Изобретение относится к области электромашиностроения и может быть использовано в электроприводах общепромышленных механизмов, в частности, как базовая часть бесконтактного двигателя постоянного тока транспортных установок, для поддержания устойчивой регулируемой частоты вращения в широком диапазоне скоростей.
Известна бесконтактная синхронная электрическая машина с осевым возбуждением, в которой неподвижный торцовый якорь выполнен из отдельных магнитно не связанных шихтованных стержней, в сквозные пазы между которыми уложена обмотка якоря. С двух сторон к якорю через рабочие зазоры примыкает ротор в виде двух немагнитных дисков с ферромагнитными полюсами. Диски укреплены на полом валу, внутри которого находится неподвижный токопровод возбуждения, а вал соединен с нагрузкой через редукторную передачу или с помощью шкива (см. Бут Д.А. Бесконтактные электрические машины. М., "Высшая школа", 1990, с.153).
Недостатки известной конструкции связаны с повышенными потерями в обмотке возбуждения и усложненным способом ее намотки. Кроме того, необходимость боковой передачи механического момента ограничивает возможность ее использования.
Наиболее близким к заявляемому изобретению является индукторная электрическая машина с двойным аксиальным зазором и якорной обмоткой кольцевого типа, в которой статор содержит витой ферромагнитный сердечник с пазами для укладки кольцевой обмотки якоря, а обмотка возбуждения тороидального вида расположена во внутренней полости витого сердечника. С двух сторон к сердечнику через рабочие зазоры примыкает ротор, выполненный в виде двух ферромагнитных дисков, объединенных общим стальным цилиндром (сердечник ротора). В области сердечника якоря каждый из дисков содержит полюсы в виде ряда статоров (звездочек), причем полюсы одной звездочки сдвинуты по окружности относительно полюсов другой на одно полюсное деление (см. Бут Д.А. Бесконтактные электрические машины. М., "Высшая школа", 1990, с.153).
Конструкция данной электрической машины выбрана прототипом.
Прототип и заявляемое изобретение имеют следующие общие признаки:
- статор с радиальными пазами для укладки обмотки якоря,
- дисковый ротор,
- тороидальная обмотка возбуждения.
Недостатком прототипа следует считать:
- наличие массивного сердечника ротора, который необходим для замыкания полного магнитного потока электрической машины;
- наличие общего сердечника статора, магнитное насыщение которого ограничивает перегрузочную способность машины.
В основу изобретения поставлена задача создать бесконтактный двигатель постоянного тока с дисковым ротором, в котором за счет иного выполнения магнитной системы статора обеспечить возможность резкого ослабления реакции якоря двигателя, что приводит к повышению его перегрузочной способности и, соответственно, к повышению быстродействия в переходных режимах. При этом значительно уменьшается масса дискового ротора, упрощается технология изготовления двигателя, уменьшаются его осевые размеры, а конструктивная схема двигателя обеспечивает возможность модульного принципа его построения, т.е. последовательного чередования модуля якоря (зубцовая зона и секции обмотки) и модуля дискового ротора (немагнитный диск с ферромагнитными полюсами). Это значительно повышает удельное значение мощности момента.
Поставленная задача решена в конструкции бесконтактного двигателя постоянного тока с дисковым ротором, содержащим статор с радиальными пазами для укладки обмотки якоря, тороидальную обмотку возбуждения и дисковый ротор, тем, что статор выполнен из ряда отдельных магнитно не связанных ферромагнитных стержней П-образной формы, расположенных симметрично относительно ферромагнитных полюсов дискового ротора, основание которого выполнено из немагнитного материала и жестко соединено с валом, а концевые части радиально ориентированных стержней П-образной формы закреплены в немагнитных торцевых щитах статора, причем секции обмотки якоря уложены в сквозные пазы между ферромагнитными стержнями-зубцами каждого из модулей якоря, при этом коммутация токов секций по сигналам датчика положения осуществляется полупроводниковым коммутатором.
Причинно-следственную связь между совокупностью заявленных признаков и достижением технического результата можно объяснить следующим.
В заявляемом бесконтактном двигателе постоянного тока с дисковым ротором (БДПТДР), в отличие от прототипа, нет массивного ферромагнитного сердечника ротора, что уменьшает массу вращающейся части двигателя, соответственно повышает его быстродействие. Отсутствие общего ярма якоря и ярма обмотки возбуждения обеспечивает путь замыкания магнитного потока МДС обмотки якоря только через боковые поверхности зубцов модуля якоря и воздушные промежутки между ними (пазы), имеющими малую магнитную проницаемость, чем обусловлено ограничение реакции якоря, возможность получения больших перегрузок по току, определяемых, в основном, условием отсутствия опрокидывания магнитного поля в рабочем воздушном зазоре, повышение перегрузочной способности БДПТДР улучшает динамические характеристики (ускорение, время пуска и торможение), что повышает производительность соответствующей промышленной установки, уменьшает потери электроэнергии в переходных режимах.
В свою очередь, ограничение реакции якоря наличием ряда воздушных промежутков (пазов) на пути замыкания магнитного потока МДС обмотки якоря обеспечивает возможность выбора величины рабочего воздушного зазора между модулем якоря и модулем дискового ротора на пути замыкания основного магнитного потока двигателя, только исходя из технологических возможностей обеспечения его минимального значения, чем обусловлено уменьшение как размеров катушек обмотки возбуждения, так и электрических потерь в них.
В предлагаемом двигателе достаточно просто реализуется модульный принцип построения современных специальных электродвигателей, при котором в аксиальном направлении чередуются два конструктивных элемента, например модуль якоря, изготовленный на основании немагнитного диска с радиально расположенными ферромагнитными стержнями, формирующими зубцовую зону, в пазах которой уложены секции обмотки якоря, и модуль дискового ротора, состоящий из немагнитного диска с ферромагнитными выступами-полюсами. Подобная конструктивная схема БДПТДР обеспечивает повышение удельных значений мощности и момента двигателя, что особенно проявляется при низких номинальных (безредукторных) частотах вращения, при значительном уменьшении трудоемкости его изготовления в целом.
Бесконтактный двигатель постоянного тока с дисковым ротором представлен на чертежах, где:
фиг.1 - конструктивная схема двигателя;
фиг.2 - двигатель, сечение А-А;
фиг.3 - двигатель, сечение В-В;
фиг.4 - модуль дискового ротора, аксонометрия;
фиг.5 - схема-развертка двигателя вдоль внешнего диаметра модуля якоря.
Бесконтактный двигатель постоянного тока с дисковым ротором содержит статор 1, состоящий из модулей якоря 2, 3, 4, 5, ротор 6, включающий в себя два модуля дискового ротора 7, 8 и полупроводниковый коммутатор 9. На внутренней поверхности статора 1 расположены тороидальные катушки обмотки возбуждения 10, 11.
Торцевые щиты 12, 13 статора 1 представляют собой немагнитные диски 14, 15, установленные неподвижно относительно вала 16 посредством подшипников 17, 18. С валом 16 жестко сочленены два (для данного варианта двигателя) модуля дискового ротора 7, 8, каждый из которых состоит из немагнитных дисков 19, 20 и ферромагнитных полюсов 21, 22. Ферромагнитные полюсы 21, 22 отделены от модулей якоря 2, 3, 4, 5 рабочим воздушным зазором δ. Число полюсов каждого из модулей дискового ротора 7, 8 равно числу пар полюсных делений якоря τ, а длина каждого из полюсов вдоль образующих якоря равняется αδ·τ, где αδ - коэффициент полюсного перекрытия.
Модули якоря 2, 3, 4, 5 конструктивно однотипны и содержат ферромагнитные стержни-зубцы 23, 24, 25, 26, образующие зубцовые зоны, в промежутках которых уложены проводники секций обмотки якоря 27, 28, 29, 30 (фиг.5).
В предлагаемом двигателе статор 1 состоит из ряда отдельных магнитно не связанных ферромагнитных стержней 31 П-образной формы, концевые части которых закреплены в немагнитных торцевых щитах 12, 13, образуя замкнутую магнитную цепь двигателя совместно со стержнями-зубцами 23, 24, 25, 26 модулей якоря 2, 3, 4, 5 и ферромагнитными полюсами 21, 22 модулей дискового ротора 7, 8. Промежуточные модули якоря 3, 4 зафиксированы на общем неподвижном немагнитном диске 32 посредством дополнительного подшипника 33. При необходимости количество промежуточных модулей якоря может быть увеличено соответственно заданным параметрам электрического двигателя. При этом, исходя из того, что рабочий воздушный зазор δ выбирается только из условий технологических возможностей, величина суммарного воздушного зазора δo на пути основного магнитного потока двигателя Фo не оказывает существенного влияния на массогабаритные показателя обмотки возбуждения. Так, например, предварительный расчет предлагаемого двигателя мощностью Рн=40 кВт при полюсном делении по среднему диаметру модуля якоря τср=0,227 м, величина расчетного воздушного зазора δo=0,004 м, что соответствует четырем технологическим зазорам δ=0,001 м, что и принято для выбранной для анализа конструкции, содержащей четыре модуля якоря (Пм=4), каждый из которых обеспечивает номинальную мощность 10 кВт. При этом суммарная величина воздушных промежутков на пути замыкания магнитного потока, созданного МДС проводников обмотки якоря одного полюсного деления (фиг.5), составляет δс=0,2 м, где δс=12 вп+8·δ=12·0,016+8·0,001=0,2 м ((вп - ширина воздушного промежутка между зубцами модуля якоря Zτ=6 - число зубцов на полюсное деление). Расчетное номинальное значение магнитной индукции поперечного поля реакции якоря ВЯ.Р.Н.=0,11 Тл, что обеспечивает перегрузочную способность двигателя, исходя из условия отсутствия опрокидывания магнитного поля на участке якоря, соответствующего полюсному делению:
где Bδ.н.=0,75 Тл - номинальное значение магнитной индукции в рабочем воздушном зазоре. Следует отметить, что при неизменной мощности Рн=40 кВт и числе модулей якоря Пм=2, λ=13, а при Пм=6, λ=4.
В предлагаемом БДПТ ДР возможны два способа укладки секций обмотки якоря: использование двухслойной обмотки для каждого из модулей якоря 2, 3, 4, 5; использование однослойной обмотки. В этом случае проводники секций обмотки якоря, например, 28 модуля 3 укладываются со сдвигом в полюсное деление τ относительно проводников секций обмотки 27 модуля 2. Соответственно, сдвиг обеспечивается и в модуле 5 относительно модуля 4 (фиг.5), чем обеспечивается полная компенсация МДС токов лобовых частей всей обмотки якоря двигателя, т.е. отсутствие пульсирующего магнитного потока токов лобовых частей по пути основного магнитного потока Фo.
Питание замкнутой обмотки якоря, образованной секциями 27, 28, 29, 30 модулей якоря 2, 3, 4, 5, осуществляется полупроводниковым коммутатором 9, структурная схема которого (фиг.1) состоит из датчика положения ротора 34 (ДПР), блока управления 35 (БУ), блока силовых ключей 36 (БСК) и выводов секций обмотки якоря 37 (ОЯ). Датчик положения ротора 34 (ДПР) выполнен на базе магнитодиодов 38, установленных на зубцах одного полюсного деления одного из модулей якоря, например 5. Работа полупроводникового коммутатора 9 состоит в следующем: при установленном сигнале реверса Хp под воздействием сигналов ДПР 34 блок управления БУ 35 подает сигналы на силовые ключи БСК 36, соответвующие ДПР 34, которые открываются, и ток двигателя протекает от положительного полюса источника питания через открытый один ключ, две параллельные ветви замкнутой обмотки якоря 37, другой открытый ключ к отрицательному полюсу источника питания. Такой коммутатор обеспечивает работу двигателя во всех режимах - двигательном, динамического торможения, противовключения.
Предлагаемый БДПТДР работает следующим образом. При подаче напряжения на тероидальные катушки обмотки возбуждения 10, 11 (фиг.2, 5) взаимодействием основного магнитного потока Фo и токов проводников секций обмотки якоря 27, 28, 29, 30 модулей якоря 2, 3, 4, 5, находящихся в данный момент в зоне полюсов 21, 22 модуля дискового ротора 7, 8, создается электромагнитный момент МЭМ., под действием которого ротор 6 начинает вращение. Полупроводниковый коммутатор 9 по сигналам датчиков положения ротора 34 коммутирует токи в секциях обмотки якоря 37 посредством жгута 39 таким образом, чтобы при вращении в одну сторону токи проводников, находящихся в это время против ферромагнитных полюсов 21, 22, сохраняли неизменное направление. Регулирование частоты вращения и реверс двигателя осуществляется известными для классических машин способами.
| название | год | авторы | номер документа |
|---|---|---|---|
| НИЗКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С КОЛЬЦЕВЫМ СТАТОРОМ | 2009 |
|
RU2417506C2 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ИНДУКТОРНОГО ТИПА | 2003 |
|
RU2286642C2 |
| ТОРЦОВЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ИНДУКТОРНОГО ТИПА | 2003 |
|
RU2286643C2 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2185018C2 |
| Линейный двигатель постоянного тока | 1987 |
|
SU1580498A1 |
| Магнитоэлектрический линейный двигатель | 1987 |
|
SU1582295A1 |
| МОДУЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2012 |
|
RU2510121C2 |
| Линейный электродвигатель постоянного тока | 1987 |
|
SU1504748A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| Линейный двигатель постоянного тока | 1979 |
|
SU1037387A1 |
Изобретение относится к области электромашиностроения и может быть использовано в электроприводах общепромышленных механизмов, в частности, как базовая часть бесконтактных двигателей постоянного тока транспортных установок. Сущность изобретения состоит в том, что в бесконтактном двигателе постоянного тока с дисковым ротором, содержащем статор, выполненный из ряда отдельных магнитно не связанных ферромагнитных стержней П-образной формы, тороидальную обмотку возбуждения и дисковый ротор, согласно изобретению статор выполнен из ряда стержней П-образной формы, которые расположены симметрично относительно ферромагнитных полюсов дискового ротора, основание которого выполнено из немагнитного материала и жестко соединено с валом, концевые части радиально ориентированных стержней П-образной формы закреплены в немагнитных торцевых щитах статора, а секции обмотки якоря уложены в сквозные пазы между ферромагнитными стержнями-зубцами каждого из модулей якоря. При этом коммутация токов секций по сигналам датчика положения осуществляется полупроводниковым коммутатором. Технический результат, достигаемый настоящим изобретением, состоит в обеспечении повышения перегрузочной способности двигателя и быстродействия в переходных режимах, а также в уменьшении массы дискового ротора и, как следствие, двигателя в целом. 5 ил.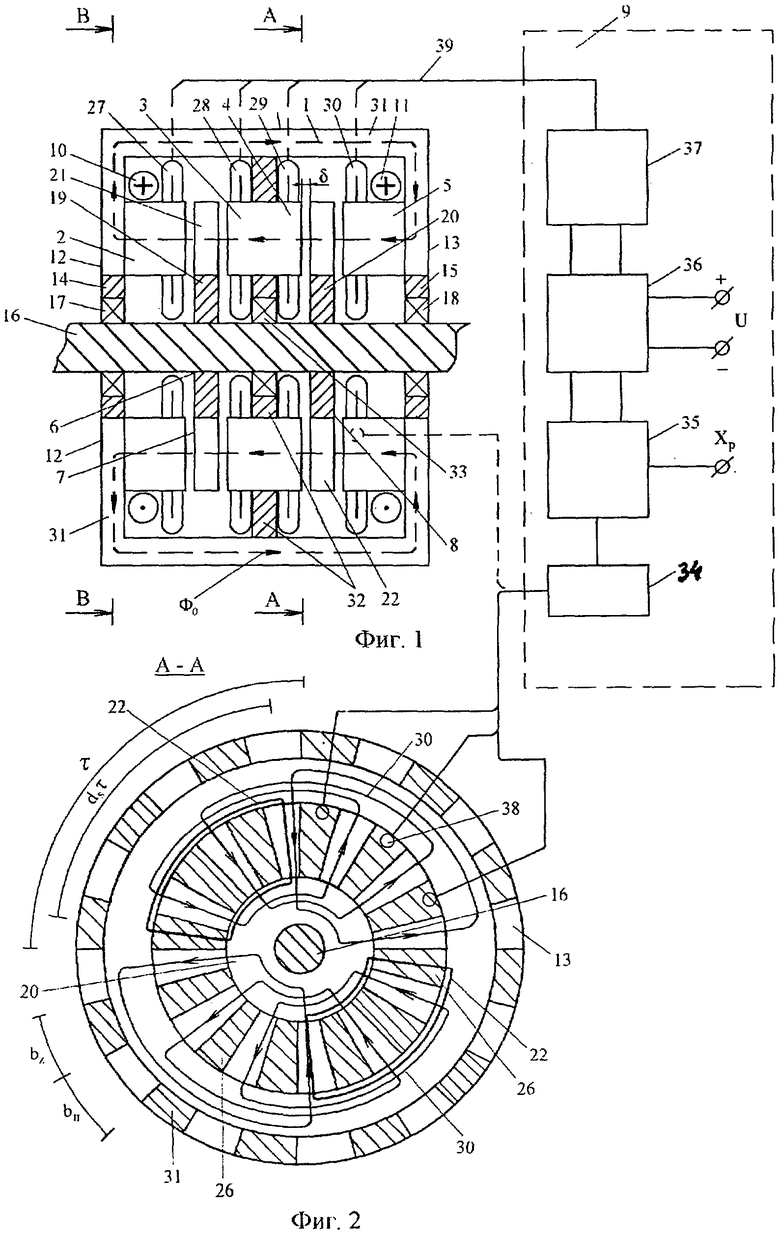
Бесконтактный двигатель постоянного тока с дисковым ротором, содержащий статор с радиальными пазами для укладки обмотки якоря, тороидальную обмотку возбуждения и дисковый ротор, отличающийся тем, что статор выполнен из ряда отдельных магнитно не связанных ферромагнитных стержней П-образной формы, расположенных симметрично относительно ферромагнитных полюсов дискового ротора, основание которого выполнено из немагнитного материала и жестко соединено с валом, а концевые части радиально ориентированных стержней П-образной формы закреплены в немагнитных торцевых щитах статора, причем секции обмотки якоря уложены в сквозные пазы между ферромагнитными стержнями-зубцами каждого из модулей якоря, при этом коммутация токов секций по сигналам датчика положения осуществляется полупроводниковым коммутатором.
| БУТ Д.А | |||
| Бесконтактные электрические машины | |||
| - М.: Высшая школа, 1990, с.153 | |||
| Электромеханический преобразователь вентильного электродвигателя | 1987 |
|
SU1626308A1 |
| Бесконтактная электрическая машина торцового типа | 1988 |
|
SU1539914A1 |
| Бесщеточная электрическая машина постоянного тока дискового типа | 1982 |
|
SU1494877A3 |
| Электромеханический преобразователь моментного вентильного электродвигателя | 1989 |
|
SU1702493A1 |
| ВАКЦИНА ДЛЯ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ БРУЦЕЛЛЕЗА | 1994 |
|
RU2076493C1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

