Изобретение относится к приборостроению и предназначено для использования в системах информационного обеспечения полетов винтокрылых летательных аппаратов (ЛА), преимущественно вертолетов.
Целью изобретения является повышение надежности и расширение информативности.
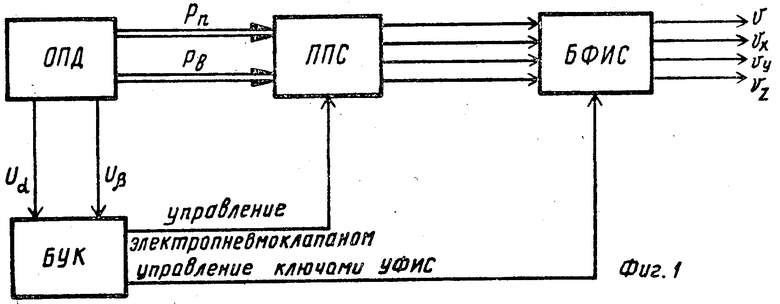
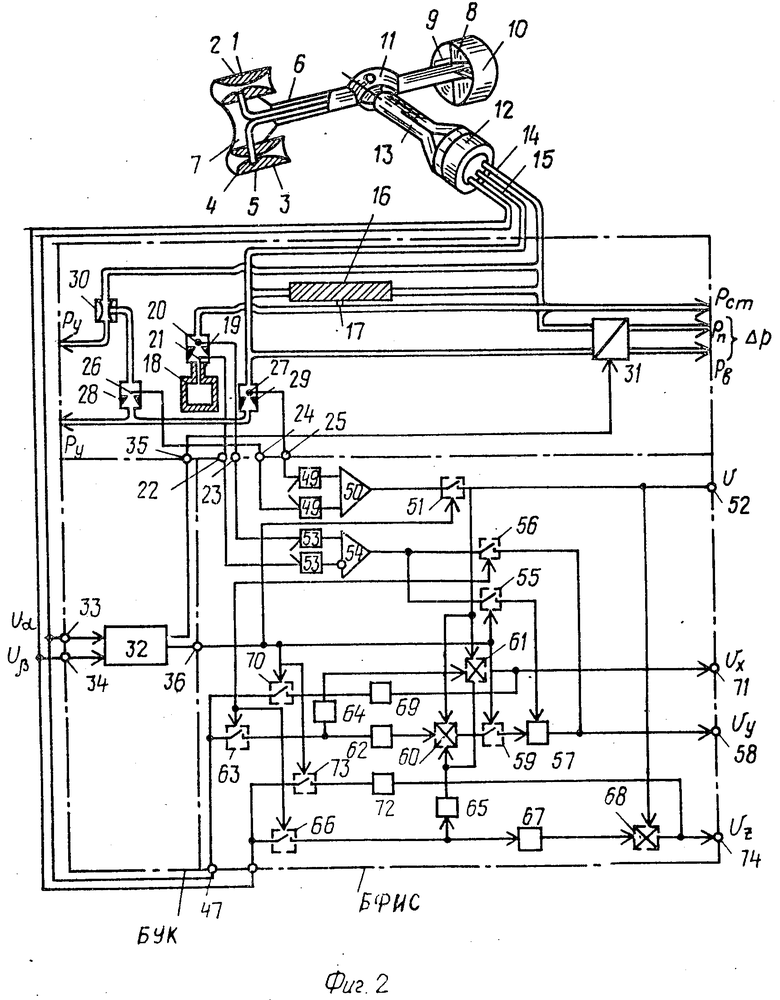
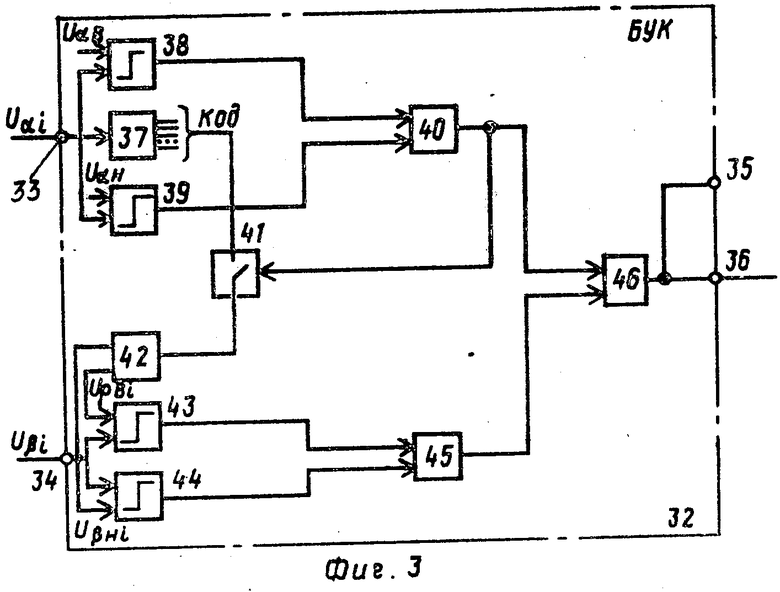
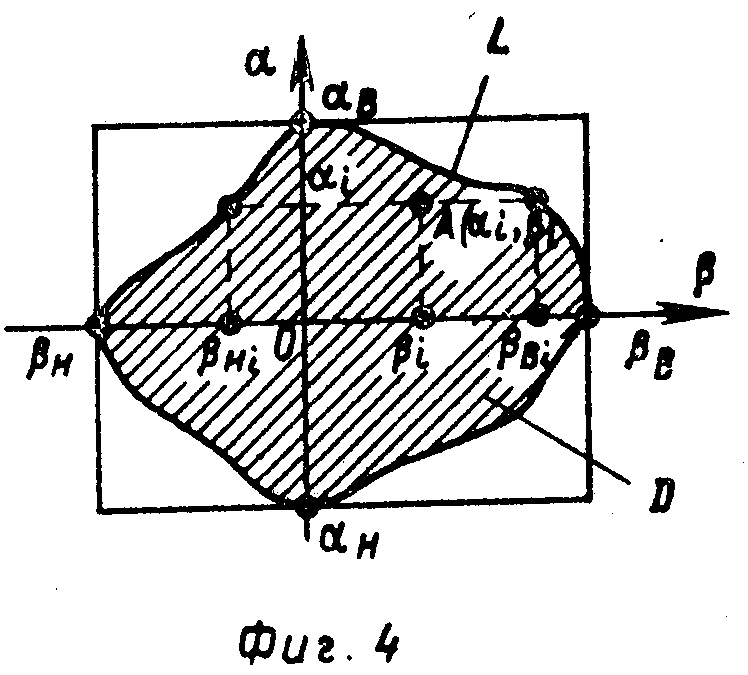
На фиг.1 представлена обобщенная функциональная схема измерителя аэрометрических параметров; на фиг.2 - полная функциональная схема; на фиг.3 - структурная схема блока управления и коммутации; на фиг.4 - графическая интерпретация алгоритма режима работы блока управления и коммутации.
Измеритель аэрометрических параметров (см. фиг.1) состоит из ориентируемого приемника давления (ОПД), преобразователя пневматических сигналов (ППС), блока формирования информативных сигналов (БФИС), блока управления и коммутации (БУК).
Ориентируемый приемник давления (фиг.2) содержит две проточные трубки: проточную трубку 1, имеющую приемные отверстия 2 дросселированного давления, и проточную трубку 3 с приемной трубкой 4 полного давления, сообщающейся с осредняющейся полостью 5. Проточные трубки 1, 3 разнесены относительно оси симметрии штанги 6 на одинаковые расстояния и стянуты пилоном 7 в плоскости, совпадающей по направлению с вертикальной пластиной 8 (9 - горизонтальная пластина) аэродинамического стабилизатора 10.
Карданный подвес 11 позволяет ориентироваться приемнику давления в двух взаимно ортогональных плоскостях. Выходы узла 12 съема сигналов, установленного на опоре 13, по полному и дросселированному давлению через пневматические каналы 14, 15 связаны с входами капиллярного делителя давления 16, отвод 17 которого сообщен с выходом преобразователя пневматических сигналов по статическому давлению и с глухой камерой 18 через первый струйный преобразователь расхода 19 с двумя анемочувствительными элементами 20, 21 по каналу вертикальной составляющей вектора воздушной скорости, соединенных с двумя входами блока формирования информативных сигналов 22, 23. Входы 24, 25 этого блока соединены с анемочувствительными элементами 26, 27 второго и третьего струйных преобразователей 28, 29 расхода по каналу воздушной скорости v, входы которых сообщены с источником условно-статического давления Ру. Выход второго преобразователя 28 соединен с первым входом струйного инвертора 30, второй вход которого сообщен с каналом полного давления и через первый вход электропневмоклапана 31 связан с выходом преобразователя пневматических сигналов по полному давлению Рп, при этом выход струйного инвертора сообщен с источником условно-статического давления. Выход третьего преобразователя 29 непосредственно связан с каналом дросселированного давления и через второй вход электропневмоклапана 31 сообщен с выходом преобразователя пневматических сигналов по дросселированному давлению.
Электропневмоклапан 31 управляется блоком управления и коммутации 32.
Блок управления и коммутации содержит входы 33, 34 по угловому положению приемника давления, выход 35 по управлению электропневмоклапаном и выход 36, с которого происходит управление ключами блока формирования информативных сигналов.
Блок управления и коммутации (см. фиг.3) состоит из каналов оценки положения приемника давления по двум угловым координатам α и β, содержащих по два компаратора, три элемента И, аналого-цифровой преобразователь (АЦП) и формирователь границ угла β. Вход канала оценки по угловой координате α соединен с входом АЦП 37 и двумя компараторами 38, 39 этого канала, выходы которых соединены с первым и вторым входами элемента И 40 канала оценки по угловой координате α, выход которого соединен с управляющим входом ключа 41, соединяющего АЦП с формирователем 42 границ угла β. Вход канала оценки по угловой координате β соединен с двумя первыми входами компараторов 43, 44, вторые входы которых соединены с выходами формирователя 42 границ угла β. Выход компараторов 43, 44 соединен с первым и вторым входами элемента И 45 этого канала. Выходы элементов И обоих каналов соединены с первым и вторым входами выходного элемента И 46, выход которого является выходом блока управления и коммутации. Входы блока связаны с входами 47, 48 блока формирования информативных сигналов по угловому положению приемника давления, которые в свою очередь связаны с соответствующими выходами узла съема сигналов.
Блок формирования информативных сигналов состоит из электрических цепей формирования воздушной скорости v и ее вертикальной vy, продольной vx и боковой vz составляющих с содержащимися в них ключами, соединенными с выходом блока управления и коммутации.
Входы электроизмерительных схем 49 электрической цепи формирования воздушной скорости v соединены с соответствующими входами блока формирования информативных сигналов, а их выходы соединены с входами суммирующего усилителя 50, выход которого через нормально разомкнутый ключ 51 цепи v связан с выходом 52 блока формирования информативных сигналов по v.
Входы электроизмерительных схем 53 цепи формирования vy соединены с соответствующими входами блока формирования информативных сигналов, а их выходы соединены с входами дифференциального усилителя 54, выход которого соединен с двумя ключами 55, 56 цепи vy, первый из которых, нормально разомкнутый, соединен с первым входом блока 57 статистической обработки, выход которого соединен с вторым нормально замкнутым ключом, и выходом 58 блока формирования информативных сигналов по vy.
Второй вход блока статистической обработки через третий нормально разомкнутый ключ 59 цепи формирования vy сообщен с выходом умножителя 60 цепи формирования vy, первый вход которого вместе с первым входом умножителя 61 цепи формирования сигнала по vx связан с выходом блока формирования информативных сигналов по цепи v, а второй вход - с выходом синусного преобразователя 62, вход которого через четвертый нормально разомкнутый ключ 63 цепи формирования vy соединен с входом по угловому положению приемника давления, а через косинусный преобразователь 64 - с вторым входом умножителя цепи vz и третий вход связан с выходом косинусного преобразователя 65, вход которого соединен через пятый нормально разомкнутый ключ 66 цепи формирования vx с входом по угловому положению приемника давления, а через синусный преобразователь 67 связан с вторым входом умножителя 68 цепи vх и непосредственно с третьим входом умножителя цепи vх, выход которого сообщен через функциональный преобразователь 69 и нормально замкнутый ключ 70 цепи формирования vх с входом по угловому положению ориентируемого приемника давления и непосредственно с выходом 71 блока формирования информативных сигналов по цепи vх.
Первый вход умножителя цепи vz связан с выходом блока формирования информативных сигналов по цепи v, а его выход сообщен через функциональный преобразователь 72 и нормально замкнутый ключ 73 цепи формирования vz с входом по угловому положению приемника давления и непосредственно с выходом 74 по цепи vz.
Измеритель аэрометрических параметров работает в двух режимах измерения: режим 1 измерения при нахождении ориентируемого приемника давления внутри вихревой колонны, режим 2 измерения, когда приемник давления находится вне вихревой колонны.
Идентификация режима измерения осуществляется посредством оценки с помощью блока управления и коммутации углового положения приемника давления, характеризующегося углами α, β. Для каждого типа винтокрылых ЛА и для конкретного места установки ориентируемого приемника давления можно получить по результатам летного и аэродинамического эксперимента множество значений α и β, при которых приемник давления находится в створе вихревой колонны. Если это множество значений α и β перенести в прямоугольную систему координат α, β, то получим область D (см. фиг.4), ограниченную замкнутой линией α, которая разделяет все пространство значений α и β на две области, соответствующие двум режимам измерения, когда ориентируемый приемник давления находится внутри или вне вихревой колонны.
Таким образом, в основе принципа работы блока управления и коммутации лежит оценка: где находится точка А текущих значений αi, βi, вне или внутри области D. Напряжения U , U
, U , пропорциональные соответственно текущим значениям U
, пропорциональные соответственно текущим значениям U , U
, U , получаемым на выходе узла 12 съема сигналов, подаются на вход блока управления и коммутации. При этом напряжение U
, получаемым на выходе узла 12 съема сигналов, подаются на вход блока управления и коммутации. При этом напряжение U , пропорциональное текущему значению αi, сравнивается на компараторах 38, 39 с эталонными значениями (установками) U
, пропорциональное текущему значению αi, сравнивается на компараторах 38, 39 с эталонными значениями (установками) U и U
и U , соответствующими граничным значениям αв, αн, определенным при β=0 (по фиг.4). В случае выполнения неравенства U
, соответствующими граничным значениям αв, αн, определенным при β=0 (по фиг.4). В случае выполнения неравенства U ≅ U
≅ U ≅ U
≅ U оба компаратора 38, 39 срабатывают, что приводит к срабатыванию связанного с ними элемента И 40, который, сработав, выдает сигнал, соответствующий логической "1", на первый вход элемента И 46, а также сигнал команды на замыкание ключа 41, через который на вход формирователя 42 границ угла β подается цифровой сигнал с АЦП 37, который пропорционален текущему значению U
оба компаратора 38, 39 срабатывают, что приводит к срабатыванию связанного с ними элемента И 40, который, сработав, выдает сигнал, соответствующий логической "1", на первый вход элемента И 46, а также сигнал команды на замыкание ключа 41, через который на вход формирователя 42 границ угла β подается цифровой сигнал с АЦП 37, который пропорционален текущему значению U . При этом на выходе формирователя 42 формируются два эталонных значения напряжения U
. При этом на выходе формирователя 42 формируются два эталонных значения напряжения U , U
, U , соответствующих граничным значениям угла (верхнее
, соответствующих граничным значениям угла (верхнее  и нижнее
и нижнее  ), отвечающим текущему значению βi.
), отвечающим текущему значению βi.
Напряжение U , пропорциональное текущему значению βi, сравнивается на входах компараторов 43, 44 с эталонными напряжениями U
, пропорциональное текущему значению βi, сравнивается на входах компараторов 43, 44 с эталонными напряжениями U U
U , соответствующими своим граничным значениям
, соответствующими своим граничным значениям  ,
,  . В случае выполнения неравенства U
. В случае выполнения неравенства U U
U ≅ U
≅ U , оба компаратора 43, 44 срабатывают, что приводит к срабатыванию элемента И 45, на выходе которого появляется сигнал, соответствующий логической "1". Этот сигнал поступает на второй вход элемента И 46, который, сработав, выдает управляющий сигнал, обеспечивающий состояние ключей 51, 55, 56, 59, 63, 66, 70, 73, необходимых для работы измерителя в режиме 1, что соответствует режиму околонулевых скоростей (как показано на фиг.2).
, оба компаратора 43, 44 срабатывают, что приводит к срабатыванию элемента И 45, на выходе которого появляется сигнал, соответствующий логической "1". Этот сигнал поступает на второй вход элемента И 46, который, сработав, выдает управляющий сигнал, обеспечивающий состояние ключей 51, 55, 56, 59, 63, 66, 70, 73, необходимых для работы измерителя в режиме 1, что соответствует режиму околонулевых скоростей (как показано на фиг.2).
В случае нарушения одного из неравенств, характеризующих нахождение точки А ( αi, βi) внутри области D, на выходе блока управления и коммутации сигнал управления соответствует уровню логического "0", что приводит к соответствующей коммутации ключей 51, 55, 56, 59, 63, 66, 70, 73, а следовательно, к переходу работы измерителя в режим 2, характеризующий режим больших скоростей.
Режим 1. В этом режиме мерой составляющих вектора воздушной скорости vx, vz являются углы отклонения продольной оси приемника давления в связной системе координат, определяемые направлением вектора результирующей воздушной скорости  , положение которого относительно фюзеляжа зависит от направления и величины поступательной скорости vnЛА. На режиме околонулевых скоростей приемник давления за счет аэродинамического стабилизатора ориентирован по направлению вектора результирующей воздушной скорости
, положение которого относительно фюзеляжа зависит от направления и величины поступательной скорости vnЛА. На режиме околонулевых скоростей приемник давления за счет аэродинамического стабилизатора ориентирован по направлению вектора результирующей воздушной скорости  , определяющейся векторной суммой поступательной скорости ЛА
, определяющейся векторной суммой поступательной скорости ЛА  и вектора скорости индуктивного потока
и вектора скорости индуктивного потока  , образованного вследствие работы несущей системы ЛА.
, образованного вследствие работы несущей системы ЛА.
Напряжения U , U
, U , пропорциональные текущим значениям αi, βi, с узла 12 съема сигналов поступают на вход блока управления и коммутации, группа ключей которого 56, 70, 73 замкнута, а группа ключей 51, 55, 59, 63, 66 разомкнута. Ключ 51 канала воздушной скорости разомкнут, так как на режиме околонулевых скоростей значение вектора скорости результирующего воздушного потока
, пропорциональные текущим значениям αi, βi, с узла 12 съема сигналов поступают на вход блока управления и коммутации, группа ключей которого 56, 70, 73 замкнута, а группа ключей 51, 55, 59, 63, 66 разомкнута. Ключ 51 канала воздушной скорости разомкнут, так как на режиме околонулевых скоростей значение вектора скорости результирующего воздушного потока  близко к значению вектора скорости индуктивного потока
близко к значению вектора скорости индуктивного потока  . Через замкнутые ключи 70, 73 соответственно каналов vх, vz электрические сигналы U
. Через замкнутые ключи 70, 73 соответственно каналов vх, vz электрические сигналы U , U
, U поступают на функциональные преобразователи 69, 72, где формируются сигналы vx = fx(U
поступают на функциональные преобразователи 69, 72, где формируются сигналы vx = fx(U ); vz = fz(U
); vz = fz(U ), которые следуют на выходы 71, 74 блока формирования информативных сигналов. Пневматические сигналы с каналов полного 14 и дросселированного 15 давлений поступают на капиллярный делитель 16 давления с отводом 17 по статическому давлению Рст, поступающему непосредственно на выход преобразователя пневматических сигналов потребителям информации по статическому давлению, а через преобразователь 19 расхода с двумя анемочувствительными элементами 20, 21 - на глухую - камеру 18. С анемочувствительных элементов 20, 21 через входы 22, 23 блока формирования информативных сигналов сигналы поступают на электроизмерительные схемы 53 и далее на входы дифференциального усилителя 54 канала измерения vy, с выхода которого через нормально замкнутый ключ 56 информации по vy поступает на выход блока формирования информативных сигналов по цепи формирования vy.
), которые следуют на выходы 71, 74 блока формирования информативных сигналов. Пневматические сигналы с каналов полного 14 и дросселированного 15 давлений поступают на капиллярный делитель 16 давления с отводом 17 по статическому давлению Рст, поступающему непосредственно на выход преобразователя пневматических сигналов потребителям информации по статическому давлению, а через преобразователь 19 расхода с двумя анемочувствительными элементами 20, 21 - на глухую - камеру 18. С анемочувствительных элементов 20, 21 через входы 22, 23 блока формирования информативных сигналов сигналы поступают на электроизмерительные схемы 53 и далее на входы дифференциального усилителя 54 канала измерения vy, с выхода которого через нормально замкнутый ключ 56 информации по vy поступает на выход блока формирования информативных сигналов по цепи формирования vy.
Таким образом режим 1 характеризуется следующим алгоритмом:

 где α, β - углы отклонения продольной оси ориентируемого приемника давления;
где α, β - углы отклонения продольной оси ориентируемого приемника давления;
vx, vy, vz - соответствующие составляющие вектора воздушной скорости в связной системе координат;
Δ Р - информативный перепад давления;
Кvy - коэффициент пропорциональности по вертикальной составляющей воздушной скорости;
Рот - статическое давление с отвода делителя давления.
Режим 2. В этом режиме составляющие вектора воздушной скорости ЛА находятся путем того, что блок формирования информативных сигналов обеспечивает реализацию следующего алгоритма без учета углового положения плоскости диска несущего винта относительно фюзеляжа:
В данном режиме за счет работы блока управления и коммутации ключи 51, 55, 59, 63, 66 замкнуты. Кроме того, в блок управления и коммутации подается управляющий сигнал на срабатывание электропневмоклапана 31, и пневматические сигналы по полному Рп и дросселированному Рв давлениям поступают к другим потребителям информации по динамическому напору с соответствующих выходов преобразователя пневматических сигналов.
Информация по воздушной скорости v измеряется следующим образом. Пневматический сигнал по каналу 14 полного давления проходит через струйный инвертор 30, с которого в критическом сечении отбирается инвертированное давление, вызывающее протекание воздуха через струйный преобразователь 28 с анемочувствительным элементом 26, массовый расход которого пропорционален полному давлению Рп. Пневматический сигнал, передаваемый по каналу 15 дросселированного давления, вызывает перетекание воздуха через преобразователь 29 с анемочувствительным элементом 27, массовый расход которого пропорционален дросселированному давлению Рв.
Электрические сигналы с анемочувствительных элементов 26, 27 через соответствующие входы 24, 25 поступают на электроизмерительные схемы 49 и далее на суммирующий усилитель 50, с выхода которого информация через замкнутый ключ 51 поступает на выход по цепи v блока формирования информативных сигналов.
Информация по продольной составляющей воздушной скорости формируется следующим образом. На первый вход умножителя цепи поступает информация по воздушной скорости v с выхода 52, на второй его вход с входа блока формирования информативных сигналов по угловому положению приемника давления U  через замкнутый ключ 63 и косинусный преобразователь 64 поступает информация по cos α, а на третий его вход поступает информация по cos β, сформированная путем поступления информации U
через замкнутый ключ 63 и косинусный преобразователь 64 поступает информация по cos α, а на третий его вход поступает информация по cos β, сформированная путем поступления информации U  с входа блока формирования информативных сигналов по угловому положению приемника давления через замкнутый ключ 66 и косинусный преобразователь 65. В результате на выходе умножителя имеем информацию по vх, которая поступает на выход 71.
с входа блока формирования информативных сигналов по угловому положению приемника давления через замкнутый ключ 66 и косинусный преобразователь 65. В результате на выходе умножителя имеем информацию по vх, которая поступает на выход 71.
Информация по вертикальной составляющей воздушной скорости vхформируется следующим образом. На первый вход умножителя 60 цепи vyпоступает информация по воздушной скорости v с выхода 52 по v блока формирования информативных сигналов, а на второй его вход поступает информация по sin β , сформированная синусным преобразователем 62 по сигналу U  , поступающему с входа 47 по угловому положению приемника давления через замкнутый ключ 63 и на третий вход умножителя 60 цепи vyпоступает информация по cos β, сформированная косинусным преобразователем 65, по поступающему с входа 48 сигналу U
, поступающему с входа 47 по угловому положению приемника давления через замкнутый ключ 63 и на третий вход умножителя 60 цепи vyпоступает информация по cos β, сформированная косинусным преобразователем 65, по поступающему с входа 48 сигналу U  по угловому положению приемника давления через замкнутый ключ 66. Таким образом, на выходе умножителя по цепи vy сформированный сигнал по vy через замкнутый ключ 59 поступает на вход блока 57 статистической обработки, на другой вход которого с цепи формирования vy через замкнутый ключ 55 поступает информация по измеренному значению vy. В блоке статистической обработки происходит осреднение информации по vy по двум значениям: измеренному и вычисленному значению vy.
по угловому положению приемника давления через замкнутый ключ 66. Таким образом, на выходе умножителя по цепи vy сформированный сигнал по vy через замкнутый ключ 59 поступает на вход блока 57 статистической обработки, на другой вход которого с цепи формирования vy через замкнутый ключ 55 поступает информация по измеренному значению vy. В блоке статистической обработки происходит осреднение информации по vy по двум значениям: измеренному и вычисленному значению vy.
Информация по боковой составляющей воздушной скорости vzформируется следующим образом. Сигнал U  с входа 48 блока формирования информативных сигналов через замкнутый ключ 66 поступает на синусный преобразователь 65, с выхода которого информация по sin β поступает на вход умножителя 60 по цепи vz, на другой вход которого поступает информация с выхода ключа 51 блока формирования информативных сигналов по воздушной скорости. Таким образом, на выходе умножителя 60 формируется сигнал по боковой составляющей вектора воздушной скорости vz, поступающей на выход 74 блока формирования информативных сигналов.
с входа 48 блока формирования информативных сигналов через замкнутый ключ 66 поступает на синусный преобразователь 65, с выхода которого информация по sin β поступает на вход умножителя 60 по цепи vz, на другой вход которого поступает информация с выхода ключа 51 блока формирования информативных сигналов по воздушной скорости. Таким образом, на выходе умножителя 60 формируется сигнал по боковой составляющей вектора воздушной скорости vz, поступающей на выход 74 блока формирования информативных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1559894A1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477862C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИНАМИКИ АТМОСФЕРЫ В ПРИЗЕМНОМ СЛОЕ | 2013 |
|
RU2548299C2 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И УГЛА СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1979 |
|
SU801712A1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
Изобретение относится к приборостроению и предназначено для использования в системах информационного обеспечения полетов винтокрылых летательных аппаратов, преимущественно вертолетов. Целью изобретения является повышение надежности и расширение информативности. Измеритель аэрометрических параметров работает при нахождении ориентируемого приемника давления (ОПД) внутри и вне вихревой колонны. Идентификация режима измерения осуществляется посредством оценки с помощью блока управления и коммутации углового положения ОПД, характеризующегося углами α и β, множество значений которых можно получить по результатам летного и аэродинамического экспериментов, при которых ОПД находится в створе вихревой колонны. 3 з.п.ф., 4 ил.
| J.Kaletka "Evaluation of the Hebicopter Jow Airspeed Sustem LASSIE", Journal of the American helicopter society, v.28, N 4, 1983, р.35-43. |
