(54) УСТРОЙСТВО ДЛ.; МОДЕЛИРОВАНИЯ СТАТИЧЕСКОГО МАГНИТНОГО ПОЛЯ
Известно устройство для моделирования нелинейных процессов, содержащее сеточную модель, две cxetta сравнения, генератор напряжения специальной формы
Однако оно решает-; ограниченный класс задач и не применимо при моделировании статического магннТного поля.
Наиболее близким к изобретению является устройстЗвЬ для моделирования линейных и нелинейных объектов с распределенными параметрами, содержащее сеточную модель, каждая дискретная ячейка которой содержит первую и вторую пару управляемых проводймостей,.генератор напряжения специальной формы, первое сравнивающее устройство Г2 .
Недостатк-ами устройства являются низкая точность и невозможность его использования при моделировании статического магнитного поля.
Цель изобретения - повьниение точности, а также расширение класса решаемых задач.
Поставленная цель достигается тем, что « устройство для моделирования статического магнитного поля, содержащее сеточную модель, к каждому узлу которой подключены управляемые резисторы и конденсатор, генератор напряжения и первый блок сравнения, введены второй блок сравнения, два вычитающих блока, элемент1з1 ИЛИ, два блока перемножения, блок коррекции сигнала и блок формирования временных интервалов, выход которого подклзр чен к первым входам первого и второго элементов ИЛИ, выходы которых соединены с управляющими входами соответствукнцих управляемых резисторов сеточной модели, выводы соответствующих управляемых резисторов сеточной модели подключены ко входам первого и второго вычитающих блоков, выходы которых соединены со входами блока коррекции сигнала И с первыми входами первого и второго блоков сравнения, выходы которых подключены к вторым входам первого и второго элементов ИЛИ соответственно, выход генератора напряжения подключен к первым входам первого и второго блоков перемножения, выходы которых соединены с вторыми входами первого и второго блоков С1 шнения соответственно, выходы блока коррекции сигнала : подключены к вто1ШМ входам первого и второго блоков перемножения соответтвенно, а также тем, что блок коррекции сигнала содержит, генератор пилообразного напряжения блок задания нелинейности, первый и второй ифференциальные усилители, первый второй блоки сравнения, первый и второй широтно-импульсные людулятоы, масштабньай резистор, шесть упавляемых резисторов, первые выводьа
первого, второго, третьего и четвертого управляемых резисторов подключены к шине нулевого потенциала, управлякадие входы первого и второго управляемых резисторов соединены с выходом первого блока сравнения, выход второго блока сравнения под|ключен к управляющим входам третьего и четвертого управляемых резисторюв вторые выводы второго и третьего уп равляемых резисторов соединены с первыми входами дифференциальных усилителей и с одним выводом масштабного резистора, другой вывод которого подключен к шине источника постоянного напряжения и к первым выводам пятого и шестого упраьляемых резисторов, вторые выводы которых соответственно соединены с вторыми входами первого и второго дифференциальных усилителей и вторыми выводами первого и четвертого управляемых резисторов, выходы первого и второго дифференцисшьных усилителей являются соответственно первым и вторым входами блока коррекции сигнала и подключены соответственно к первым входам первого и второго широтно-импульсных модуляторов, выходы которых соединены с управл5пощими входами пятого и шестого управляемых резисторов соответственно, выход генератора пилообразного напряжения через блок задания нелинейности подключен ко вторым входам широтно-импульсных модуляторов и к первым входам блоков сравнения, вторые входы которых являются первым. и вторым входами блока коррекции сигнала соответственно.
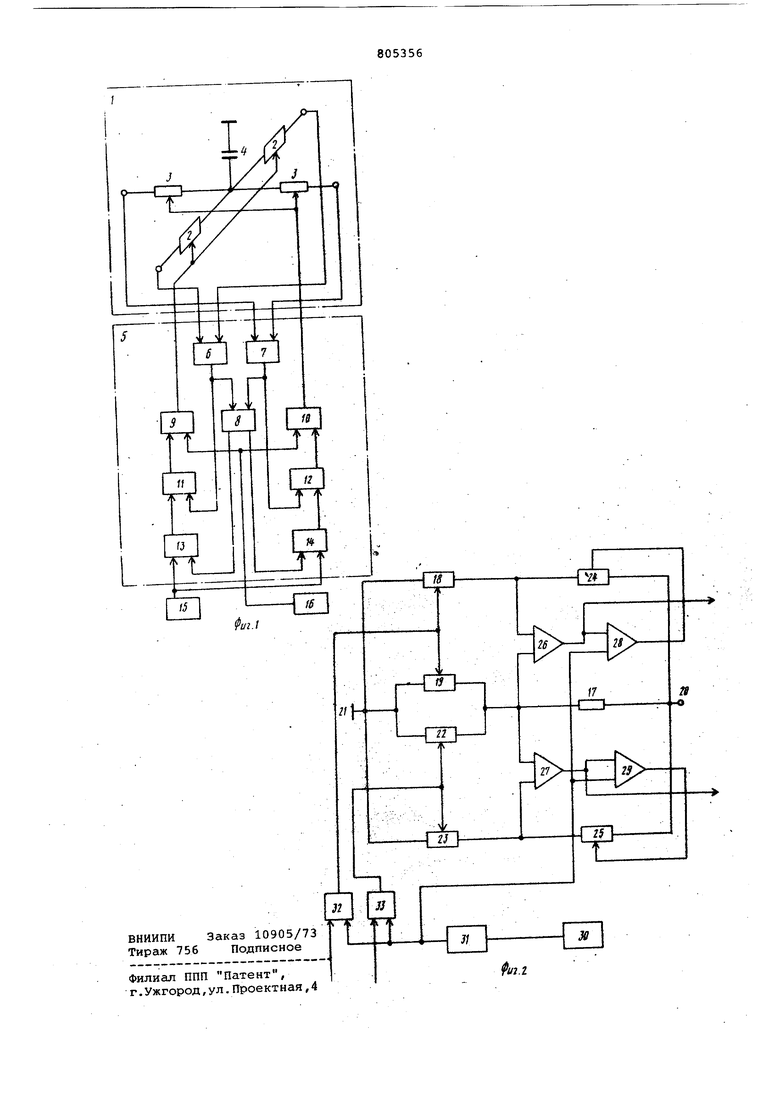
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - схема . блока коррекции сигнала.
Устройство для моделирования статического магнитного поля содержит сеточную модель 1, к каждому узлу которой подключены первая и вторая пара управляемых резисторов 2 и 3 и конденсатор 4. Схема 5 управления параметЕ)ами сеточной модели 1 состоит из первого 6 и второго 7 вычитающих блоков , блока 8 коррекции сигнала, двух элементов ИЛИ 9 и 10, первого 11 и второго 12 блоков сравнения (компараторы), двух блоков. 13 и 14 перемножения. Кроме того. Она содержит генератор 15 напряжения и блок 16 формирования временных интервалов .
Блок 8 коррекции сигнала содержит масштабный резистор 17, первый 18 и второй 19 управляемые резисторы (время-импульсного типа), шину 20 источника постоянного напряжения, шину 21 нулевого потенциала, третий 22 и четвертый 23 управляемые резисторы, пятый 24 и шестой 25 управляемые резисторы, дифференциальные усилители 26 и 27, широтно- импульсные модуляторы 28 и 29, генератор 30 пилообразного напряжения, блок 31 зада ния нелинейности, перрый и второй блоки 32 и 33 сравнения. Устройство работает следуихцим образом. Среднее значение проводимостей резисторов 2 и 3, в качестве котора х используются шнротно-импульсные управляемые проводимости, представляющие собой цепочку из последовательно соединенных постоянной проводимости и ключевого элемента, определяется относительной длительностью импупьсов прямоугольного напряжения, подаваемых на ключевой элемент. Для формирования этого напряжения в устройстве использована специальная схема 5 управления параметрами сеточной мо дели 1, представляющая собой в лчислительное устройство, вырабатывакидее напряжение,относительная длительност импульсов которого.соответственно определяется величинами выходных напряжений дискретной ячейки сбточно модели и формой периодического напря жения генератора 15 напряжения. Форма этого напряжения, определяемая характером нелинейных свойств модели руемой среды и в рассматриваемом слу чае ферромагнитной среды, равна V)M , T6-t:C(n4.l)T. Напряжение с отдельной дискретной ячейки сеточной модели 1 ввиде непрерывных сигналов поступает на вычи тающие блоки 6 и 7, где формируются напряжения ди U-t-U/JL и U, - 0 которые подаются на блок 8 коррекции сигнала (фиг. 2), где они поступают на блоки 32 и 33 сравнения, куда так же с блока 31 подается развертыашц цее напряжение вида ((t) На выходе блоков 32 н 33 формируются прямоугольные импульсы, относительна длительность которых соответственно пропорциональна квадратам входных величин. Эти импульсы подаются на уп равляемые резисторы 18, 19, 22 и 23 спаренного моста так, что среднее значение их проводимости оказывается пропорционально относительной длительности прямоугольных импульсов Поскольку управляемые peSHCTojMii 19 и 22 включены параллельно, то их общая эквивалентная проводимость пропорциональна сумме относительных длительностей или сумме квадратов входных величин. Управляемые резисторы и резистор 17 включены так, что в це лом мост выполняет Математическиеоперации сложения и деления квадратов входных напряжений ли и дИ, При изменении одного иэ напряжений ди,1 или uUv, изменяется относительная длительность прямоугольных импульсов что влечет за собой изменение проводимости плеч спаренного Моста и нарушает его балансное состояние. При этом в диагоналях мостовой схемы появляются напряжения разбаланса, которые усиливаются дифференциальными усилителями 26 и 27 и поступают на широтно-импульсные модулятора 28 и 29, куда также с выхода блока 31 задания нелинейности поступает развертывающее напряжен э, пропорциональное корню квадрааному нэ напряжения генеоатора 30 пилообразного напряжения, равного U Y выходе модуляторов 28 и 29 образуются прямоугольные импульсы, котор«ые поступают на управляемые резисторы 24 и 25, проводимость которых изменится так, что приводят спаренный мост в состояние равновесия. Спаренный мост в этом случае представляет собой замкнутую систему регулирования. Питание моста осуществляется источником постоянного напряжения от шин 20 и 21. В уравновешенном состоянии выходное напряжение дифференциальны уснлителей 26 и 27 оказывается соответственно равным „-.Г ,,„ ..J дЦу r«cos iL. VW AU-i + AU| и в виде постоянного напряжения поступает на блоки 13 н 14 перемноже-j НИИ, в качестве которых используются стандартные блоки перемножения (фиг. 1), куда также с генератора 15 напряжения поступает развертывающее напряжение UctjCt), .где формируются сигналы соответственно равные произведению U45(t)sinoL н иф(1)со5оС . Сформированные сигналы поступают соответственно на первый 11 и второй 12 блоки сравнения (компараторы), куда также подаются напряжения ди и дОу с вычитающих блоков 6 н 7. Момент вк иочения компараторов 11 и 12, которые выполняют функции широтно-нмпульсных модуляторов, соответственно определяется из условий (t)sino(-riUx (ц ) иЦ4,(ц )со5 1-«диу(ц ), из KOTOE DC следует, что Тл дОх г Т дЦу BKTsinjL s Т BvTcosei Полученные сигналы поступеиот на первые входы элементов ИЛИ 9 и 10, куда также с блока 16 формирования временных интервалов подгизтса njMO«oугольные импульсы относительной длительности тГм характеризуюиив Начальное значение узловой проводимости. Элементы ИЛИ 9 н 10 осуществляют суммирование временных интервалов. Если необходимо осуществить «ычитание длительностей временных интервалов, то в качестве элементов ИЛИ 9 и 10 могут быть использованы элетленты И-НЕ. На выходе указанных элементов образуются прямоугольные импульсы, относительная длительность которых соответственно равна ли1 fx VTx-VO v osJПолученные управляющие прямоугольные импульсы подаются на соответствующие управляющие входы управляемых резисторов 2 и 3 сеточной модели 1, величины которых соответственно равны
А Ov
9х Гх9о Гн9о+ VrTib H- sineL
B TcosX 9н- -Ьн Е ЙГУсреднякнций конденсатор 4 служит для подавления высших Гармоник тока и напряжения.
Получение управлянадих сигналов время-{««пульсного типа позволяет производить непрерывное изменение в процессе решения задачи величин узловой проводимости дискретных ячеек сеточной модели, в функции ее напряжений и нелинейных свойств моделируемой среды, позволяет автсм атизировать процесс набора параметров модели и автоматически изменять их в процессе решения по заданной зависимости, что расширяет класс решаемых задач, а также повьашает точность.
Формула изобретения
1. Устройство для моделирования статического магнитного поля, содержащее сеточную модель, к каждому узлу которой подключены управляемые р-езисторы и конденсатор, генератор напряжения и первый блок сравнения, отличающееся тем, что, с целью повышения точности, в устройство введены второй блок сравнения, два вычитаккцих блока, элементы ИЛИ, два блока перемножейия, блок коррекции сигнала и блок формирования временных интервалов, выход которого подключен к первым входам первого и второго элементовИЛИ, выхода которых соединены с управляющими входами соответствуивдих управляег йлх резисторов сеточной модели, выводы соответствукадих управляемых резисторов сеточной модели подключены ко входам первого и второго вычитакяцих блоков, выходы которых соединены со входами блока коррекции сигнала и с первыми входами первого и второго Слоков сравнения, вьгходы которых подключены к BTOJXJM входам пергого и второго элементов ИЛИ соответственно, выход генератора напряжения подKJB04eH к первЕлм входам первого и второго блоков перемножения, выходы ко торых соединены с входами г первого и второго блоков сравнения
соответственно, выходы блока коррекции сигнала подключены к вторым входам первого и второго блоков перемножения соответственно.
5 2. Устройство ПОП.1, отличающееся тем, что блок коррекции сигнала содержит генератор пилообразного напряжения, блок задания нелинейности, первый и второй дифференциQ альные усилители, первый и второй блоки сравнения, первый и второй широтно-импульсные модуляторы,масштабный резистор и шесть управляемых резисторов, первые выводы первого, втоf рого, третьего и четвертого управляемых резисторов, подключены к шине нулевого потенциала, управляющие входы первого и второго управляемых резисторов соединены с выходом первого блока сравнения, выход второго блока сравнения подключен к
управляккцим входам третьего и четвертого управляемых резисторов, вторые выводы второго и третьего управляемых резисторов соединены с первыми
5 входами дифференциальных усилителей и с одним выводом масштабного резистора, другой вывод которого подключен к ишне источника постоянного напряжения и к первым выводам пятого
« и шестого управляемых резисторов, вторые выводы которых соответственно соединены с вторыми входами первого и второго дифференциальных усилителей и вторыми выводами первого и четвертого управляемых резисторов, выходы первого и второго дифференциальных, усилителей являются соответственно первым и вторым входами блока коррекции сигнала и подктпочены соответственно к первым входам первого и второго широтно-импульсных модуляторов, выходы которых соединены с управляющими входами пятого и шестого управляемых резисторов соответственно, выход генератора
« пилообразного напряжения через блок задания нелинейности подключен ко вторым входам широтно-импульсных модуляторов и к первым входам блоков сравнения, вторые входы которых явя ляются первьп и вторым входами блока коррекции сигнала соответственно.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 479126, кл. G 06 G 7/46, 1973.
5 2. Авторское свидетельство СССР 466518, кл. G 06 G 7/48, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения нелинейныхзАдАч СТАТичЕСКОгО МАгНиТНОгОпОля | 1979 |
|
SU842857A1 |
| Устройство для моделирования теплофизических свойств нетермостабильных материалов | 1977 |
|
SU705473A1 |
| Резистивный узел сеточной модели | 1983 |
|
SU1120366A1 |
| Устройство для моделирования объектов с распределительными параметрами | 1973 |
|
SU466518A1 |
| Устройство для моделирования объектов с распределенными параметрами | 1981 |
|
SU1043660A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
| Функциональный преобразователь | 1977 |
|
SU696490A1 |
| Узловой элемент сеточной модели | 1979 |
|
SU781842A1 |
| Устройство для моделирования нелинейных процессов | 1973 |
|
SU479126A1 |
| Устройство для моделирования распределенных объектов управления | 1974 |
|
SU491960A1 |