Настоящее изобретение относится к компьютерной томографии (СТ). Настоящее изобретение находит применение, в частности, в рентгеновской СТ для медицинских целей. Настоящее изобретение находит применение при контроле изделий и безопасности, неразрушающем контроле, доклинической визуализации и в других ситуациях, в которых СТ-данные (данные компьютерной томографии) могут предоставлять полезную информацию о структуре или функции объекта.
Одна из областей, в которой СТ-системы (компьютерно-томографические системы) визуализации получили широкое распространение, является медициной, где СТ-сканеры (компьютерно-томографические сканеры) широко применяются рентгенологами и другими медицинскими специалистами в связи с диагностикой и лечением заболеваний. Многослойные системы, принятые сравнительно недавно, дополнительно расширили диапазон клинического применения СТ-систем.
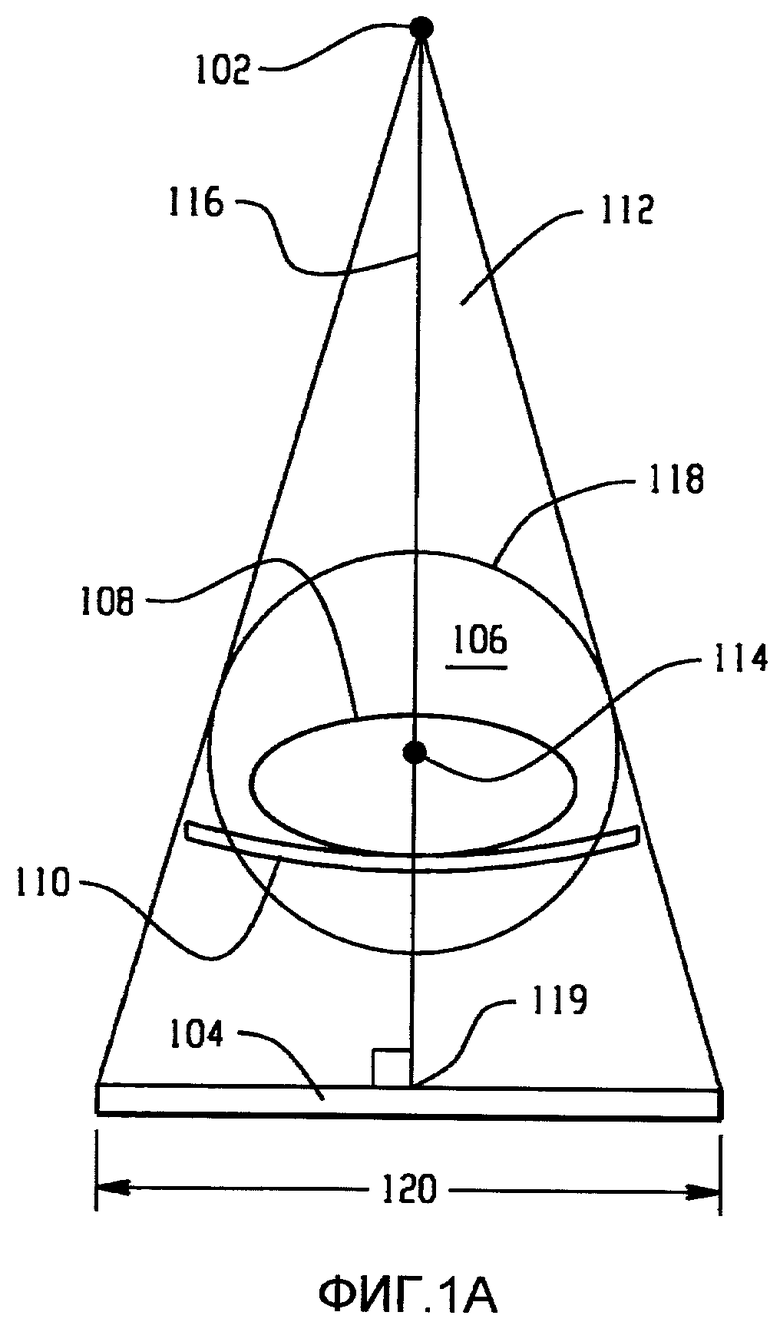
Геометрия сбора данных традиционной рентгеновской СТ-системой третьего поколения, содержащей плоский детектор, представлена на фигуре 1А. На фигуре 1А показана трансаксиальная плоскость системы, например центральная плоскость системы с коническим пучком. Рентгеновский источник 102 и рентгеночувствительный детектор 104 расположены с противоположных сторон области 106 исследования и радиально расположены от оси 114 вращения. Пациент или другой объект 108, подлежащий исследованию, опирается в области 106 исследования на подходящую опору 110. Источник 102 испускает излучение 112, которое пересекает область 106 исследования и регистрируется детектором 104 по мере того, как источник 102 и детектор 104 поворачиваются вокруг оси 114 вращения.
В показанной геометрической схеме с захватом всего пучка, центральный луч или проекция 116 рентгеновского пучка 112 пересекает ось 114 вращения и перпендикулярен к детектору в поперечном центре 119. Поперечный размер 120 детектора является таким, что детектор 104 регистрирует излучение 112, которое пересекло все поперечное FOV (поле обзора) 118 под каждым углом проекции. Таким образом, полное взятие угловых отсчетов поперечного FOV по углу около 180°, плюс по поперечному углу веерного рентгеновского пучка. Хотя геометрическая схема показана для плоского детектора, следует понимать, что геометрическая схема с захватом всего пучка применима также к системам, в которых детектор 104 имеет, в общем, дугообразную форму.
Однако, в общем, желательно уменьшать физический размер детектора, необходимый для достижения заданного поперечного FOV. Например, детекторы сравнительно большего размера обычно сложнее и дороже в изготовлении. Кроме того, размер имеющихся детекторных решеток может оказаться ограничивающим фактором при проектировании системы. Упомянутые соображения становятся особенно важными в связи с широким распространением многослойных систем, и, в частности, когда на относительно более крупные детекторы для многослойной съемки приходится большая часть общей стоимости системы.
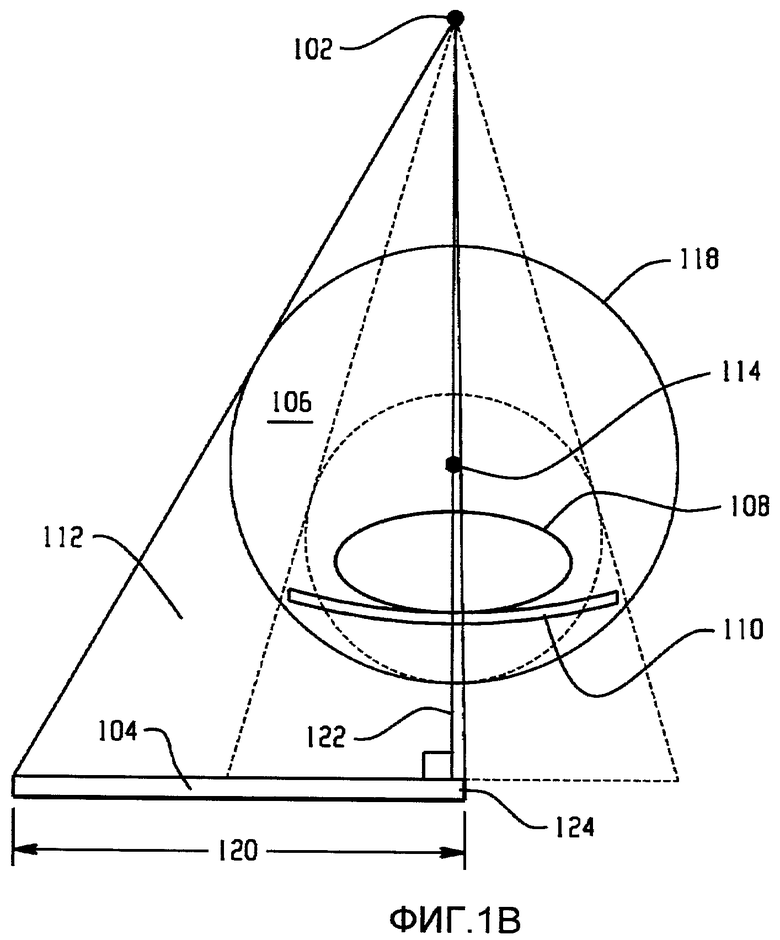
Предлагалась также геометрия с захватом половины пучка, показанная на фигуре 1В. Смотри, например, Gregor, et al., Conebeam X-ray Computed Tomography with an Offset Detector, IEEE 2003 (2003); Wang, et al., X-ray Micro-CT with a Displaced Detector Array, Med. Phys. 29 (7), July 2002; Lin, et al., Half Field of View Reduced-Size CT Detector, PCT публикация WO 00/62647, 26 октября 2000 г.
По сравнению с геометрией захвата всего пучка, детектор 104 сдвинут в поперечном направлении на, приблизительно, половину его поперечного размера 120. Луч или проекция 122, который пересекает ось 114 вращения, перпендикулярен плоскости детектора 104. При заданном угле проекции, детектор 104 регистрирует излучение, которое пересекает, приблизительно, половину поперечного FOV 118 (следует отметить, что совмещенная или переходная область 124 обеспечивает сбор данных проекций в центральной области поперечного FOV 118). Хотя геометрическая схема с захватом половины пучка обеспечивает относительно большее поперечное FOV по сравнению с геометрической схемой с захватом всего пучка (которая показана для сравнения пунктирными линиями на фигуре 1В), полное взятие угловых отсчетов поперечного FOV требует сбора данных в угловом диапазоне около 360°. Кроме того, упомянутая система нуждается в том, чтобы пластины или диафрагма антирассеивающей решетки продолжались в поперечном направлении или в применении специальной асимметричной антирассеивающей решетки.
Следовательно, возможность усовершенствований еще остается. Например, целесообразно дополнительно повысить степень использования детектора, при сохранении подходящего качества изображения. Целесообразно также упростить конструкцию системы.
Таким образом, цель настоящего изобретения состоит в обеспечении небольшого по размеру детектора для достижения заданного поперечного поля обзора.
Аспекты настоящего изобретения касаются упомянутых и других задач.
В соответствии с одним аспектом настоящего изобретения, устройство собирает данные томографических проекций во множестве угловых положений относительно объекта, расположенного в области исследования. Устройство содержит источник излучения и детектор, чувствительный к излучению, который регистрирует испускаемое источником излучение, которое пересекло область исследования. Как источник, так и поперечный центр детектора поперечно смещены относительно центра поперечного поля обзора во время сбора данных проекций.
В соответствии с другим аспектом, способ компьютерной томографии содержит этап, заключающийся в том, что испускают излучение из позиции, которая поперечно смещена относительно центра поперечного поля обзора. Излучение пересекает участок поперечного поля обзора. Способ содержит также этап, заключающийся в том, что используют детектор излучения для сбора данных компьютерно-томографических проекций, характеризующих излучение. Детектор поперечно смещен относительно центра поперечного поля обзора. Способ содержит также этап повторения этапов испускания и использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих излучение под каждым из множества углов проекций для сбора множества СТ-данных, и этап реконструкции множества СТ-данных для формирования объемных данных.
В соответствии с другим аспектом, компьютерное томографическое устройство содержит рентгеновский источник, рентгеновский детектор и блок реконструкции. Рентгеновский источник поперечно смещен и поворачивается относительно оси вращения. Рентгеновский детектор регистрирует излучение, испускаемое рентгеновским источником, и поперечно смещен от оси вращения. Рентгеновский детектор поворачивается относительно оси вращения в состоянии постоянной механической связи с рентгеновским источником для сбора данных проекций под множеством углов проекций. Рентгеновский источник испускает излучение, характеризующееся поперечным углом веерного пучка, полное взятие угловых отсчетов поперечного поля обзора требует сбора данных проекций в большем угловом диапазоне, чем 180° плюс угол веерного пучка. Блок реконструкции реконструирует данные проекций для формирования объемных данных, характеризующих поперечное поле обзора.
Дополнительные аспекты настоящего изобретения станут очевидными специалистам со средним уровнем компетенции в данной области техники после прочтения и изучения нижеследующего подробного описания.
Изобретение можно реализовать в форме различных компонентов и схем расположения компонентов и в форме различных этапов и схем расположения этапов. Чертежи предназначены только для иллюстрации предпочтительных вариантов осуществления и не подлежат истолкованию в смысле ограничения изобретения.
Фигура 1А - трансаксиальный вид известной геометрической схемы сбора СТ-данных с захватом всего пучка.
Фигура 1В - трансаксиальный вид известной геометрической схемы сбора СТ-данных с захватом половины пучка.
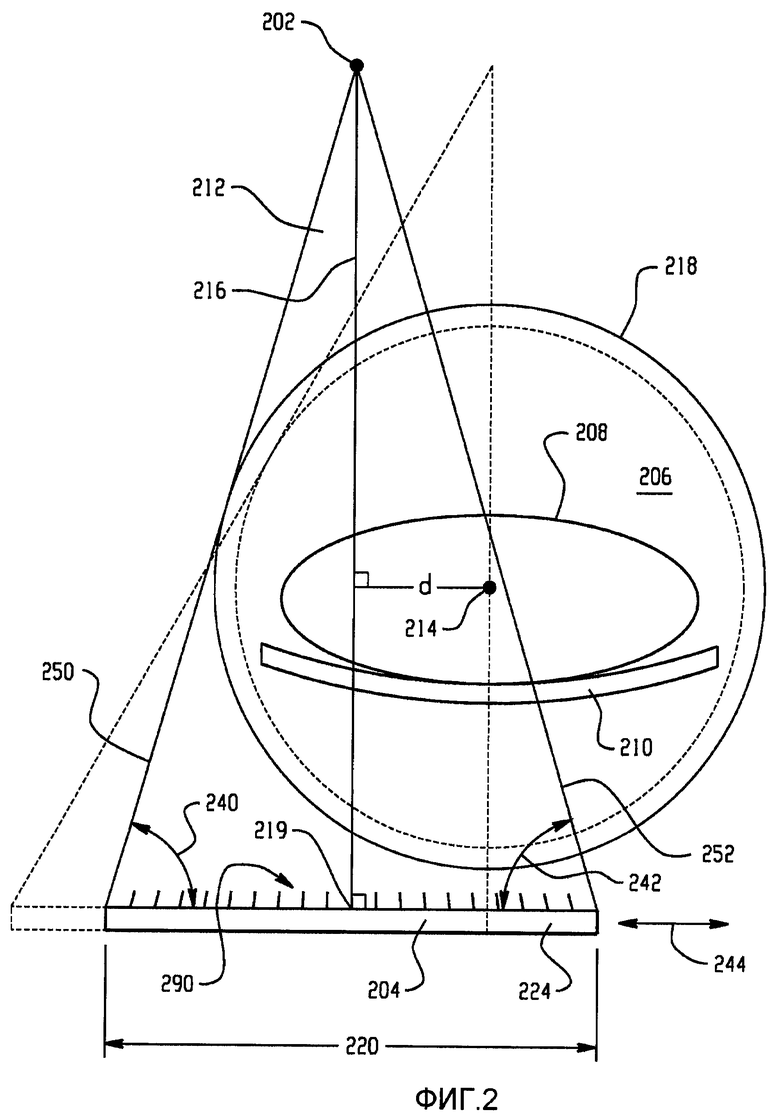
Фигура 2 - трансаксиальный вид смещенной геометрической схемы сбора СТ-данных.
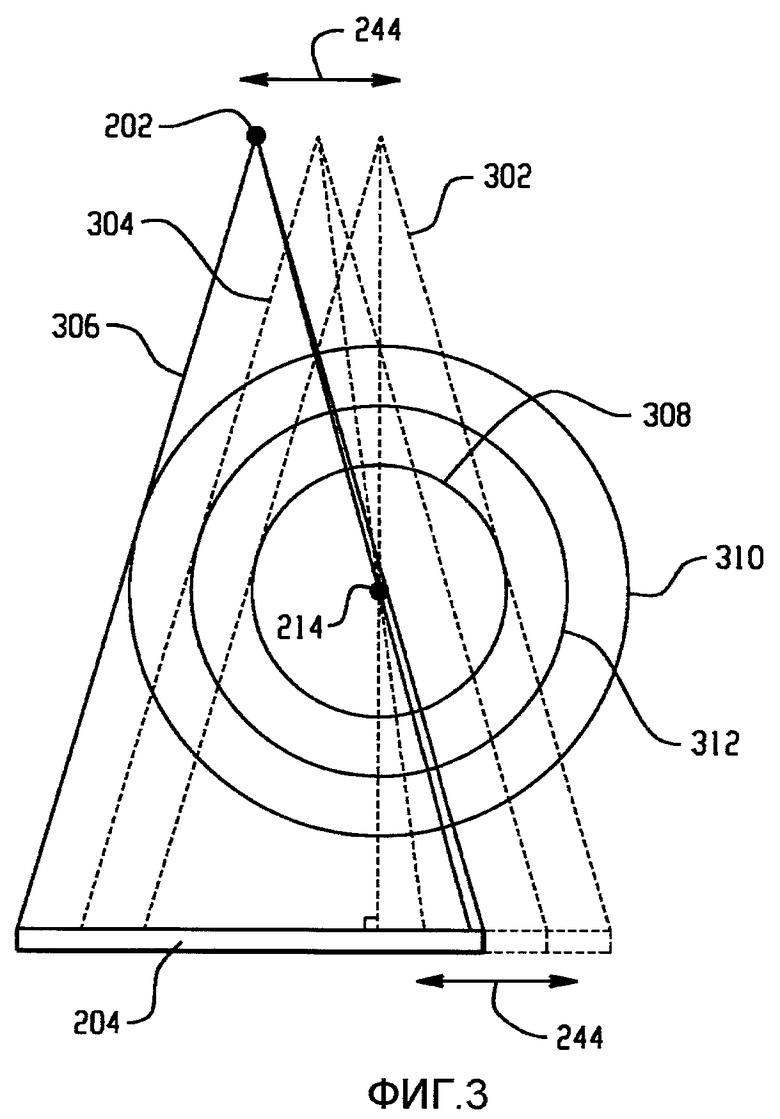
Фигура 3 - трансаксиальный вид геометрической схемы сбора СТ-данных с изображением источника и детектора, смещенных относительно области визуализации.
Фигура 4 - трансаксиальный вид геометрической схемы сбора СТ-данных с изображением источника и детектора, смещенных относительно области визуализации.
Фигура 5 - трансаксиальный вид геометрической схемы сбора СТ-данных с изображением источника и детектора, смещенных относительно области визуализации.
Фигура 6 - трансаксиальный вид геометрической схемы сбора СТ-данных.
Фигура 7 - трансаксиальный вид геометрической схемы сбора СТ-данных.
Фигура 8 - изображение системы визуализации.
Фигура 9 - изображение системы визуализации.
Усовершенствованная геометрическая схема сбора СТ-данных с двойным смещением, в которой как источник, так и детектор смещены от изоцентра визуализации, показаны на фигуре 2. Как показано, стол или другая подходящая опора 210 объекта поддерживает исследуемый объект 208 в области 206 исследования. Рентгеновский источник 202, например, рентгеновская трубка, и рентгеночувствительный детектор 204, например, детекторная решетка с плоской чувствительной поверхностью, продолжающийся в поперечном и осевом направлениях, поворачиваются относительно оси 214 вращения, которая выполняет также функцию центра поперечного FOV 218. Центральный(ая) луч или проекция 216 рентгеновского пучка 212 перпендикулярен к детектору в поперечном центре 219, но смещен относительно оси 214 вращения.
Антирассеивающая решетка 290 расположена между детектором 204 и областью 206 исследования для ослабления рассеянного излучения, принимаемого детектором 204. Решетка 290 содержит множество пластин, сфокусированных на источнике 202, так что решетка является симметричной в поперечном направлении относительно поперечного центра 219 детектора. Следует понимать, что упомянутая симметрия упрощает конструкцию системы. Возможна также реализация двумерной (2-мерной) антирассеивающей решетки, например решетки с пластинами, продолжающимися как в поперечном, так и в продольном направлениях.
Как показано, минимальное расстояние смещения между центральным лучом 216 и изоцентром 214 равно d. Поперечное смещение детектора 204 подбирают так, чтобы минимизировать максимально допустимый угол, под которым детектор 204 принимает излучение. Когда детектор 204 представляет собой плоский детектор, углы 240, 242 падения, под которыми крайние лучи 250, 252 рентгеновского пучка 212 пересекают детектор 204, равны. Как показано, в данной схеме также обеспечена переходная область 224.
Поперечное FOV 218 больше, чем в сравнимой геометрической схеме с захватом половины пучка, которая показана пунктирной линией на фигуре 2 для пояснения. При заданных поперечном размере 220 детектора и радиальном расстоянии между источником 202 и осью 214 вращения размер поперечного FOV 218 можно изменять путем изменения расстояния d между центральным лучом 216 и осью 214 вращения. Случай, в котором центральный луч 216 пересекает ось 214 вращения (т.е. когда d=0), соответствует геометрической схеме с захватом всего пучка, показанной на фигуре 1А. В конфигурации с максимальным FOV, для полного взятия угловых отсчетов необходим поворот приблизительно на 360°, тогда как в геометрической схеме с захватом всего пучка поворот на 180° плюс на угол веерного или конического пучка обеспечивает полное взятие угловых отсчетов. Необходимый угловой интервал для промежуточных конфигураций изменяется от 180° плюс угол веерного пучка до 360° и может быть легко вычислен.
Описанную геометрическую схему сбора данных можно легко реализовать различными способами. Как показано на фигуре 3, как источник 202, так и детектор 204 сдвинуты в направлении 244 параллельно плоскости детектора 204, при сохранении центра визуализации и оси 214 вращения без изменения относительно сравнимой геометрической схемы сбора данных с захватом всего или половины пучка. Для простоты иллюстрации, на фигуре 3 не показаны исследуемый объект 208, опора 210 объекта и защитная решетка 290 от рассеяния.
Как показано, направление смещения 244 является тангенциальным относительно поперечного FOV. На фигуре 3 показаны источник 202 и детектор 204, сдвинутые в примерные первое 302, второе 304 и третье 306 положения. Первое положение 302 соответствует геометрической схеме с захватом всего пучка, показанной на фигуре 1А. Данная схема обеспечивает минимальное поперечное FOV 308, и полное множество данных собирается в угловом диапазоне 180° плюс угол веерного или конического пучка. Третье положение 306 обеспечивает максимальное поперечное FOV 310; полное множество данных собирается в угловом диапазоне приблизительно 360°. Второе положение 304 отражает произвольное промежуточное положение, которое обеспечивает промежуточное поперечное FOV 312; аналогично, данные собираются в промежуточном угловом диапазоне. Хотя источник 202 и детектор 204 показаны в нескольких положениях для пояснения относительного смещения источника 202 и детектора, следует понимать, что источник 202 и детектор 204 предпочтительно удерживаются в заданном положении во время взятия отсчетов в необходимом угловом диапазоне.
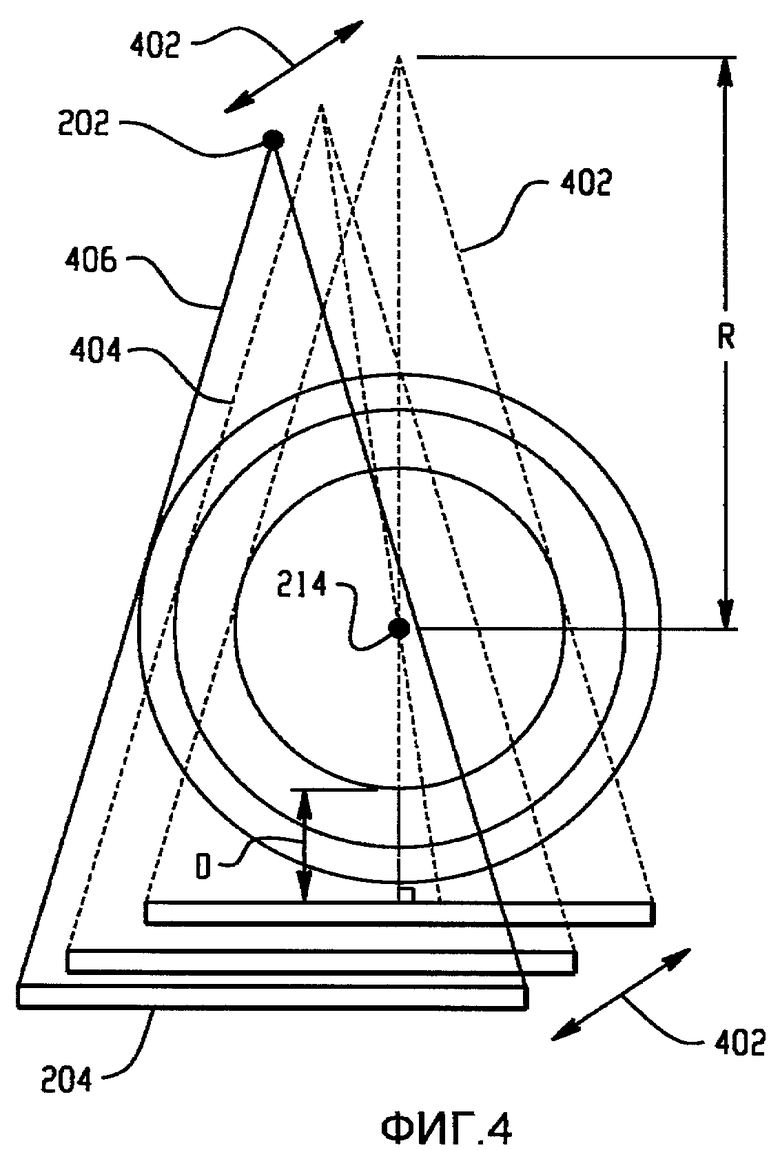
Другой метод обеспечения геометрической схемы сбора данных со смещением показан на фигуре 4. Как показано, как источник 202, так и детектор 204 сдвинуты в направлении 402, для которого минимальное расстояние D между детектором 204 и краем поперечного FOV остается постоянным. И вновь, источник 202 и детектор 204 показаны в первом 402, втором 404, и третьем положениях 406, которые обеспечивают последовательно увеличенные поперечные FOV. Следует также отметить, как показано, что радиальное смещение R источника 202 от оси 214 вращения сравнительно больше смещения, показанного на фигуре 2. Такая схема расположения дополнительно увеличивает поперечное FOV.
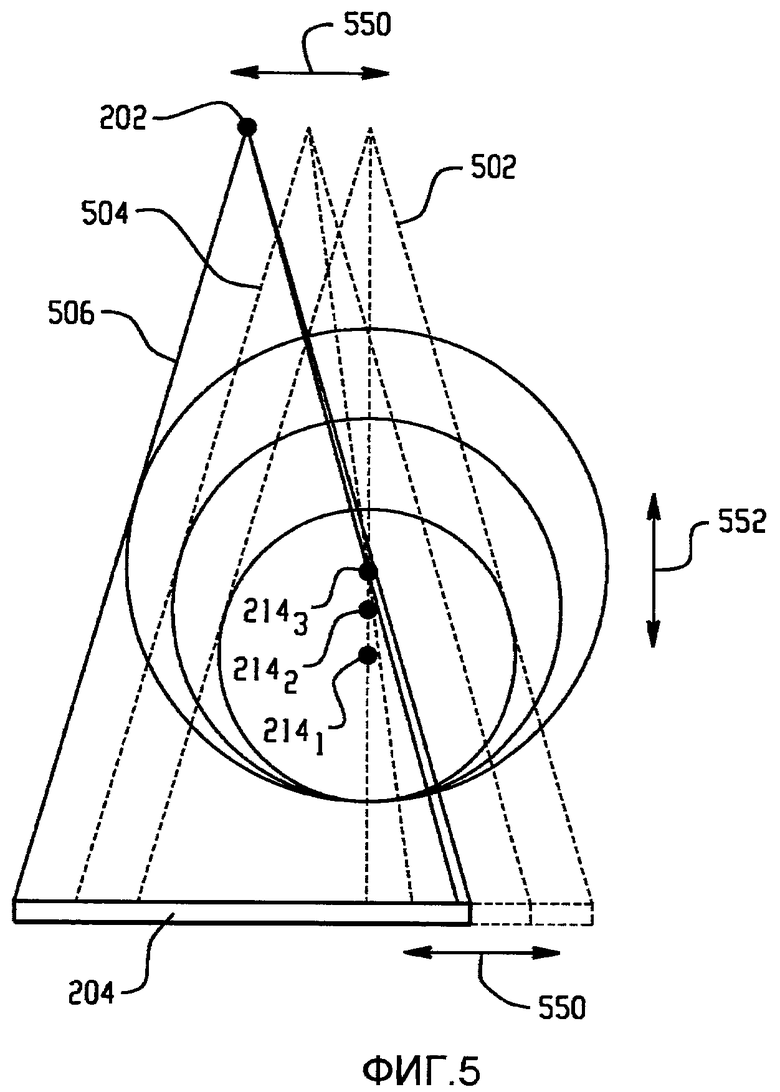
Еще один метод обеспечения смещенной геометрической схемы сбора данных показан на фигуре 5. Как показано, источник 202 и детектор 204 сдвигают в тангенциальном направлении 550 относительно поперечного FOV, тогда как центр визуализации смещают в направлении 552, которое перпендикулярно поперечному FOV или главной плоскости детектора 204. И вновь, источник 202 и детектор 204 показаны в первом 502, втором 504 и третьем 506 положениях. Показаны также соответствующие первая 2141, вторая 2142 и третья 2143 оси вращения. Следует понимать, что показанная схема расположения обеспечивает геометрическую схему сбора данных, идентичную геометрической схеме на фигуре 4.
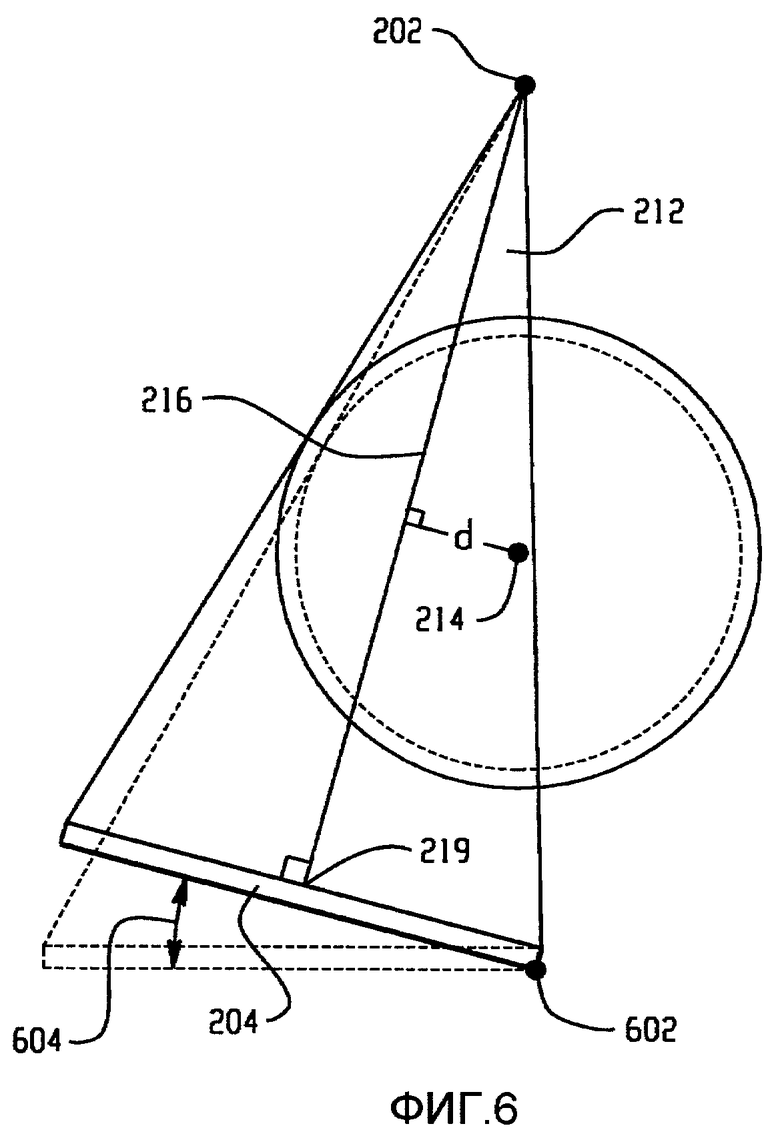
Еще один метод обеспечения смещенной геометрической схемы сбора данных показан на фигуре 6. Как показано, детектор 204 повернут относительно оси 602 поворота на угол 604, так что луч 214 рентгеновского пучка 212, который пересекает поперечный центр 219 детектора 204, перпендикулярен плоскости детектора 204. Размер поперечного FOV можно настраивать изменением угла 604, по желанию. Случай, в котором угол 604 равен нулю (0), соответствует геометрической схеме с захватом половины пучка, показанной на фигуре 1В, которая показана пунктирной линией на фигуре 6 для пояснения.
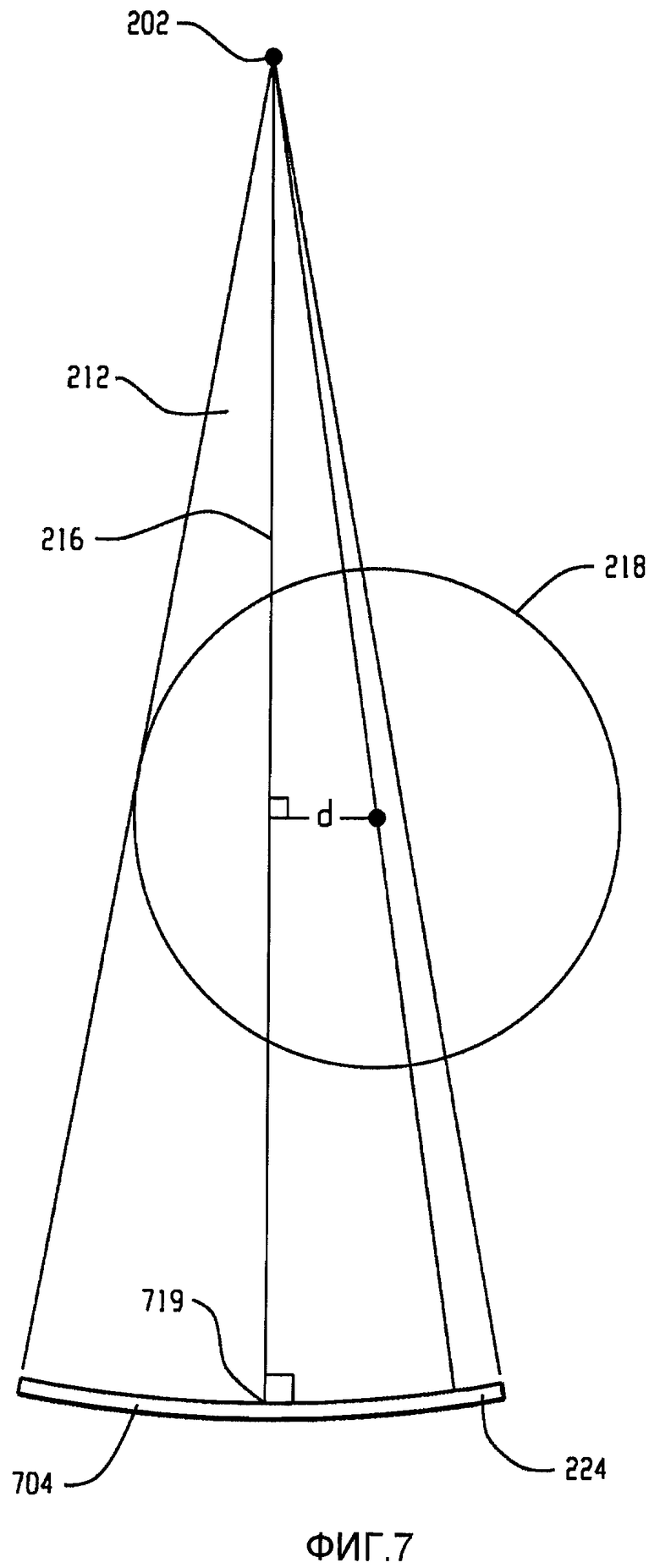
Хотя вышеприведенное описание относится к плоским детекторам, возможно применение дугообразных детекторов. Геометрическая схема сбора данных для системы, содержащей детектор 704, который опирается на участок круговой дуги, расположенной по центру относительно поперечного положения рентгеновского источника 202, показана на фигуре 7. Центральный луч или проекция 216 рентгеновского пучка 212 проходит перпендикулярно к касательной к дуге детектора 704 в центре детектора 719, но со смещением относительно оси 206 вращения на расстояние d. Как показано, переходная область 224 также обеспечена. Как должно быть очевидно специалистам в данной области техники, вышеприведенное описание со ссылками на фигурах 2-6 применимо к детектору дугообразной конфигурации.
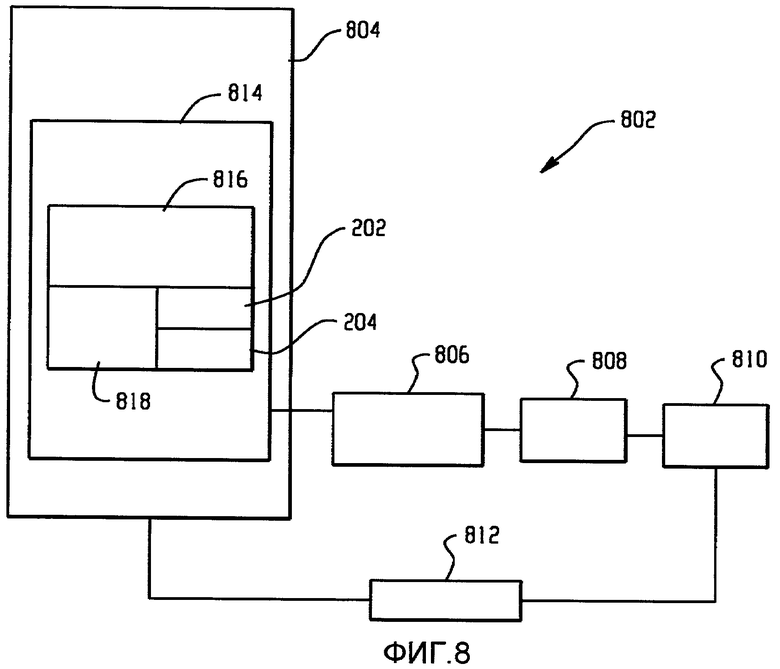
На фигуре 8 показана система 802 визуализации, пригодная для применения с геометрической схемой сбора данных с двойным смещением. Система 802 содержит систему 804 сбора данных, блок 806 реконструкции, процессор 808 изображений, пользовательский интерфейс 810 и контроллер 812.
Система 804 сбора данных содержит систему 814 сбора СТ-данных, в которой источник 202 и детектор 204 установлены на поворотном гентри 816 для поворота вокруг области исследования. Посредством, например, продольного перемещения опоры 210 объекта согласованно с поворотом поворотного гентри 816 можно реализовать аксиальную, спиральную, круговую и линейную, седловидную или другую искомую траектории сканирования в кольцевом, 360° или другом угловом диапазоне взятия отсчетов.
В одной реализации источник 202 и детектор 206 установлены неподвижно относительно поворотного гентри 816, и поэтому геометрическая схема сбора данных является фиксированной. В другой реализации, источник 202 и детектор установлены с возможностью перемещения на поворотном гентри 816, и поэтому геометрическая схема сбора данных является регулируемой, например, с обеспечением возможности относительного перемещения, показанного выше на фигурах 3-7. В подобной реализации, по меньшей мере, один привод 818 может обеспечивать необходимое движущее усилие.
В качестве альтернативы, источник 202 и детектор 204 могут перемещаться вручную пользователем. В каждом случае, источник 202 и детектор 204 предпочтительно установлены на общей раме или таким иным способом, что физическая взаимосвязь между источником 202 и детектором 204 не изменяется при переходе от одной конфигурации FOV к другой, так как подобное исполнение снижает потребность в отдельных холостых или калибровочных сканированиях.
Блок 806 реконструкции реконструирует данные, сформированные системой 804 сбора данных, с использованием известных методов реконструкции для формирования объемных данных, характеризующих исследуемый объект. Подходящие методы реконструкции содержат аналитические методы, например, восстановление методом фильтрованных обратных проекций, а также итеративные методы. Один метод, который хорошо подходит для реконструкции данных с коническим пучком, представляет собой известный алгоритм Фельдкампа. Когда геометрическая схема сбора данных обеспечивает переходную зону 224, для ослабления эффектов избыточности данных в переходной зоне 224м можно применить функцию сглаживания.
Процессор 808 изображений обрабатывает объемные данные, как требуется, например, для отображения искомым образом на пользовательском интерфейсе 810, который может содержать, по меньшей мере, одно устройство вывода, например, монитор и принтер, и, по меньшей мере, одно устройство ввода, например, клавиатуру и мышь.
Пользовательский интерфейс 810, который предпочтительно реализован с использованием программных команд, исполняемых универсальным или другим компьютером, для обеспечения графического пользовательского интерфейса (GUI), позволяет пользователю управлять или иначе взаимодействовать с системой 802 визуализации, например, посредством выбора требуемой конфигурации или размеров FOV, запуска и/или прекращения сканирований, выбора искомого протокола сканирования или реконструкции, манипулирования объемными данными и т.п. В одной реализации, конфигурация FOV и протокол реконструкции или то и другое устанавливаются автоматически системой 802 визуализации на основе протокола сканирования, выбранного пользователем. В еще одном примере, пользовательский интерфейс 810 может предлагать или иначе позволять пользователю вводить требуемый поперечный радиус, диаметр или другой размер FOV. В подобной реализации информация от пользователя применяется для автоматического вычисления требуемого(ых) положения(ий) источника 102 и/или детектора 104.
Контроллер 812, функционально соединенный с пользовательским интерфейсом 810, управляет работой системы 704 сбора данных, например, чтобы выполнять требуемый протокол сканирования, приводить в действие привод(ы) 818 для позиционирования источника 102 и/или детектора 104 и, тем самым, для обеспечения искомого FOV и т.п.
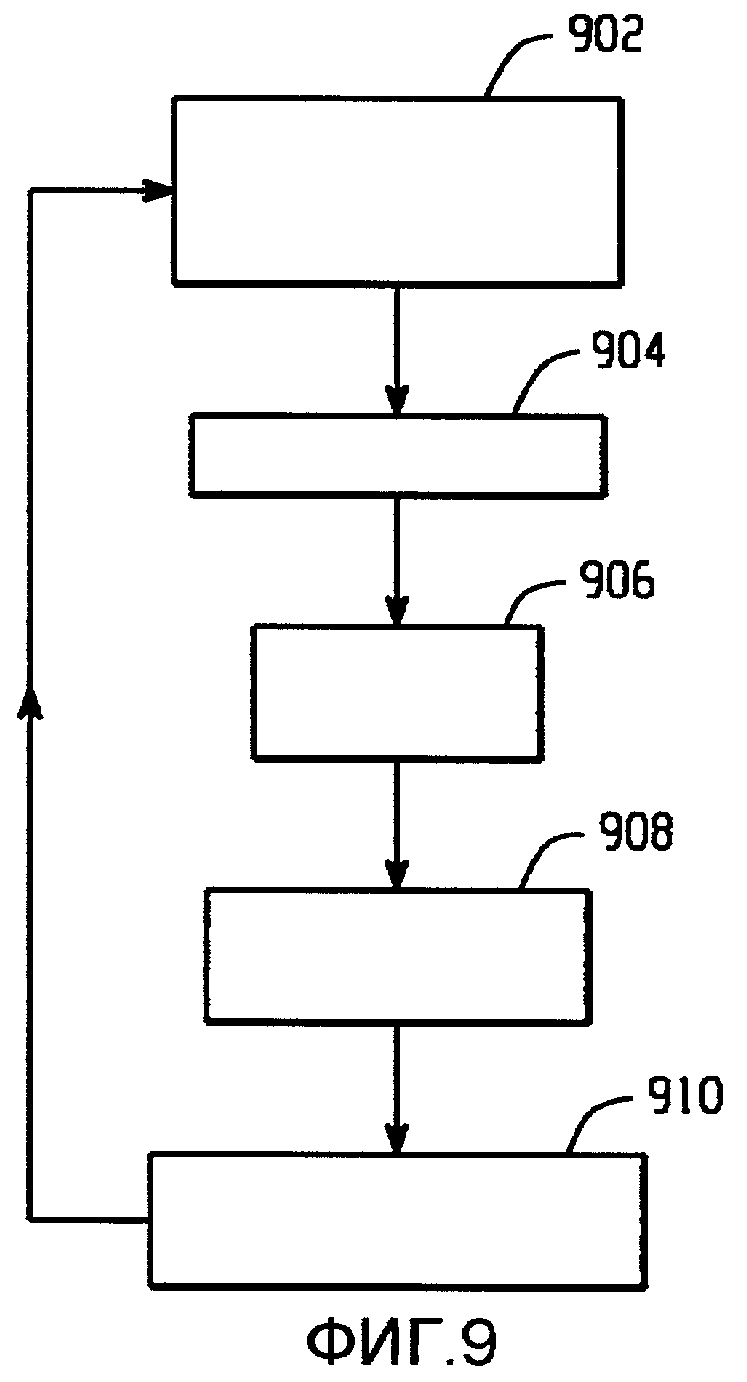
Ниже приведено описание порядка работы системы 802 визуализации со ссылкой на фигуру 9. В случае системы 802 сбора данных, которая обеспечивает настраиваемую конфигурацию FOV, положения источника 202 и детектора 204 настраивают для получения требуемой конфигурации FOV на этапе 902. В одном примере, настройка геометрической схемы для обеспечения максимального поперечного FOV может быть необходима для сканирования груди крупного пациента, тогда как настройка геометрической схемы до конфигурации с захватом всего пучка может быть достаточна для выполнения сканирования мозга.
Данные сканирования собирают на этапе 904 для сбора данных проекций в каждом из множества угловых положений относительно области 206 исследования. Необходимый угловой диапазон взятия отсчетов поперечной FOV 206 также зависит от выбранной конфигурации FOV. Следует отметить, что положение источника 202 и детектора может оставаться без изменений во время взятия необходимых угловых отсчетов.
Данные сканирования реконструируют на этапе 906 и отображают в требуемом формате на этапе 908.
На этапе 910, процесс повторяют по требованию, например, для последующего сканирования пациентов. Следует отметить, что до реконструкции и/или отображения данных, собранных в процессе заданного сканирования, можно получить дополнительное(ые) сканирование(я).
Хотя вышеизложенное описание касается рентгеновской СТ-системы, в которой источник 202 является фокусом рентгеновской трубки и, следовательно, по существу, точечным источником, предполагается возможность альтернативных вариантов. Например, источник 202 может быть реализован в виде линейного источника. Возможны также геометрические схемы с клиновидным и другими пучками. Возможно также использование источников гамма- и другого излучения. Вместо поворота источника 202 и детектора 204 вокруг области 206 исследования, источник 202 и детектор 204 могут оставаться в постоянном положении по углу, тогда объект 208 перемещается и/или поворачивается для обеспечения необходимого взятия угловых отсчетов. Возможен также вариант с обеспечением нескольких источников 202 и детекторов 204, при этом соответствующие наборы источников и детекторов могут быть смещены по углу и/или продольно один относительно другого. Следует отметить, что в системах, содержащих несколько смещенных по углу источников и детекторов, поворот, необходимый для обеспечения диапазона полного взятия угловых отсчетов, обычно уменьшен по сравнению с системами, содержащими единственную пару источник/детектора, и соответственно можно настраивать траекторию.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. После прочтения и изучения вышеприведенного подробного описания другими специалистами могут быть созданы модификации и изменения. Предполагается, что изобретение следует трактовать как охватывающее все подобные модификации и изменения в то степени, в которой они не выходят за пределы объема притязаний прилагаемой формулы изобретения или ее эквивалентом.
Изобретение относится к компьютерной томографии. Устройство для сбора данных томографических проекций во множестве угловых положений относительно объекта, расположенного в области исследования, содержит источник излучения, детектор, при этом источник и поперечный центр детектора поперечно смещены от центра поперечного поля обзора во время сбора данных проекций, причем направление поперечного смещения является тангенциальным относительно поперечного поля обзора. Способ компьютерной томографии содержит этапы, на которых испускают первое излучение из позиции, которая поперечно смещена от центра поперечного поля обзора, используют детектор излучения для сбора данных компьютерно-томографических проекций, повторяют этапы испускания первого излучения и использования детектора излучения для сбора данных компьютерно-томографических проекций и реконструируют первое множество СТ данных для формирования первых объемных данных. Компьютерное томографическое устройство содержит рентгеновский источник, поперечно смещенный от оси вращения, рентгеновский детектор, также поперечно смещенный от оси вращения и поворачивающийся относительно оси вращения в состоянии постоянной механической связи с рентгеновским источником. При этом рентгеновский источник испускает излучение, характеризующееся поперечным углом веерного пучка, а полное взятие угловых отсчетов поперечного поля обзора требует сбора данных проекций в большем угловом диапазоне, чем 180° плюс угол веерного пучка. Устройство содержит также блок реконструкции данных проекций для формирования объемных данных, характеризующих поперечное поле обзора. 3 н. и 36 з.п. ф-лы, 10 ил.
1. Устройство для сбора данных томографических проекций во множестве угловых положений относительно объекта (208), расположенного в области (206) исследования, при этом устройство содержит:
источник (202) излучения;
детектор (204, 704), чувствительный к излучению, который регистрирует испускаемое источником излучение (212) после того, как излучение пересекло область исследования;
при этом как источник, так и поперечный центр (219, 719) детектора поперечно смещены от центра (214) поперечного поля (218) обзора во время сбора данных проекций, причем направление поперечного смещения является тангенциальным относительно поперечного поля обзора.
2. Устройство по п.1, содержащее блок (806) реконструкции, который реконструирует данные проекций для формирования объемных данных, характеризующих объект.
3. Устройство по п.1, в котором источник и детектор поворачиваются вокруг оси вращения и при этом ось вращения является центром поперечного поля обзора.
4. Устройство по п.1, в котором данные проекций являются данными рентгеновской компьютерной томографии.
5. Устройство по п.1, в котором источник испускает пучок (212) излучения, имеющий, в общем, веерообразное поперечное сечение, при этом поперечное сечение содержит луч (216), который перпендикулярен детектору, и причем луч поперечно смещен от центра поперечного поля обзора.
6. Устройство по п.5, в котором детектор содержит поперечный центр (219, 719) и луч пересекает поперечный центр.
7. Устройство по п.5, в котором луч является центральным лучом пучка излучения.
8. Устройство по п.5, в котором детектор является плоским детектором.
9. Устройство по п.1, в котором источник испускает пучок (212) излучения, имеющий, в общем, веерообразное поперечное сечение, при этом поперечное сечение содержит первый (250) и второй (252) крайние лучи и крайние лучи пересекают детектор под равными углами (240, 242) падения.
10. Устройство по п.1, в котором детектор содержит переходную зону (224), в которой детекторы формируют избыточные данные проекций.
11. Устройство по п.1, содержащее средство для изменения положения источника и детектора относительно центра поперечного поля обзора, чтобы обеспечивать геометрическую схему с захватом всего пучка.
12. Устройство по п.1, содержащее средство для сдвига источника и детектора в поперечном направлении (244), которое параллельно главной плоскости детектора.
13. Устройство по п.12, содержащее средство для смещения оси вращения в направлении (552), которое перпендикулярно поперечному полю обзора.
14. Устройство по п.1, содержащее средство для сдвига источника и детектора в поперечном направлении (402), для которого минимальное расстояние между детектором и краем поперечного поля обзора остается постоянным.
15. Устройство по п.1, содержащее средство для поворота источника и детектора вокруг оси поворота так, чтобы изменять размер поперечного поля обзора.
16. Устройство по п.1, содержащее пользовательский интерфейс (810), который принимает ввод пользователя, указывающий требуемый размер поперечного поля обзора, и при этом устройство использует требуемый размер для определения требуемого положения детектора.
17. Устройство по п.1, при этом устройство собирает данные томографических проекций по спиральной траектории сканирования.
18. Устройство по п.1, в котором устройство собирает данные томографических проекций по приблизительно 360° осевой траектории сканирования.
19. Способ компьютерной томографии, содержащий этапы, на которых:
испускают первое излучение (212) из позиции, которая поперечно смещена от центра (214) поперечного поля (218) обзора, при этом первое излучение пересекает участок поперечного поля обзора;
используют детектор (204, 704) излучения для сбора данных компьютерно-томографических проекций, характеризующих первое излучение, при этом детектор поперечно смещен от центра поперечного поля обзора, причем направление поперечного смещения является тангенциальным относительно поперечного поля обзора;
повторяют этапы испускания первого излучения и использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих первое излучение, под каждым из множества углов проекций для сбора первого множества СТ-данных;
реконструируют первое множество СТ-данных для формирования первых объемных данных.
20. Способ по п.19, дополнительно содержащий этапы, на которых:
после этапа использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих первое излучение, изменяют поперечное смещение позиции и поперечное смещение детектора для изменения размера поперечного поля обзора;
испускают второе излучение, при этом второе излучение пересекает, по меньшей мере, участок поперечного поля обзора;
используют детектор излучения для сбора данных компьютерно-томографических проекций, характеризующих второе излучение;
повторяют этапы испускания второго излучения и использования детектора излучения для сбора данных компьютерно-томографических проекций, характеризующих второе излучение, под каждым из множества углов проекций для сбора второго множества СТ-данных;
реконструируют второе множество данных проекций для формирования вторых объемных данных.
21. Способ по п.20, в котором вторые данные проекций пересекают все поперечное поле обзора.
22. Способ по п.20, в котором этап изменения поперечного смещения содержит этап, заключающийся в том, что сдвигают источник и детектор в поперечном направлении (550), которое является тангенциальным относительно поперечного поля обзора.
23. Способ по п.22, в котором этап изменения поперечного смещения содержит этап, заключающийся в том, что сдвигают ось вращения в направлении (552), которое перпендикулярно поперечному полю обзора.
24. Способ по п.20, в котором этап изменения поперечного смещения содержит этап, заключающийся в том, что сдвигают источник и детектор в направлении (402), для которого минимальное расстояние между детектором и краем поперечного поля обзора остается постоянным.
25. Способ по п.19, содержащий этапы, на которых:
принимают ввод пользователя, который указывает требуемый размер поперечного поля обзора;
используют требуемый размер для определения требуемого положения детектора.
26. Способ по п.19, в котором детектор излучения является плоским детектором, этап испускания первого излучения содержит этап, заключающийся в том, что испускают пучок (212) излучения, имеющий, в общем, веерообразное поперечное сечение, при этом поперечное сечение содержит первый (250) и второй (252) крайние лучи и причем крайние лучи пересекают детектор под равными углами (240, 242) падения.
27. Способ по п.19, в котором этап испускания первого излучения содержит этап, заключающийся в том, что испускают пучок излучения, имеющий, в общем, веерообразное поперечное сечение, при этом поперечное сечение содержит центральный луч (216), причем, центральный луч поперечно смещен от центра поперечного поля обзора и центральный луч пересекает детектор под углом, который перпендикулярен детектору.
28. Способ по п.27, в котором центральный луч пересекает поперечный центр детектора.
29. Способ по п.19, содержащий этап, заключающийся в том, что поворачивают позицию и детектор излучения вокруг оси вращения, при этом ось вращения является центром поперечного поля обзора.
30. Способ по п.19, содержащий этап, заключающийся в том, что используют двумерную антирассеивающую решетку для ослабления рассеянного излучения, принимаемого детектором.
31. Способ по п.19, содержащий этап, заключающийся в том, что собирают данные томографических проекций по спиральной или осевой траектории сканирования.
32. Компьютерное томографическое устройство, содержащее:
рентгеновский источник (202), при этом рентгеновский источник поперечно смещен от оси (214) вращения и поворачивается относительно нее;
рентгеновский детектор (204, 704), при этом рентгеновский детектор регистрирует излучение, испускаемое рентгеновским источником, причем рентгеновский детектор поперечно смещен от оси вращения и поворачивается относительно оси вращения в состоянии постоянной механической связи с рентгеновским источником для сбора данных проекций под множеством углов проекций, причем рентгеновский источник испускает излучение (212), характеризующееся поперечным углом веерного пучка, и причем полное взятие угловых отсчетов поперечного поля (218) обзора требует сбора данных проекций в большем угловом диапазоне, чем 180° плюс угол веерного пучка, направление поперечного смещения является тангенциальным относительно поперечного поля обзора;
блок (806) реконструкции, который реконструирует данные проекций для формирования объемных данных, характеризующих поперечное поле обзора.
33. Устройство по п.32, в котором устройство содержит поворотный гентри (816) и при этом рентгеновский источник и рентгеновский детектор установлены с возможностью перемещения относительно поворотного гентри.
34. Устройство по п.32, в котором полное взятие угловых отсчетов поперечного поля обзора требует сбора данных проекций в угловом диапазоне приблизительно 360°.
35. Устройство по п.32, в котором центральный луч (216) излучения, испускаемого рентгеновским источником, смещен от оси вращения и пересекает поперечный центр (219, 719) рентгеновского детектора.
36. Устройство по п.35, в котором детектор излучения является плоским и при этом центральный луч перпендикулярен плоскости детектора излучения.
37. Устройство по п.32, содержащее антирассеивающую решетку (290), расположенную между детектором и областью исследования, и при этом антирассеивающая решетка симметрична относительно поперечного центра детектора.
38. Устройство по п.32, содержащее средство для изменения поперечного смещения рентгеновского детектора для изменения размера поперечного поля обзора.
39. Устройство по п.32, содержащее средство для сбора данных по одной из кольцевой, круговой и линейной, спиральной или седловидной траекторий.
| DE 102005004502 A1, 10.08.2006 | |||
| WO 2005009206 A2, 03.02.2005 | |||
| US 2004077088 A1, 22.04.2004 | |||
| RU 2001135390 A, 27.03.2004 | |||
| КАЛЕНДЕР В | |||
| Компьютерная томография | |||
| - М.: ТЕХНОСФЕРА, 2006 | |||
| ВИНОГРАДОВ Е.В | |||
| и др | |||
| Микродозовая флюорография | |||
| Современная рентгенография | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Найдено в Интернете www.fluro.ukrbiz.net. | |||

