(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ В ЗОНАХ ЧЕРВЯЧНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для многоканального терморегулирования | 1977 |
|
SU669337A2 |
| Многопозиционный регулятор | 1978 |
|
SU796947A1 |
| Устройство для регулирования температуры | 1977 |
|
SU739494A1 |
| Схема стабилизации технологических параметров экструдата | 1976 |
|
SU659399A2 |
| Способ регулирования процесса экструзии | 1978 |
|
SU836021A1 |
| Позиционный регулятор | 1981 |
|
SU981959A1 |
| Устройство для регулирования давления расплава в экструдере | 1986 |
|
SU1388309A1 |
| Устройство для регулирования температуры | 1987 |
|
SU1427347A1 |
| Импульсный регулятор | 1976 |
|
SU640251A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ РАСПЛАВА И ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ЭКСТРУДЕРА ОТ ПЕРЕГРЕВАНИЯ | 2003 |
|
RU2239557C1 |
Изобретение относится к экструзионному оборудованию для переработки пластмасс, в частности к автоматическим системам регулирования температуры червячных машин. Известны системы терморегулирования червячных машин, состоящие из регулируемых объектов в виде тепловых зон мате{хиального цилиндра, в котором с помощью электродвигателя вращается червяк, и установленных на каждой зоне нагревательно-охлажд;ающих устройств, датчиков температуры и позиционных регуляторов, осуществляющих регулирование пО схеме «включено-выключено 1. Недостаткам этой системы является то, что ввиду больщой тепловой емкости и инерционности цилиндра, при позиционном регулировании имеют место значительные колебания его температуры, т. е. не обеспечивается высокая точность терморегулирования. Точность повышается при применении П-, И-, ПИ-и ПИД - законов регулирования, осуществляемых с помощью регуляторов непрерывного действия. Как частичный случай, регуляторами непрерывного действия может быть реализовано пропорциональное регулирование. Для этих регуляторов характерно плавное изменение мощности нагревателей в зависимости от отклонения регулируемой температуры тепловой зоны от заданного значения или в зависимости от интеграла и производной этого от-, клонения в соответствии с применяемым законом регулирования. Однако такое регулирование требует применения сложных и дорогостоящих непрерывных регуляторов. К тому же, при работе червячной мащины в режиме охлаждения реализовать эти законы регулирования с помощью непрерывных регуляторов невозможно, что требует дополнительной установки позиционного регулятора, управляющего работой системы охлаждения. Ввиду этих недостатков регуляторы непрерывного действия в последнее время на отечественном и зарубежном экструзионном оборудовании не применяются. Известны также регуляторы, представляющие собой позиционные регуляторы, охваченные отрицательной обратной связью 2. Структура обратной связи определяет закон регулирования, а изменение выходного параметра по аналогии с позиционным регулятором носит импульсный характер.
Однако, в отличие от позиционных, эти регуляторы могут обеспечить существенно более высокую частоту переключений (импульсов), определяемую параметрами обратной связи, а, следовательно, значительно меньшую амплитуду колебаний регулируемого параметра.
Наиболее близкими к предлагаемым являются импульсные регуляторы температуры, предназначенные для терморегулирования электропечей и машин по переработке пластмасс. Обратная связь в них выполнена в виде зарядно-разрядного RC-контура, состояш,его из соединения параллельной и последовательной RC-цепочек 3.
Недостаток системы терморегулирования червячной машины заключается в том, что с увеличением скорости врашения червяка (например, при переводе червячной машины на новый режим эксплуатации) увеличивается амплитуда колебаний температуры зон цилиндра, т. е. снижается точность терморегулирования зон, а с уменьшением скорости врашения червяка система снижает показатели надежности.
Это вызвано тем, что динамические свойства тепловых зон цилиндра существенно зависят от скорости вращения червяка, в то время как параметры обратной связи регулятора, которые определяют частоту следования импульсов в системе, от скорости не зависят. Поэтому, при практически неизменной частоте следования импульсов, увеличение скорости вращения червяка приводит к возрастанию амплитуды колебаний температуры зон из-за повышения скорости протекания переходных процессов, вызванных периодическими включениями и отключениями систем теплоснабжения. С уменьшением скорости вращения червяка частота импульсов оказывается больше той, при которой уже могла бы быть обеспечена заданная амплитуда. Завышенная частота переключений снижает надежность системы.
Зависимость динамических свойств зон цилиндра от скорости вращения червяка объясняется резким возрастанием коэффициента теплоотдачи от стенки цилиндра к перерабатываемому полимерному материалу при увеличении скорости вращения червяка. Очевидно, чем больше коэффициенты теплоотдачи, чем быстрее протекают переходные тепловые процессы в зонах, тем меньше инерционность регулируемых объектов.
Цель изобретения - повышение точности и надежности режима работы устройства при различных скоростях вращения червяка в диапазоне от нуля до максимума.
Поставленная цель достигается тем, что в устройство для регулирования температуры в зонах червячной машины, содержащее установленные в каждой зоне нагревательно-охлаждаюшие элементы и датчики температуры, подключенные соответственно к выходам и входам позиционных регуляторов с обратными связями, выполненными в виде зарядно-разрядных RC-контуров, введен контактный датчик оборотов, связанный с приводом червяка, и задающие резисторы, причем контакты датчика оборотов включены параллельно задающим резисторам, установленным в цепях заряда-разряда RC-контуров.
Вследствие этого по мере увеличения скорости вращения червяка последовательно замыкаются контакты датчика оборотов, причем каждый из них - при достижении, определенной скорости вращения, в соответствии с настройкой. Через эти контакты запитываются обмотки промежуточных реле, контакты которых, замыкаясь, шунтируют добавочные сопротивления на входах обратных связей регуляторов зон. Это изменяет частоту следования импульсов в системе в соответствии с изменением динамических свойств объектов регулирования, что позволяет поддерживать требуемую точность и максимально возможную при этом надежность системы во всем диапазоне ско5 ростей вращения червяка.
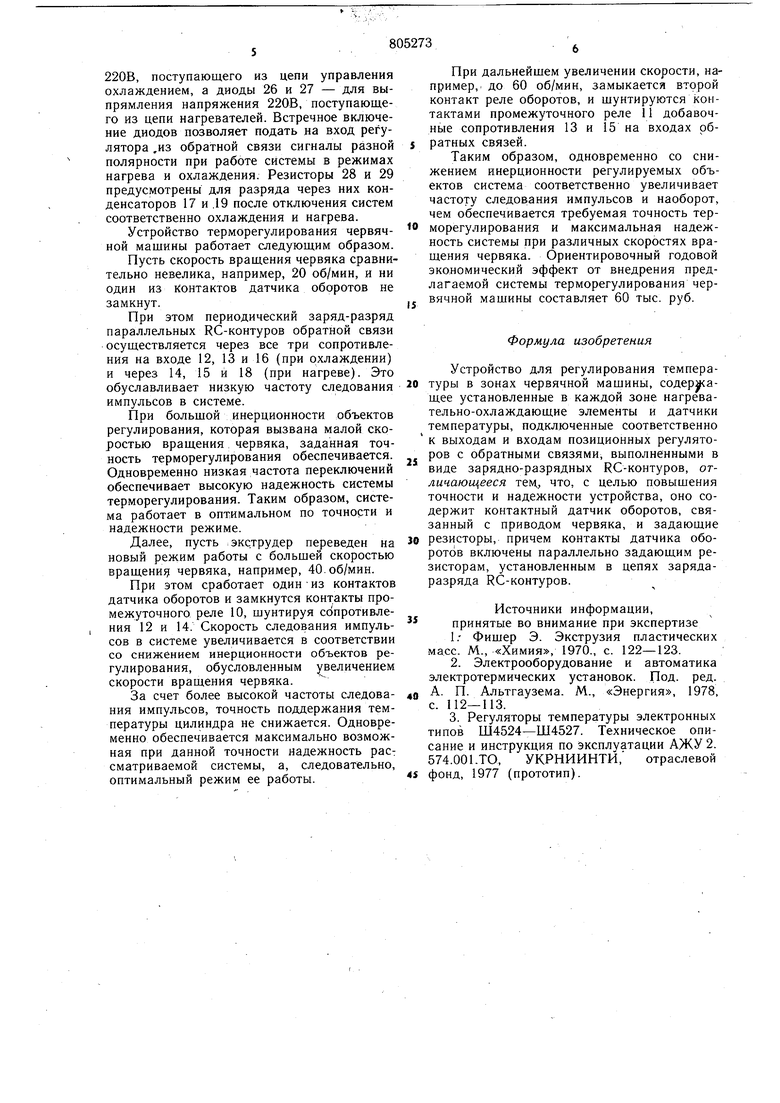
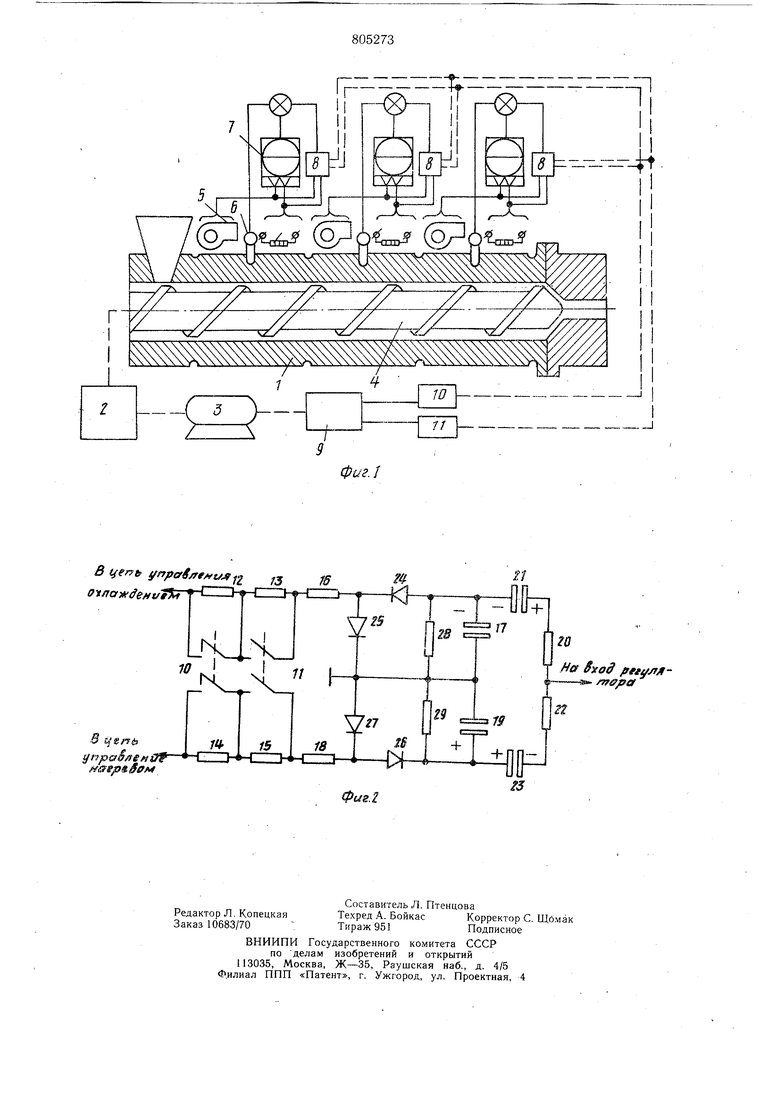
На фиг. 1 представлена функциональная схема предлагаемой системы терморегулирования, а на фиг. 2 - принципиальная схема обратной связи.
В материальном цилиндре 1 с помощью
0 электродвигателя 2 и редуктора 3 вращается червяк 4. Цилиндр секционирован на три тепловые зоны, каждая из которых содержит нагревательно-охлаждающие элементы 5, датчик 6 температуры (термопару) и позиционный регулятор 7 (например, ре гулирующий миливольтметр МР64-ОЗЙП), охваченный обратной связью 8. На электродвигателе установлен контактный датчик 9 оборотов, первый контакт которого замыкает ся, например, при скорости вращения ротора 500 об/мин, а второй - при 1000 об/мин. При коэффициенте редукции к-20 это соответствует скоростям вращения червяка соответственно 25 и 50 об/мин.
Контакты датчика оборотов включены в цепи питания катушек промежуточных
5 реле 10 и И (фиг. 2). Контакты реле 10 и 11, замыкаясь, шу.нтируют задающие резисторы 12-15, устанавливаемые на входах обратных связей регуляторов зон.
Обратная связь состоит из двух симметричных половинок (фиг. 2). Одна из них используется при работе системы в режиме нагрева, вторая - в режиме .охлаждения. Каждая половинка состоит из соединения параллельных зарядно-разрядных RC-контуров 12, 13, 16 и 17 (при управле5 НИИ охлаждением), 14, 15, 18 и 19 (при управлении нагревом) и последовательных RC-контуров 20, 21 (охлаждение), 22, 23 (нагрев). Диоды 24 и 25 служат для однополупериодного выпрямления напряжения
220В, поступающего из цепи управления охлаждением, а диоды 26 и 27 - для выпрямления напряжения 220В, поступающего из цепи нагревателей. Встречное включение диодов позволяет подать на вход регулятора ,из обратной связи сигналы разной полярности при работе системы в режимах нагрева и охлаждения. Резисторы 28 и 29 предусмотрены для разряда через них конденсаторов 17 и .19 после отключения систем соответственно охлаждения и нагрева.
Устройство терморегулирования червячной машины работает следующим образом.
Пусть скорость вращения червяка сравнительно невелика, например, 20 об/мин, и ни один из Контактов датчика оборотов не замкнут.
При этом периодический заряд-разряд параллельных RC-контуров обратной связи осуществляется через все три сопротивления на входе 12, 13 и 16 (при охлаждении) и через 14, 15 и 18 (при нагреве). Это обуславливает низкую частоту следования импульсов в системе.
При больщой инерционности объектов регулирования, которая вызвана малой скоростью вращения червяка, заданная точность терморегулирования обеспечивается. Одновременно низкая частота переключений обеспечивает высокую надежность системы терморегулирования. Таким образом, система работает в оптимальном по точности и надежности режиме.
Далее, пусть :экструдер переведен на новый режим работы с больщей скоростью вращение червяка, например, 40. об/мин.
При этом сработает один из контактов датчика оборотов и замкнутся контакты промежуточного реле 10, шунтируя сбпротивления 12 и 14. Скорость следования импульсов в системе увеличивается в соответствии со снижением инерционности объектов регулирования, обусловленным увеличением скорости вращения червяка.
За счет более высокой частоты следования импульсов, точность поддержания температуры цилиндра не снижается. Одновременно обеспечивается максимально возможная при данной точности надежность раст сматриваемой системы, а, следовательно, оптимальный режим ее работы.
При дальнейщем увеличении скорости, например, до 60 об/мин, замыкается второй контакт реле оборотов, и щунтируются контактами промежуточного реле 11 добавочные сопротивления 13 и 15 на входах рб5 ратных связей.
Таким образом, одновременно со снижением инерционности регулируемых объектов система соответственно увеличивает частоту следования импульсов и наоборот, чем обеспечивается требуемая точность терморегулирования и максимальная надежность системы при различных скоростях вращения червяка. Ориентировочный годовой экономический эффект от внедрения предлагаемой системы терморегулирования червячной мащины составляет 60 тыс. руб.
Формула изобретения
Устройство для регулирования температуры в зонах червячной мащины, содержащее установленные в каждой зоне нагревательно-охлаждающие элементы и датчики температуры, подключенные соответственно к выходам и входам позиционных регуляторов с обратными связями, выполненными в
S виде зарядно-разрядных RC-контуров, отличающееся Tetj(, что, с целью повыщения точности и надежности устройства, оно содержит контактный датчик оборотов, связанный с приводом червяка, и задающие O резисторы, причем контакты датчика оборотов включены параллельно задающим резисторам, установленным в цепях зарядаразряда RC-контуров.
Источники информации, принятые во внимание при экспертизе
0 А. П. Альтгаузема. М., «Энергия, 1978, с. 112-113.
S фонд, 1977 (прототип). if Н8)--1
В tferfb ynpcfSfff t/. j otfiay)fdeMt/f
П
15
18
3;
-i20
Hcf $ход fffgajr/i- frr&/fa
I
fS+
