(54) ЭЛЕКТРОДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬНО-ТРАНСФОРМАТОРНЫЙ АГРЕГАТ | 2012 |
|
RU2487454C1 |
| Электродвигатель | 1983 |
|
SU1127046A1 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |
| ТОРЦЕВАЯ АСИНХРОННАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2012 |
|
RU2522898C1 |
| Ротор асинхронного электродвигателя,создающего вращательное и поступательное движение | 1981 |
|
SU995219A1 |
| ТОРЦЕВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2046516C1 |
| ВОЛНОВОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2289186C2 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| Самотормозящийся асинхронный электродвигатель со сдвоенным короткозамкнутым ротором для привода поточных линий | 2017 |
|
RU2661641C1 |
| БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С ДИСКОВЫМ РОТОРОМ | 2004 |
|
RU2319279C2 |
1
Изобретение относится к области электрических машин и может быть использовано в электроприводах повышенной надежности, работаюш,их в условиях вакуума и высоких давлений, повышенных температур, в присутствии агрессивных сред и т. п.
Рационально использование двигателя в перемешивающих и вентиляторных устройствах, в устройствах звукозаписи и медицинском оборудовании.
Известны электродвигатели 1, содержашие статор и ротор, соединенные упругой связью с корпусом.
Недостаток этой конструкции состоит, во-первых, В.ТОМ, что ротор может совершать только колебательные, возвратно-поступательные движения, во-вторых, в наличии опоры в виде подшипника, что сужает функциональные возможности и обуславливает большие габариты двигателя.
Известен также электродвигатель 2, содержащий статор с обмоткой, установленный в корпусе, ротор осесимметричной формы из ферромагнитного материала, установленный на центральном стержне, который укреплен одним концом на корпусе с возможностью упругого смещения.
Недостатками такой конструкции являются значительная масса двигателя и плохие ус.човия пуска, что обусловлено, во-первых, неравномерностью воздушного зазора между статором и роторо.м, который эксцентрично смещен в рабочем положении. Такой неравномерный зазор приводит к увеличению намагничивающего тока и увеличению потерь в двигателе, а также к снижению момента двигателя. Для получения требуемого момента необходимого увеличивать размеры и массу двигателя. Во-вторых, при симметричном положении ротора, относительно статора пуск двигателя затруднен.
Целью изобретения являются снижение массы и улучшение условий пуска.
Это достигается тем, что ротор выполнен
5 в виде диска, центральный стержень укреплен на корпусе посредством регулируемого упругого элемента, статор выполнен из двухчастей, установленных по обе стороны диска, причем на торцовых поверхностях статора (или ротора) выполнены скосы, образующие конусный воздушный зазор.
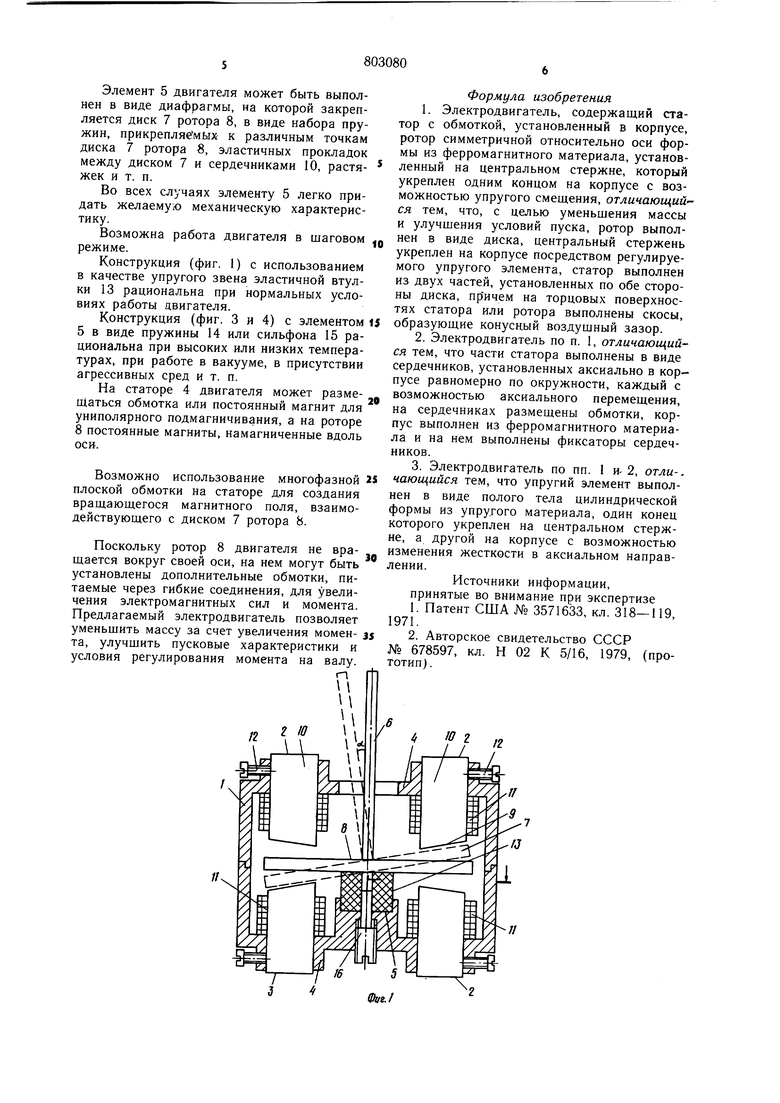
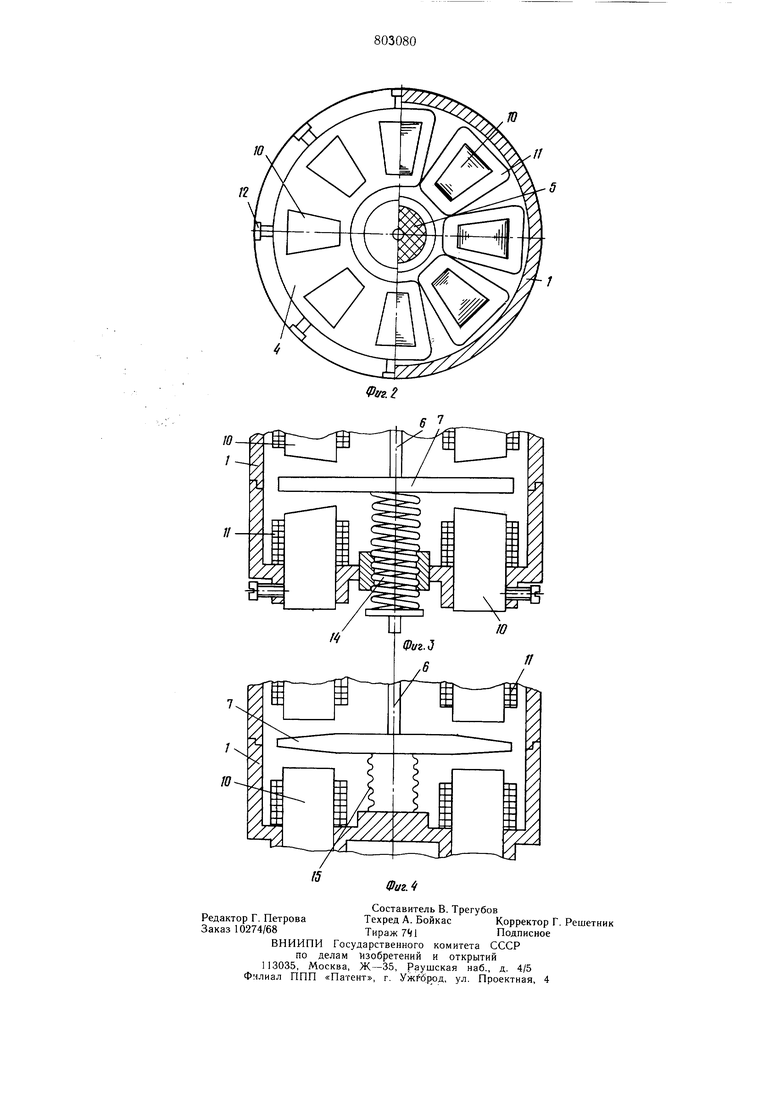
Для улучшения регулировочных свойств путем согласованной настройки упругих и магнитных сил. действующих на ротор. части статора могут быть выполнены в виде сердечников, установленных в корпусе равномерно по окружности и аксиально, каждый с возможностью аксиального перемещения, на сердечниках размещены обмотки, корпус выполнен из ферромагнитного материала и на нем выполнены фиксаторы сердечников. Упругий элемент выполнен в виде полого тела цилиндрической формы из упругого материала, один конец которого укреплен на центральном .стержне, а другой на корпусе с возможностью изменения жесткости в аксиальном направлении. На фиг. 1 представлен продольный разрез двигателя с упругим элементом в виде эластичной втулки; на фиг. 2 - продольный разрез двигателя с упругим звеном в виде пружины; на фиг. 3 - электродвигатель с ротором, у которого выполнены скосы, и с упругим звеном в виде сильфона. Двигатель содержит разъемныР корпус 1, в котором укреплены части 2. 3 стагоря 4. В корпусе 1 укреплен упругий элемент 5, который одним концом соединен с центральным стержнем 6. На стержне б жестко укреплен диск 7 ротора 8. К другому концу стержня 6 может быть подсоелинена на грузка. Торцовые поверхности 9 статора 4 (или ротора 8) могут быть выпо;1неи1л со скосами, образующими конусный во;.душный зазор.. Части 2 и 3 статора 4 .мсяут быть выполнены в виде сердечников iО, установленных в корпусе 1 равномерно по окружности и аксиально. На сердечниках 10 установлены об.мотки 11. Сердечники 0 имеют возможность аксиального перемещения и фиксации фиксаторами 12. Корпус 1 при этом должен быть выполнен из ферромагнитного материала. Элемент 5 может быть выполнен в виде полого тела цилиндрической формы из упругого материала, например в виде резиновой втулки 13, пружины 14, сильфона 15, один конец элемента 5 укреплен на корпусе 1, а другой соединен с центральным стержнем 6. Установленный на корпусе 1 конец элемента 5 имеет возможность изменения длины за счет поджатия, например винтом 16 или другим способом, что позволяет изменять жесткость элемента 5. Работает электродвигатель следующим образом. В обмотки 11 подается ток таким образом, что одновременно возбуждаются согласно включенные диаметрально противоположные обмотки 11, находящиеся по разные стороны диска 7. Возникающее при этом магнитное поле замыкается через сердечники 10 обомоток II, корпус 1 и диск 7. Под действием несимметричного магнитного тяжения диск 7 перекащивается, приближаясь к соответствующим верхнему и нижнему сердечникам 10. Стержень 6 наклоняется на некоторый угол с, по отнощению к оси, как показано пунктиром на фиг. 1. При последовательном возбуждении соседних пар диаметральных верхних и нижних обмоток 11 диск 7 будет соверщать периодические несимметричные смещения вдоль оси (каждая точка диска 7 будет колебаться в противофазе по отнощению к диаметрально противоположной симметричной точке). При этом ось диска 7 и,соответственно,стержень 6 соверщают движение прецессирующего характера. Свободный конец стержня 6 описывает окружности и приводит во вращение механическую нагрузку, сопряженную с концом стержня 6. Для увеличения силы магнитного тяжения на ротор 8 зазор между смещенным диском 7 и обращенными к нему торцами ближайщих сердечников 10 делается равномерным за счет либо- скоса торцов сердечников 10 (фиг. 1 и 3) либо скоса краев диска 7 (фиг. 4). Величина угла скоса имеет порядок. Таким образом, двигатель развивает механическую энергию вращения без использования подшипников и контактов. Однако по сравнению с прототипом, он во-первы-х, развивает больщий момент благодаря равномерному зазору между торцами сердечников 10 и диском 7 в рабоче.м положении. Во-вторых, за счет регулирования жесткости упругого звена он допускает простое регулирование угла перекоса Д, и регулирование выходного момента и амплитуды кругового движения свободного конца стержня 6, являющихся выходными параметрами двигателя. В-третьих, в предлагаемом двигателе легко осуществляется запуск при любом начальном положении ротора 8 благодаря несимметричному магнитному тяжению, создаваемому сердечниками 10 и обмотками И на статоре 4, Наиболее рациональный режим работы (без трения) двигателя реализуется при отсутствии касания диском 7 торцов сердечников 10 с сохранением минимально допустимого конструктивного зазора между ними. Такой режим обеспечивается путем регулирования жесткости элемента 5 и положения сердечников 10. Регулирование и настройка могут осуществляться во время работы двигателя. Если двигатель работает с касанием диска 7 ротора 8 торцов стержней 10, целесообразно поместить на этих торцах тонкие антифрикционные прокладки (например фторопластовые). Возможно улучшение характеристик двигателя за счет использования резонансных эффектов, роль которых благодаряналичию элемента 5 может быть значительной. Элемент 5 двигателя может быть выполнен в виде диафрагмы, на которой закрепляется диск 7 ротора 8, в виде набора пружин, прикрепляемых к различным точкам диска 7 ротора 8, эластичных прокладок между диском 7 и сердечниками 10, растяжек и т. п. Во всех случаях элементу 5 легко придать желаемую механическую характеристику. Возможна работа двигателя в шаговом режиме. Конструкция (фиг. 1) с использованием в качестве упругого звена эластичной втулки 13 рациональна при нормальных условиях работы цвигателя. Конструкция (фиг. 3 и 4) с элементом 5 в виде пружины 14 или сильфона 15 рациональна при высоких или низких температурах, при работе в вакууме, в присутствии агрессивных сред и т. п. На статоре 4 двигателя может размещаться обмотка или постоянный магнит для униполярного подмагничивания, а на роторе 8 постоянные магниты, намагниченные вдоль оси. Возможно использование многофазной плоской обмотки на статоре для создания вращающегося магнитного поля, взаимодействующего с диском 7 ротора 8. Поскольку ротор 8 двигателя не вращается вокруг своей оси, иа нем могут быть установлены дополнительиые обмотки, питаемые через гибкие соединения, для увеличения электромагнитных сил и момента. Предлагаемый электродвигатель позволяет уменьшить массу за счет увеличения момента, улучщить пусковые характеристики и условия регулирования момента на валу. Формула изобретения 1.Электродвигатель, содержащий статор с обмоткой, установленный в корпусе, ротор симметричной относительно оси формы из ферромагнитного материала, установленный на центральном стержне, который укреплен одним концом на корпусе с возможностью упругого смещения, отличающийся тем, что, с целью уменьшения массы и улучшения условий пуска, ротор выполнен в виде диска, центральный стержень укреплен на корпусе посредством регулируемого упругого элемента, статор выполнен из двух частей, установленных по обе стороны диска, причем на торцовых поверхностях статора или ротора выполнены скосы, образующие конусный воздушный зазор. 2.Электродвигатель по п. I, отличающийся тем, что части статора выполнены в виде сердечников, установленных аксиально в корпусе равномерно по окружности, каждый с возможностью аксиального перемещения, на сердечниках размещены обмотки, корпус выполнен из ферромагнитного материала и на нем выполнены фиксаторы сердечников. 3.Электродвигатель по пп. 1 и-2, отли-. чающийся тем, что упругий элемент выполнен в виде полого тела цилиндрической формы из упругого материала, один конец которого укреплен на центральном стержне, а другой на корпусе с возможностью изменения жесткости в аксиальном направлении. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3571633, кл. 318-119, 1971. 2.Авторское свидетельство СССР № 678597, кл. Н 02 К 5/16, 1979, (прототип) .
