(54) ОПТИМИЗАТОР
третьи входы - с выходами соответствующих регистров, а первые выходы счетчиков соединены с вторыми входами соответствующих преобразователей код-аналог, вторые выходы - с вторыми входами соответствующих регистров 2 .
Недостатками данного устройства являются:
1.Реализованный в устройстве способ оптимизации основанный на измерении функции качества (ФК) в области изменения оптимизируемых параметров, ранжировании измеренных значений в порядке возрастания Q, Q,. .., сканировании некоторой области изменения оптимизируемых параметров с большей плотностью перебора вокруг значений ФК Q, получении ряда новых значений Q /Q j fJи повторении процесса оптимизации вокруг нового экстремального значения позволяет определить глобальный экстремум, если зависимбсть ФК от оптимизируемых параметров является унимодальной. Если зависимость ФК
от оптимизируемых параметров не является унимодальной, то известное устройство позволяет определить толко локальный экстремум.
2.Данный оптимизатор позволяет определить рптимальныезначения оптимизируемых параметров только тогда, когда объект характеризуется одной ФК.
3.Известное устройство непригодно для оптимизации объектов, когда его ФК имеет вид годен-негоден или да-нет, т.е. когда значение ФК нельзя выразить в -цифровой форме
4.Сканирование с помощью этого многоканального оптимизатора в просранстве допустимых изменений параметров на каждом цикле осуществляется матричным способом. При этом имеет место перебор лишних состояний,
в которых в-процессе оптимизации заведомо можно сказать, что ФК меньше допустимой величины. При использовании матричного способа сканирования возрастает трудоемкость и время определения глобального экстремума ФК.
Цель изобретения - расширение -функциональных возможностей и повышение быстродействия процесса оптимизации.
Цель достигается тем, что оптимизатор, содержсцций п-реверсивных счетчиков, выходы которых через соответствующие преобразователи коданалог соединены с соответствующими входами объекта оптимизации, блок управления,, генератор тактовых импульсов блок измерения функции качества, первый вход которого соединен с первым выходов объекта оптимизации, а второй - с первым выходом блока управления, второй
выход которого соединен с вторыми входами преобразователей кол-аналог, третий выход - с первыми входами реверсивных счетчиков, четвертый выход - с управляющим входом генератора тактовых импульсов, а первый вход - с выходом блока измерения функции качества, введены элемент ИЛИ, блок варьирования оптимизируемых параметров, дополнительные блоки измерения функции качества и блок памяти, при этом выходы блока варьирования оптимизируемых параметров, к соответствующим входам которого подключены выходы генератора импульсов и элемента ИЛИ, соединены с вторыми входами соответствующих реверсивных счетчиков, выходы дополнительных блоков измерений функций качества подключены к соответствующим вторым входам блока управления и элемента ИЛИ, а их входы соединены соответствующими вторыми выходами объекта оптимизации и блока управления, к входам блока памяти подключены соответствующие выходы реверсивных счетчиков и блока управления, а его выход соединения с третьим входом блока управления.
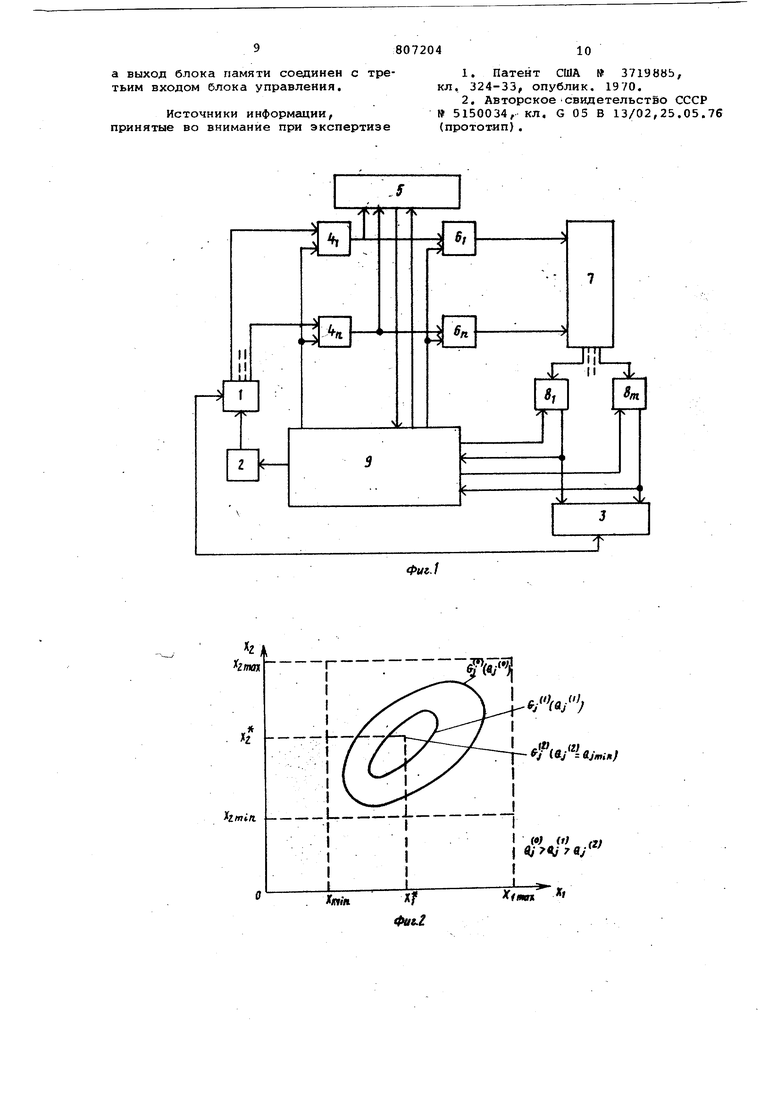
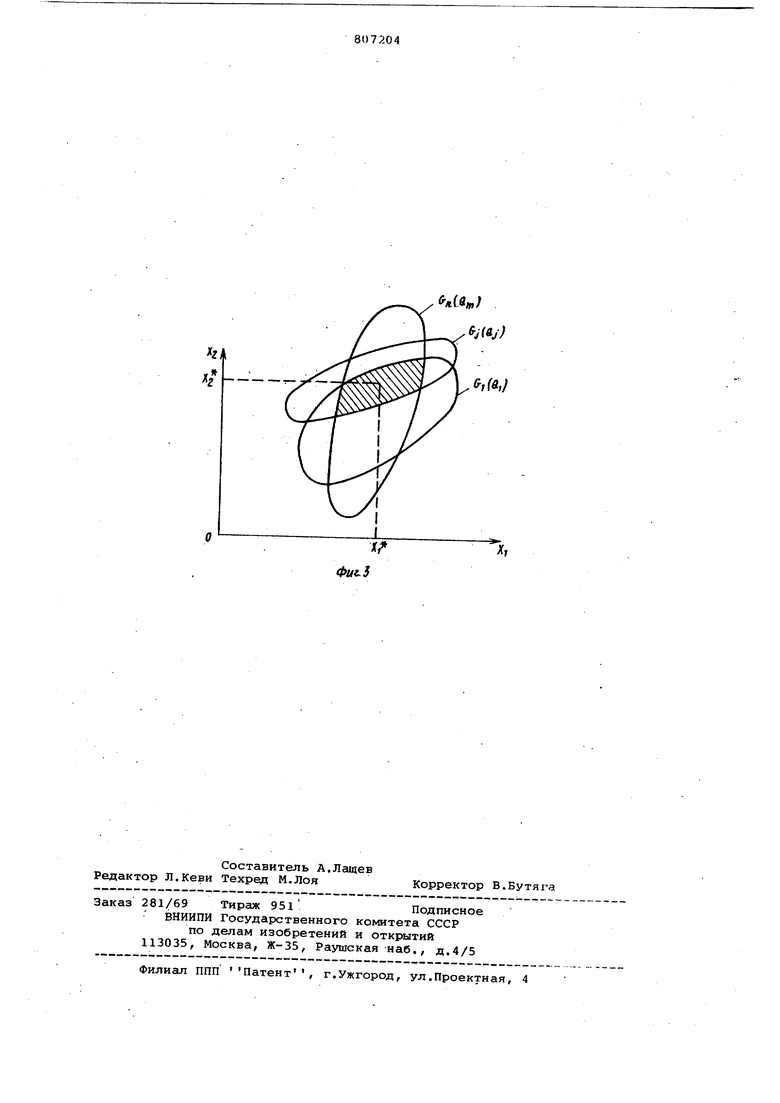
На фиг.1 приведена блок-схема предлагаемого оптимизатора; на фиг.2график, поясняющий процесс поиска экстремума функции и качества, значения которой можно выразить в численной форме, в двухмерном пространстве оптимизируемых параметров; на фиг.З - график, поясняющий процесс оптимизации на максимум запаса работоспособности объекта, характеризуемого т-ФК, в том числе и ФК вида да-нет, или одной ФК вида данет ,
Оптимизатор (фиг.1) содержит блок 1 варьирования параметров оптимизации к соответствующим входам которого подключены вЦходы генератора 2 импульсов и элемента ИЛИ 3, а его выходы подключены к первым входам и соответствующих реверсивных счетчиков 4.Выходы счетчиков 4 подключены к соответствующим входам блока 5 памяти и первым входам соответствующих преобразователей код-аналог 6. Выходы преобразователей 6 подключены к соответствующим входам объекта 7 оптимизации, выходы которого соединены с m блоками 8 измерений функций качества. Выходы блоков 8 измерений функций качества подключены к соответствующим входам элемента ИЛИ 3 и блока 9 управления, а соответствующие выходы блока 9 управления пбдключеМы к вторым входам блоков 8 измерений функций качества к входу генератора 2 импульсов и к вторым входам реверсивных счетчиков 4, преобразователей б и (п+1)-му входу блока 5 памяти. Выход блока 5 памяти соединен с соответствующим входом блока 9 управления. Приняты следующие обозначения: Х - текущее значение i-ro (i. 1,2) оптимизируемого параметра; соответственно максимальное и минимальное эна-г чения j-ой ФК; М Qj(,l,2,..) г-ое значение j-ой ФК; оптимальные значения параметров; G(rbO,l,2,..) г-ая область par б о тоспос об нос ти, под которой понимается множество значений оптимизи руемых параметров при которых j-ая ФК не больше (не меньше) заданного - значения , т.е. (х, ,Xjg) 6С7 ( (.X. «х)ес); Р - область допустимы значений оптимиэи руе мых п ар аме тро в определяемых нера венствами х rnin min / 1Де -i min. г ч mox ( 1,2) - соответст венно минимальное и максимальное до допустимые значения i-ro оптимизи руемого параметра Gf - область оптимальности по П рето, под которой понимается множес во значений оптимизируемых параметров, при которых все ФК не болыйе (не меньше) згщанных (фиг,2 и 3). Блок варьирования параметров оптимизации предназначен для дискретного или плавного изменения оптимизируемых параметров в зависимости 6т реализованного в оптимизаторе метода определения границы области работоспособности. Если, например, реализован метод контурного обхода, то по команде с блока управления блок варьирования зафиксирует (п-2) оптимизируемых параметра и изменит дискретно в соответствии с методом контурного обхода значения остальных двух оптимизируемых параметров. Поисковая оптимизация в предлагаемом оптимизаторе заключается в следующем. Предположим, что объект оптимизации характеризуется одной ФК Q, значение которой можно выразить в цифровой форме. Требуется определить экстремум (например, минимум) дан;ной функции. Тогда вначале, задают (произвольное значение не менее максимального, т.е. ,x де Q максимальное значение фК,. Затем определяют область работоспособности в пространстве оптимизируемых параметров С°, в которой выполняется заданная ФК , путем определения только граничных точек области G® , Метод определения граничных точек определяется видом оптимизируемой ФК. Если для экспериментального вычисления ФК требуется определенное время (например, если в качестве ФК ис пользуется такой показатель как точность поддержания длительности прямоугольного сигнала), то целесообразно дискретное изменение оптимизируемых параметров. При этом после каждого дискретного изменения на определенный шаг оптимизируемых параметров определяется численное значение ФК. Если возможно непрерывно следить за изменением ФК при плавном изменении оптимизируемых параметров, то целесообразно использовать непрерывное изменение оптимизируемых параметров .у Если область G° не пустая, то изменяют значение ФК на величинуДО, Q W-AQ. Значение iQ может быть постоянным иЛи переменным на каждом шаге оптимизации. Для нового значения ФК Q определяют соответствующую область работоспособности G . Затем процесс оптимизации циклически повторяют. Момент прекращения процесса оптимизации определяется при таких значениях оптимизируемых параметров х (xj,x ... х ,...х7), когда ФК на г шаге отличается от значения ФК на (r-l)-oM шаге на величину о f- О f т.е. д(гм1 (x)-Qfr) ()iS , (,2). , Величина § задается заранее,Если , то в г-ом цикле оптимизации об- . ласть G стянется в точк,У. Значения оптимизируемых параметров в этой-точке определяют оптимальное (минимальное) значение ФК , ,которое реализует оптимизируемый объект. Если объект характеризуется m ФК, в том чйсЛе ФК типа да-нет, или одной ФК типа да-нет, то процесс оптимизации производитс-я в три этапа. На первом этапе определяется область GI (,m) . в которой выполняется ФК Qi. На втором этапе определяется область оптимальности по Парето или области компромиссов. На третьем этапе выбирается точка, удаленн-ая на одинаковое расстояние от граничных точек области оптимальности по Парето, В случае когда ФК имеет вид данет, выбирается точка, удапей«ая на одинаковое расстояние от.г()аничных точек области, в которой выпол- , няется данная ФК. Оптимизатор работает следующим образом. Пусть .объект 7 одтими ации характ ризуется одной ФК Q3(,m) и требуется определить такие значения оптимизируемых параметров, которые обеспечивали бы, например, минимальное значение . Первоначально сигналами блока 9 управления устанавливгиотся начальные и конечные состояния реверсивных счетчиков 4, диапазон иэменейия которых через преобразователь б коданалог охватывает всю область возмож ных изменений оптимизируемых парамет ров Р, в j-ый блок 8 измерения функции качества, блока 9 управления записывает исходное значение 1)ой. ФК не менее максимального, т.е. Q Qdwax Затем блок 9 управления запускает генератор 2 импульсов, сигналы которого через блок 1 варьирования параметров оптимизации подаются на входы счетчиков 4 которые изменяют, свое состояние. Соответственно меняется и состояние объекта 7 оптимизации. В каждом новом состоянии объекта 7 в j-ом блоке 8 иэмере,ния функции качества производится измерение и сравнение текущего значения ФК QJ с заданным Qj. В зависимости от знака разности () блок 1 варьирования изменяет состояние счетчиков 4, определяя область работоспособности в которой выполняется соотношение Qj-c Q . После окончания процесса определения границы области Q:, блок 9 управления записывает в j-ый блок 8 новое заданное значение ФК с Qy. Затем блок 1 варьирования изменяет состояния счетчиков 4, определяя об ласть QS, в которой выполняется уело вие и т.д. Процесс оптимизации продолжается до тех пор, пока облас (, 2 , . .) не стянется в точку. В счетчиках 4. запоминаются оптимальны значения параметров х, обеспечиваю щих минимальное значение ФК ,, Если объект 7 характеризуется m ФК, то лок 9 управления, в блоки 8 вычисления записывает требуемые значения ФК (j l,iti) . Затем блок 1 варьирования, изменяя состоя ния счетчиков 4, определяет гранич ные значения области G;, в которой выполняется условие Qj QvjotA осто яния счетчиков 4, соответствукнцие граничным значениям оптимизируе(«ых параметров, записываются в блок 5 памяти.Подобная процедура определения граничных точек и их запоминани в блоке 5 памяти повторяется m раз. Затем блок 5 памяти определяет область оптимальности по Парето,в которой выполняются все m ФК. Блок 9 управления определяет в области Пар то точку, находящуюся на одинаковых pJlccтoянияx от границы области опти мальности по Парето. Значение настраиваегллх параметров в этой точке определяют состояние объекта 7 с максимальным запасом работоспособности в пространстве оптимизируемых параметров. В результате применения предлагаемого оптимизатора: 1.Расширяются функциональные возможности за счет использования его для выбора оптимизируемых .параметров объекта, характеризуемого ФК вида да-нет, годен-негоден или ), ФК, и за счет определения глобальнбго экстремума ФК, значение которой выражается в числовой формуле. 2.Повышается быстродействие процесса оптимизации за счет исключения перебора всех состояний объекта оптимизации путем определения только граничных значений области, в которой, выполняется заданная ФК. Формула изобретения Оптимизатор, содержащий п-реверсивных счетчиков, выходы которых через соответствующие преобразователи код-аналог соединены с соответствующими входами объекта оптимизации, блок управления, генератор тактовых импульсов, блок измерения функции качества, первый вход которого соединен с первым выходом объекта оптимизации, а второй вход - с первым выходом блока управления, второй выход которого соединен с вторыми входами преобразователей код-аналог, третий выход - с первыми входами реверсивных счетчиков, четвертый выход - с управляющим входом генератора тактовых импульсов,а первый вход - с выходом блока измерения функции качества, отличающийся тем, что, с целью расширения функциональных возможностей и повышения быстродействия оптимизатора, в него введены блок варьирования оптимизируеЧиих параметров, дополнительные блоки измерения функций качества, элемент ИЛИ И блок памяти, при этом выходы блока варьирования оптимизируемых параметров, к соответствующим входам которого подключены выходы генератора импульсов и элемента ИЛИ, подсоединены к вторым входам соответствующих реверсивных счетчиков, выходы дополнительных блоков измерений функций качества подключены к соответствующим вторым входам блока управления и входам элемента ИЛИ,а их входы соединены с соответствующими вторыми выходами объекта оптимизации и блока управления, к входам блока памяти подключены соответствующие выходы реверсивных счетчиков и блока управ,г1ения.
а выход блока памяти соединен с третьим входом блока управления.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 37198ВЬ, кл, 324-33, опублик. 1970.
2.Авторское свидетельство СССР
5150034, кл. G 05 В 13/02,25.05.76 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный автоматический оптимизатор | 1980 |
|
SU949634A1 |
| Многоканальный автоматический оптимизатор | 1985 |
|
SU1269095A1 |
| Оптимизатор | 1981 |
|
SU983650A1 |
| Многоканальный оптимизатор | 1973 |
|
SU515084A1 |
| МНОГОКАНАЛЬНЫЙ СТАТИСТИЧЕСКИЙ ОПТИМИЗАТОР | 1972 |
|
SU326550A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| Оптимизатор | 1974 |
|
SU514270A1 |
| Двухканальный шаговый оптимизатор | 1985 |
|
SU1343391A1 |
| Многоканальный статистический оптимизатор | 1982 |
|
SU1076872A1 |
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
7
V
-
I W W ,У1 79j7Qj
I Xi
