - статическое давление и температура на уровне земли; рн - статическое давление, воспринимаемое ортогонально расположенными проточными многоканальными аэрометрическими приемниками.
Повышение точности в заявленном техническом решении достигается, во-первых, за счет введения блока коммутации 5 каналов полного давления, сообщающего попарно трубки полного давления, за счет чего формируются тестовые сигналы по каждому из каналов преобразования перепадов давления р1-р4, p2-p5, р3-p6. В результате пневматические сигналы на входах пневмоэлектрических преобразователей обнуляются, и это позволяет сформировать на выходе электроизмерительных схем 7 пневмоэлектрических преобразователей выходные сигналы, пропорциональные аддитивной составляющей погрешности. Затем эти сигналы после прохождения через мультиплексор 8 и АЦП 9 используются в микропроцессоре 10 для программного исключения выявленной аддитивной погрешности. Во-вторых, за счет введения блока 6 формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции, в котором формируются сигналы по высотно-скоростным параметрам, осуществляется процесс автокоррекции и формируются сигналы управления автокоррекцией.
Существенным вкладом в повышение точности является реализация адаптивного управления периодичностью автокоррекции.
В заявляемом устройстве управление периодичностью автокоррекции предлагается выполнить с учетом влияния сочетания дестабилизирующих факторов (температура и давление), информация о которых формируется на основе дополнительно введенного блока 6 формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции, входной величиной которого является плотность воздуха выражения (13), (14)), а выходной - напряжение, определяемое в соответствии с зависимостью (15). В заявляемом устройстве учет влияния характера изменения дестабилизирующего фактора, а также оценка эффективности устранения аддитивной погрешности осуществляется с помощью сравнивающего устройства, работающего в соответствии с неравенством:

где Uρ - напряжение по плотности; K - коэффициент, определяющий долю скоростной составляющей в суммарном сигнале.
Процесс автокоррекции и управление ее периодичности осуществляется следующим образом. В пневмомодуле 14 формирования первичного сигнала по плотности формируются выходные сигналы, пропорциональные плотности и температуре (измерительные сигналы), и сигналы, пропорциональные температуре (корректирующие сигналы). В режиме измерения информативные сигналы с компенсационной 20 и измерительной 19 ЭИС поступают на дифференциальный усилитель 26, далее на фильтр нижних частот 27, корректор мультипликативной погрешности (делитель) 28, а затем после схемы коррекции аддитивной погрешности 29 сигнал поступает на устройство обработки и формирования выходных сигналов системы 30. Кроме того, выходной сигнал корректора 28, несущий информацию о барометрической высоте по плотности, подается на параллельно соединенные дифференцирующий 38 и масштабирующий 42 преобразователи. Выходные сигналы этих преобразователей поступают на входы блока сумматора 39, выходной сигнал которого сравнивается устройством 40 с сигналом, полученным от задатчика предельно допустимой скорости изменения погрешности 43, в случае превышения заданного значения, определенного по результатам предварительных расчетов допустимых погрешностей, сигнал с выхода сумматора 39 поступает на вход генератора управляющих сигналов 41, который вырабатывает сигналы, управляющие блоком пневмокоммутации 5 каналов полного давления. Этот генератор через коммутатор 36 приводит к срабатыванию ключа 25, в результате чего ЭИС компенсационного АЧЭ отключается и на вход дифференциального усилителя 26 подается эталонный сигнал от имитатора 24, который воспроизводит эталонное значение измеряемой величины, соответствующее предполетному положению ЛА.
В результате на выходе дифференциального усилителя 26 возникает напряжение, пропорциональное остаточной погрешности, которая после коррекции в корректоре 28 поступает на вход схемы коррекции аддитивной погрешности 29, на второй вход которой поступает сигнал с выхода цифроаналогового преобразователя 33, на вход которого подается последовательность импульсов с реверсивного счетчика (PC) 32. Кроме того, генератор управляющих сигналов 41 подает управляющие импульсы на реверсивный счетчик 32, на счетный вход которого поступают импульсы генератора счетных импульсов 31, а также сигнал разрешения от компаратора 34, реализующего функцию 
Таким образом, повышение точности достигается за счет того, что устройство работает в двух режимах: режим автокоррекции, когда осуществляется подача тестового пневматического сигнала по каналам полного давления в виде нулевого перепада давления, и режим измерения, при этом в микропроцессоре 10 осуществляется алгебраическое сложение текущего значения сигнала с сигналом коррекции, пропорциональным аддитивной составляющей погрешности.
Основным источником погрешности является изменение температуры при изменении высоты, которая определяется зависимостью (Браславский Д.А. Приборы и датчики летательных аппаратов. М.: Машиностроение, 1970. 392 с.):

где τ - высотный температурный градиент; Т0 - температура на уровне земли; Н - барометрическая высота; T - температура наружного воздуха.
Причем скорость ее изменения связана через градиент высоты:

Известно, что высота связана с барометрическим давлением, которое входит в уравнение состояния газа:

где g - ускорение свободного падения; R - универсальная газовая постоянная; TH - температура воздуха на высоте полета. Отсюда следует, что плотность является интегральным параметром, зависящим как от давления, так и от температуры.
Тогда барометрическую зависимость плотности по высоте можно представить следующим образом:

Получение информации о высоте можно осуществить на основе зависимости:

продифференцировав которую по времени можно получить информацию по вертикальной скорости Vy=dH/dt. Обозначено: ρ0, Т0 - соответственно плотность и температура на уровне земли; γ, b0 - паспортные параметры пневмоэлектрического преобразователя, соответственно коэффициент анемочувствительности и начальное значение коэффициента рассеяния мощности АЧЭ пневмоэлектрического преобразователя.
Реализация этого алгоритма осуществляется с помощью введенного блока 6 формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции.
Таким образом, введение в систему блока пневмокоммутации и блока формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции позволяет существенно уменьшить погрешности измерения высотно-скоростных параметров вертолета, обусловленных неидентичностью (разбросом) и нестабильностью характеристик элементов струйно-конвективных измерительных каналов, что особенно важно в области малых скоростей полета. Применение схемы управления периодичностью автокоррекции сокращает количество подстроек и позволяет существенно уменьшить динамические погрешности и обеспечить высокую точность работы системы воздушных сигналов вертолета в тяжелых условиях реального полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИЗМЕРЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477862C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ | 1987 |
|
SU1568729A1 |
| ВИХРЕВОЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2556760C1 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1559894A1 |
Изобретение относится к устройствам для измерения воздушных сигналов вертолета. Система воздушных сигналов вертолета содержит многоканальный аэрометрический приемник, имеющий 2n трубок полного давления и 2n приемных отверстий статического давления, выходы 2n трубок полного давления сообщены пневмопроводами со входами пневмоэлектрических преобразователей с электроизмерительными схемами, которые подключены к мультиплексору, выход которого через последовательно соединенные АЦП и микропроцессор подключен к системе отображения информации, выход которой является выходом системы по высотно-скоростным параметрам. Система воздушных сигналов вертолета дополнительно содержит блок пневмокоммутации каналов полного давления, который сообщен на входах пневмопроводами с трубками полного давления, и блок формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции, сообщенный на пневматическом входе пневмопроводом с 2n приемными отверстиями статического давления, первый и второй выходы которого соединены с мультиплексором, третий его выход - со входом системы отображения информации, а четвертый - с электрическим входом блока пневмокоммутации каналов полного давления. Технический результат - существенное уменьшение погрешности измерения высотно-скоростных параметров вертолета, что особенно важно в области малых скоростей полета. 5 з.п. ф-лы, 3 ил.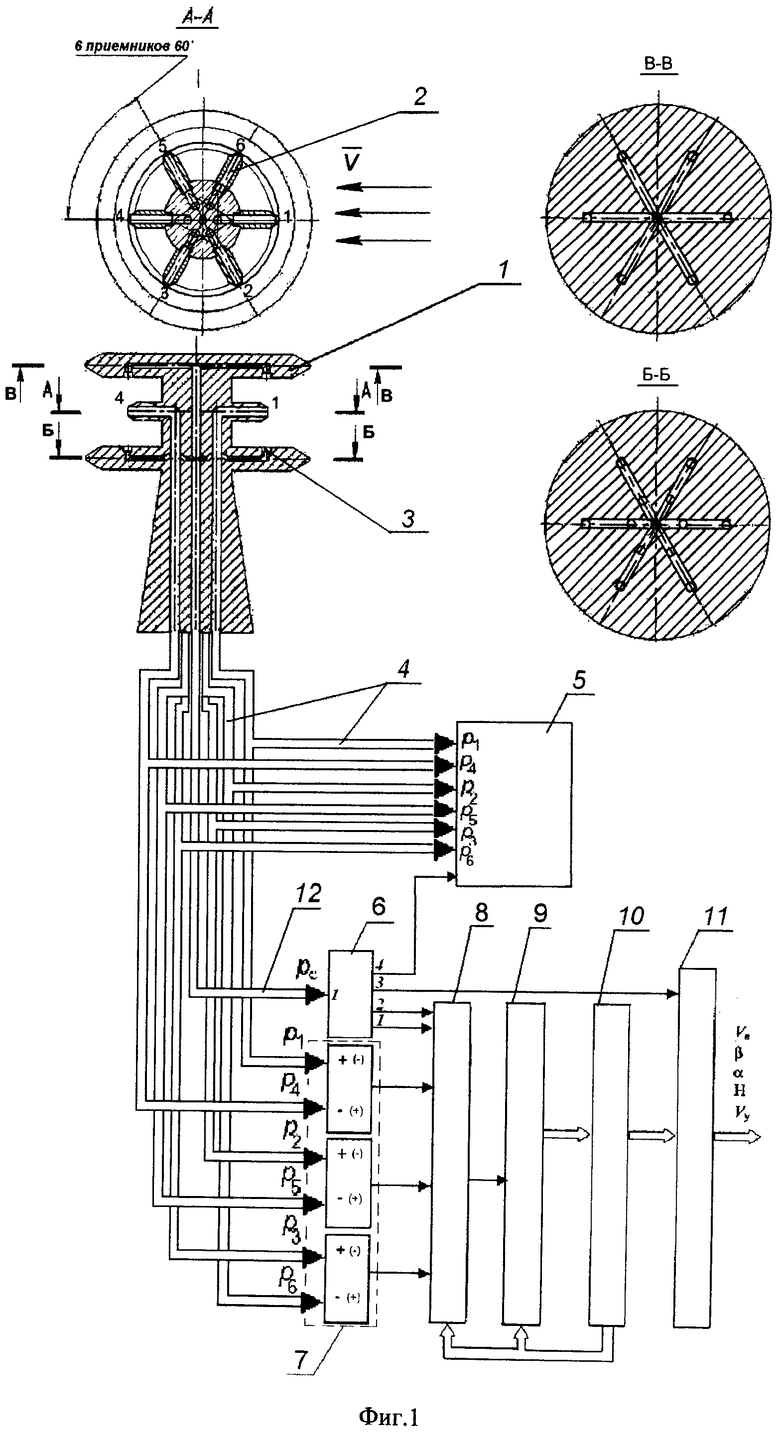
1. Система воздушных сигналов вертолета, содержащая многоканальный аэрометрический приемник, имеющий 2n трубок полного давления и 2n приемных отверстий статического давления, выходы 2n трубок полного давления сообщены пневмопроводами со входами пневмоэлектрических преобразователей с электроизмерительными схемами, которые подключены к мультиплексору, выход которого через последовательно соединенные АЦП и микропроцессор подключен к системе отображения информации, выход которой является выходом системы по высотно-скоростным параметрам, отличающаяся тем, что она содержит блок пневмокоммутации каналов полного давления, который сообщен на входах пневмопроводами с трубками полного давления, и блок формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции, сообщенный на пневматическом входе пневмопроводом с 2n приемными отверстиями статического давления, первый и второй выходы которого соединены с мультиплексором, третий его выход - со входом системы отображения информации, а четвертый - с электрическим входом блока пневмокоммутации каналов полного давления.
2. Система воздушных сигналов вертолета по п.1, отличающаяся тем, что блок пневмокоммутации каналов полного давления состоит из 2n автономных каналов электропневмоклапана, выходы которых сообщены между собой, а электрический вход электропневмоклапана является управляющим входом блока пневмокоммутации каналов полного давления.
3. Система воздушных сигналов вертолета по п.1, отличающаяся тем, что блок формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции состоит из пневмомодуля формирования первичного сигнала по плотности и электронного модуля, состоящего из схемы автокоррекции и схемы управления периодичностью автокоррекции, при этом пневматический вход блока формирования первичных информативных сигналов по высотно-скоростным параметрам и сигнала управления периодичностью автокоррекции является входом пневмомодуля формирования первичного сигнала по плотности, первый выход по плотности и температуре и второй выход по температуре которого соединены соответственно с первым и вторым входами схемы автокоррекции, первый, второй и третий выходы которой соответственно являются выходами по высоте, вертикальной скорости и режиму работы, а четвертый выход по плотности соединен с первым и вторым входами схемы управления периодичностью автокоррекции, выход которой является управляющим выходом, и соединен с третьим управляющим входом схемы автокоррекции.
4. Система воздушных сигналов вертолета по п.3, отличающаяся тем, что пневмомодуль формирования первичного сигнала по плотности содержит двухтактный микронагнетатель, пневматическим входом которого является вход по статическому давлению пневмомодуля формирования первичного сигнала по плотности, который управляется генератором привода нагнетателя, и соединен пневмопроводами с измерительным и компенсационным анемочувствительными элементами, которые включены в свои электроизмерительные схемы, и выходы которых соответственно подключены к первому выходу по плотности и температуре и второму выходу по температуре пневмомодуля.
5. Система воздушных сигналов вертолета по п.3, отличающаяся тем, что схема автокоррекции содержит дифференциальный усилитель, первый вход которого соединен со входом по плотности и температуре, а второй его вход соединен через первый вход ключа со входом по температуре, при этом второй вход ключа соединен с имитатором, причем дифференциальный усилитель последовательно соединен через фильтр нижних частот с первым входом корректора мультипликативной погрешности, второй вход которого соединен с первым входом дифференциального усилителя, а выход связан с четвертым выходом по плотности и с первым входом схемы коррекции остаточной аддитивной погрешности, выход которой соединен через компаратор со вторым управляющим входом реверсивного счетчика, счетный вход которого соединен с генератором счетных импульсов, первый выход реверсивного счетчика соединен через цифро-аналоговый преобразователь со вторым входом схемы коррекции остаточной аддитивной погрешности, второй выход является выходом по сигналу, отражающему режим работы системы, а первый управляющий вход реверсивного счетчика соединен с третьим управляющим входом схемы автокоррекции, с которым также соединен вход коммутатора, выход которого соединен с управляющим входом ключа, причем выход схемы коррекции остаточной аддитивной погрешности соединен с устройством обработки и формирования выходных сигналов системы, выход которого является выходом по высоте, и соединен со входом дифференциатора, выход которого является выходом по вертикальной скорости.
6. Система воздушных сигналов вертолета по п.3, отличающаяся тем, что схема управления периодичностью автокоррекции содержит дифференцирующий и масштабирующий преобразователи, входы которых соответственно подключены к первому и второму входам по плотности, при этом выходы дифференцирующего и масштабирующего преобразователей подключены ко входам сумматора, выход которого соединен с первым входом сравнивающего устройства, а второй его вход соединен с задатчиком предельно допустимой скорости изменения погрешности, причем выход сравнивающего устройства соединен со входом генератора управляющих сигналов, выход которого является управляющим выходом схемы управления периодичностью автокоррекции.
| Двухтактный двигатель внутреннего горения с продувкой через поршень из кривошипной камеры | 1937 |
|
SU55145A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Вытяжной штамп | 1950 |
|
SU86752A1 |
| Устройство для измерения плотности жидкости | 1978 |
|
SU763743A1 |

