Изобретение относится к области вычислительной радиационной томографии, и может применяться для неразрушающего контроля объектов и исследования их внутреннего строения.
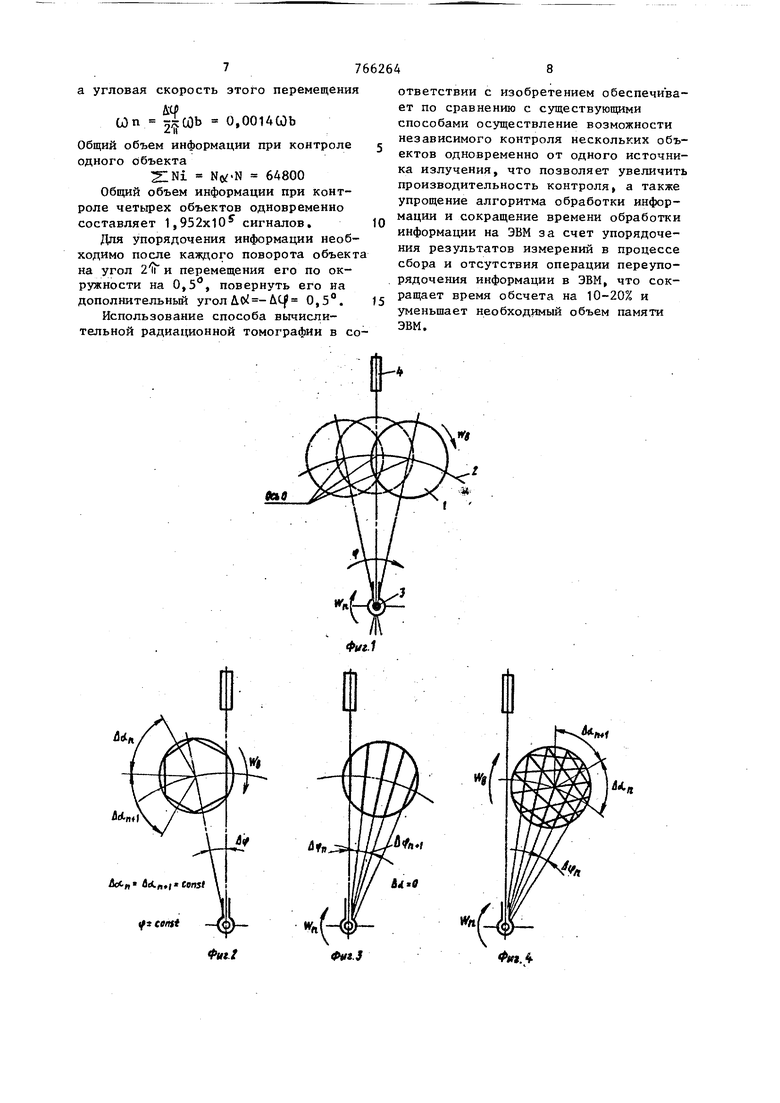
Известен способ вычислительной радиационной томографии, заключающийся в том, что производят .линейное сканирование исследуемого объекта путем перемещения сборки источник рентгеновского пучка - детектор , после каждого цикла сканирования про водят поворот сборки на определенный угол и повторяют сканирование для то го, чтобы получить требуемое количество совокупностей траекторий, по которым производят измерение поглоще ния излучения в исследуемом объекте и по набору полученных данных о поглощении излучения с помощью ЭВМ стро ят томографическое изображение. Этот способ характеризуется сложностью реализации, так как в нем необходимо осуществлять два типа движе ния - линейное перемещение сборки источник - детектор и ее поворот на дискретные углы. Известен способ вычислительной ра диационной томографии, заключающийся в том, что формируют веерный пучок рентгеновского излучения, угловой раствор веера которого достаточен для охвата всего исследуемого объекта, регистрацию прошедшего через объект излучения производят с помощь матрицы детекторов в виде части коль ца при непрерывном вращении или диск ретном повороте сборки источник матрица детекторов вокруг исследуемого объекта. Этот способ позволяет использоват более простую подвеску, .но характери зуется большим машинным временем обработки информации и необходимостью введения всевозможных поправочных коэффициентов, связанных с использованием большого количества детекторов, чувствительность которых может различаться. Наиболее близким техническим реше нием является способ вычислительной томографии, заключающийся в облучении исследуемого объекта коллимированным пучком по заданному количеств траекторий регистрации прошедшего через объект излучения при относи тельном перемещении сборки источник детектор и исследуемого объекта, пре образовании зарегистрированного излу чения и обработке полученных данных на ЭВМ, в котором для вырезания коллимированного пучка из веерного пучка источника используют два вращающихся обтюратора, один из которых установлен вокруг источника, а другой - вокруг исследуемого объекта, причем в качестве матрицы детекторов используют газонаполненный координатный датчик. Недостатком известного технического решения является большое машинное время обработки, связанное с необходимостью переупаковки информации для проведения ее в определенную последовательность. Кроме того, известные решения не позволяют получать томограммы объектов в потоке. Цель изобретения заключается в том, чтобы повысить производительность способа за счет уменьшения требуемого для обработки машинного времени и обеспечения возможности получения томограмм объектов в потоке. Цель достигается тем, что в способе вычислительной радиационной томографии, заключающемся в облучении исследуемого объекта коллимированным пучком по заданному количеству совокупностей траекторий, регистрации прошедшего через объект излучения при относительном перемещении сборки источник-детектор и исследуемого объекта, преобразовании зарегистрированного излучения в электрический сигнал и обработке полученных данных на ЭВМ, производят перемещение объекта по окружности при расположении источника в точке, находящейся на линии центр окружности - детектор, одновременно вращают объект вокруг оси, расположенной на окружности поворота и фик-г сированной относительно объекта, причем скорости перемещения объекта и его вращения выбирают таким образом, что за время прохождения объекта поперек линии центр окружности - детектор объект совершает количество поворотов, равное заданному количеству совокупностей траекторий, а также дополнительно поворачивают объект вокруг оси вращения против & направления вращения на угол, равный углу видения из центра окружности прошедшей через линию центр окружности - детектор части объекта. При этом дополнительный поворот объекта вокруг оси вращения производят одновременно с вращением объекта путем уменьшения скорости вращения на величину, равную угловой скорости перемещения объекта по окружности. Альтернативно дополнительный поворот объекта производят дискретно после каждого полного оборота объекта BO время вращения на угол, равный 5 углу видения объекта из центра окруж ности, деленному на заданное количество совокупностей траекторий. На фиг,1 показана общая схема перемещения исследуемого объекта для получения томографической информации на фиг,2 - процесс получения информа ции при вращении объекта вокруг фиксированной оси; на фиг.З - то же, пр при перемещении объекта контроля по окружности; на фиг.4 - то же, при перемещении объекта вокруг фиксированной оси и одновременном перемещении по окружности; на фиг.З - процесс упорядочения информации при повороте объекта на дополнительный угол; на фиг.6 - общий вид полученно информации при всех поворотах и пере мещениях исследуемого объекта; на фиг.7 - один из вариантов одновременного контроля нескольких объектов от одного источника излучения. Способ осуществляют следующим образом. Исследуемые объекты 1 располагают на окружности 2, в центре которой размещают неподвижно источник излуче ния 3, а регистрацию излучения произ водят с помощью детектора 4. При это объект вращают вокруг фиксированных относительно исследуемых объектов осрй О на угол ioin до полного поворота на угол 2ii с угловой скоростью 03 g при постоянном значении угла С|. Затем объект перемещают по окружност с угловой скоростью СЭп на угол и Лс I где Ц) - угол перемещения объекта по окружности за время контроля N - требуемое число оборотов за время контроля, совпадающее с требуемым количеством сово купности траекторий пучка в исследуемом объекте для пост роения томографического изоб ражения . Одновременно объект поворачивают на дополнительный угол До -iCp, после чего снова вращают объект вокруг фик сированной оси. Процесс происходит при соотношении угловых скоростей вращения объекта (Ое и перемещения их поокружностиОЭп , равном СОв 2и СОп Щ Описанный способ позволяет контролировать одновременно от одного источника несколько объектов, каждый из которых может иметь форму, но его максимальный габаритный размер d должен вписываться в угол ер. При одновременном контроле нескольких объектов сбор информации может осуществляться за время прохождения тела в угле , а за время прохождения его во второй половине угла осуществляется его съем и простановка другого объекта исследования. Описанный вариант предполагает дискретный характер движений исследуемого объекта, а именно шаговое перемещение по окружности, оборот вокруг оси вращения в ее неподвижном положении на окружности поворота, дополнительный поворот после этого оборота и т.д. Также возможен непрерывный вариант реализации данного способа. В зтом случае скорость вращения объекта уменьшают на величину, равную угловой скорости перемещения объекта по окружности. Данный вариант характеризуется большей простотой выполнения механической части томографа, но одновременно более сложной схемой обработки сигналов детекторов. Использование описанного способа вычислительной радиационной томографии рассмотрим на примере исследования объектов с наибольшим габаритным размером в плоскости контроля d 100MM в варианте одновременного контроля четьфех объектов с помощью одного источника. Наибольший угол перемещения объекта по окружности за время контроля составляет 90 . Наименьший диаметр окружности, по которой расположены объекты, равен 145 мм. Измерение производят при вращении объектов вокруг фиксированных осей с угловой скоростью С0в через угловой интервал ,. При этом число измерений за полньй оборот на угол 2a:N(x , Число угловых направлений при перемещении по окружности объекта равно требуемому числу оборотов объекта за время контроля, что составляет . Следовательно, угловой интервал перемещения объекта по окружро СР рп ° стийЦ) i j 0,,0087 (рад).
а угловая скорость этого перемещения
Ш СОп СОЬ 0,0014(ОЬ
Общий объем информации при контроле одного объекта
2INi « NoCN 6А800
Общий объем информации при контроле четырех объектов одновременно составляет 1,952x10 сигналов.
Для упорядочения информации необходимо после каждого поворота объект на угол Zlt и перемещения его по окружности на 0,5, повернуть его на дополнительный угол u. 0,5.
Использование способа вычислительной радиационной томографии в соответствии с изобретением обеспечивает по сравнению с существующими способами осуществление возможности независимого контроля нескольких объектов одновременно от одного источника излучения, что позволяет увеличить производительность контроля, а также упрощение алгоритма обработки информации и сокращение времени обработки информации на ЭВМ за счет упорядочения результатов измерений в процессе сбора и отсутствия операции переупорядочения информации в ЭВМ, что сокращает время обсчета на 10-20% и уменьшает необходимый объем памяти ЭВМ.
,


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ радиационного контроля шаровых объектов | 1980 |
|
SU936697A1 |
| Способ радиационной вычислительной томографии | 1981 |
|
SU942502A1 |
| Радиационный вычислительный томограф для исследования изделий цилиндрической и сферической формы | 1980 |
|
SU845587A1 |
| Способ контроля изделий методом вычислительной томографии | 1982 |
|
SU1082119A1 |
| Способ вычислительной томогра-фии и ТОМОгРАф для ЕгО РЕАлизА-ции | 1979 |
|
SU807173A1 |
| Способ вычислительной рентгеновской томографии и рентгеновский томограф для осуществления способа | 1979 |
|
SU857815A1 |
| Способ радиационной вычислительной томографии | 1980 |
|
SU884402A1 |
| Устройство для радиационного контроля стержневых ТВЭЛов | 1981 |
|
SU972347A1 |
| Поперечный гамма-томограф | 1980 |
|
SU955905A1 |
| Способ радиационной вычислительной томографии | 1987 |
|
SU1424480A1 |

1. СПОСОБ ВЫЧИСЛИТЕЛЬНОЙ РАДИАЦИОННОЙ ТОМОГРАФИИ, заключающийся в облучении исследуемого объекта коллимированным пучком по заданно му количеству-.совокупностей траекторий, регистрации прошедшего через объект излучения при относительном перемещении Сборки источник-детектор и исследуемого объекта, преобразовании зарегистрированного излучения в электрический сигнал и обработке полученных данных на ЭВМ, отличающийся тем, 4TOj с целью повышения производительности, производят перемещение объекта по окружности при расположении источника в точке, находящейся на линии центр окружности-детектор, одновременно вращают объект вокруг оси, расположенной на окружности поворота и фик- сированной относительно объекта, причем скорости перемещения объекта и его вращения выбирают таким образом, что за время прохождения объекта поперек линии центр окружности детектор объект совершает количество поворотов, равное заданному количеству совокупностей траекторий, а также дополнительно поворачивают объект вокруг оси вращения против направления вращения на угол, равный величине угла видения из центра окружности, прошедшей через линию центр окружности - детектор, части объекта. 2.Способ по П.1, о тлич ающ и и с я тем, что дополнительный (Л поворот объекта вокруг оси вращения производят одновременно с вращением .объекта путем уменьшения скорости вращения на величину, равную угловой .скорости перемещения объекта по ок-vj ружности. С5 3,Способ по П.1, отличаюсз ;Щ и и с я тем, что дополнительный to поворот объекта производят дискретно С5 после каждого полного оборота объекта Nt на время вращения на угол, равный углу видения объекта из центра окружности, деленному на заданное количество совокупностей траекторий.
ФтЛ
| Устройство для управления трехфазным инвертором | 1985 |
|
SU1283915A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Вылож | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОДВОДНОГО АППАРАТА ДЛЯ ТРАНСПОРТИРОВКИ УГЛЕВОДОРОДОВ "CH" ИЗ ДОННЫХ МЕСТОРОЖДЕНИЙ МОРЕЙ И ОКЕАНОВ (ВАРИАНТ РУССКОЙ ЛОГИКИ - ВЕРСИЯ 5) | 2015 |
|
RU2600266C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Вылож | |||
| УСТРОЙСТВО КОНТРОЛЯ ПРИТОКА | 2020 |
|
RU2738045C1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
