со
00 О1
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ ВОЗДУШНОЙ СКОРОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2579550C1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГАЦИОННОЙ ПАНОРАМЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2012 |
|
RU2528177C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ | 2014 |
|
RU2579551C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС САМОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570339C1 |
| Система управления | 1991 |
|
SU1792539A3 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 2002 |
|
RU2233480C1 |
| Способ автоматического определения рельефа | 1973 |
|
SU462077A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАСТЕРИЗАЦИИ ОБЪЕКТОВ | 2014 |
|
RU2586025C2 |
| Самонастраивающаяся система управления | 1981 |
|
SU1008698A1 |
Изобретение относится к автоматическим системам обработки результатов натурных испытаний динамических объектов. Цель изобретения - расширение функциональных возможностей и области применения системы. Это достигается тем, что в систему идентификации введены блок памяти, блок задания уставок, блок вычисления функционала,, блоки вычисления частных производных, количество которых равно числу идентифицируемых параметров, оптимизатор, блок-контроля сходимости, блок команд, элемент ИЛИ и управляемый ключ. Кроме того, между каждым выходом блока настройки параметров и параметрическим входом, номер которого совпадает с номером данной вспомогательной модели, каждой из вспомогательных моделей введены сумматоры отклонений, а также установлены соответствующие связи между этими блоками. Предлага-- емая система позволяет осуществлять идентификацию параметров многомерных нелинейных объектов по записанным на отрезке наблюдения в блок памяти измерениям входных и выходных сигналов объекта. 8 ил. о (Л е
го
rsD
Изобретение относится к автоматическим системам обработки результато натурных испытаний динамических объектов и может быть использовано для идентификации параметров многомерных нелинейных динамических объектов по результатам испытаний,
Це.пь изобретения - расширение функциональных возможностей и облас- ти применения системы.
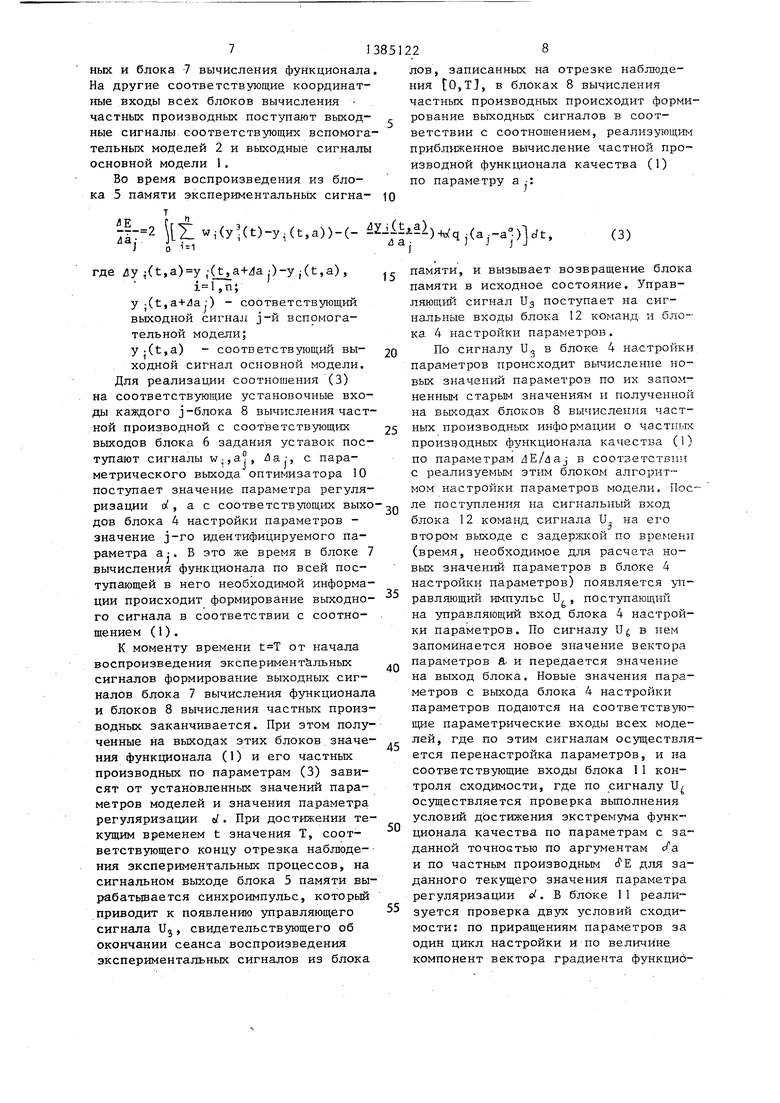
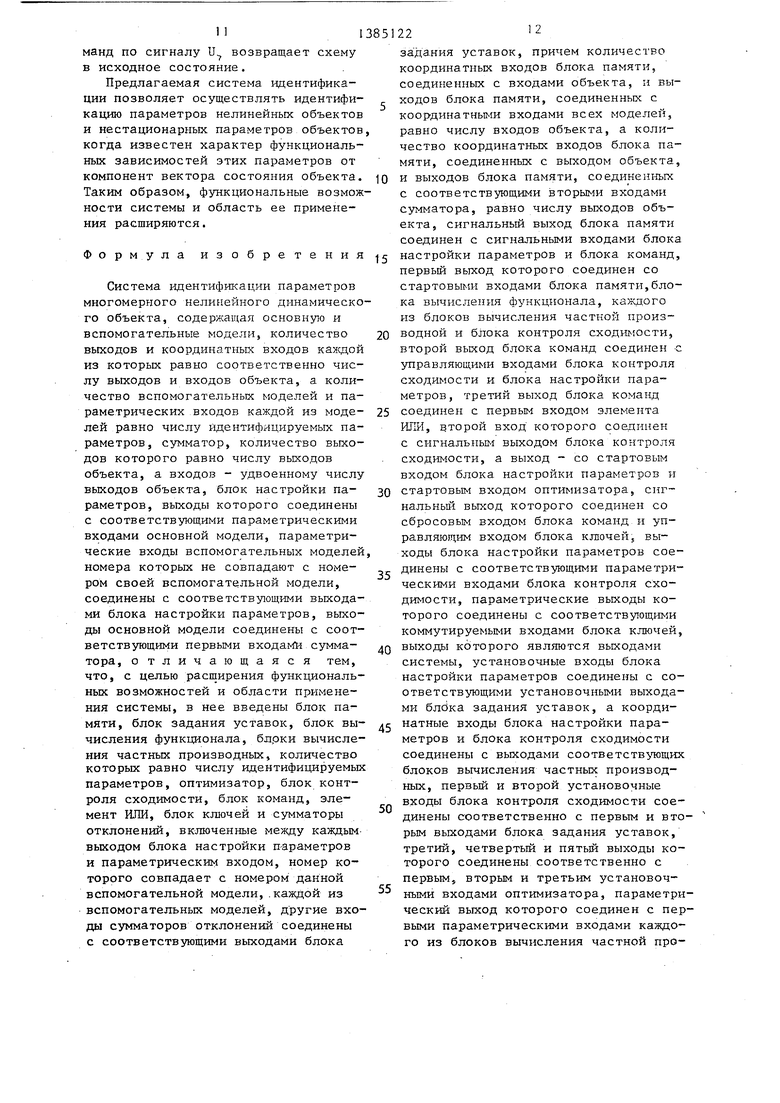
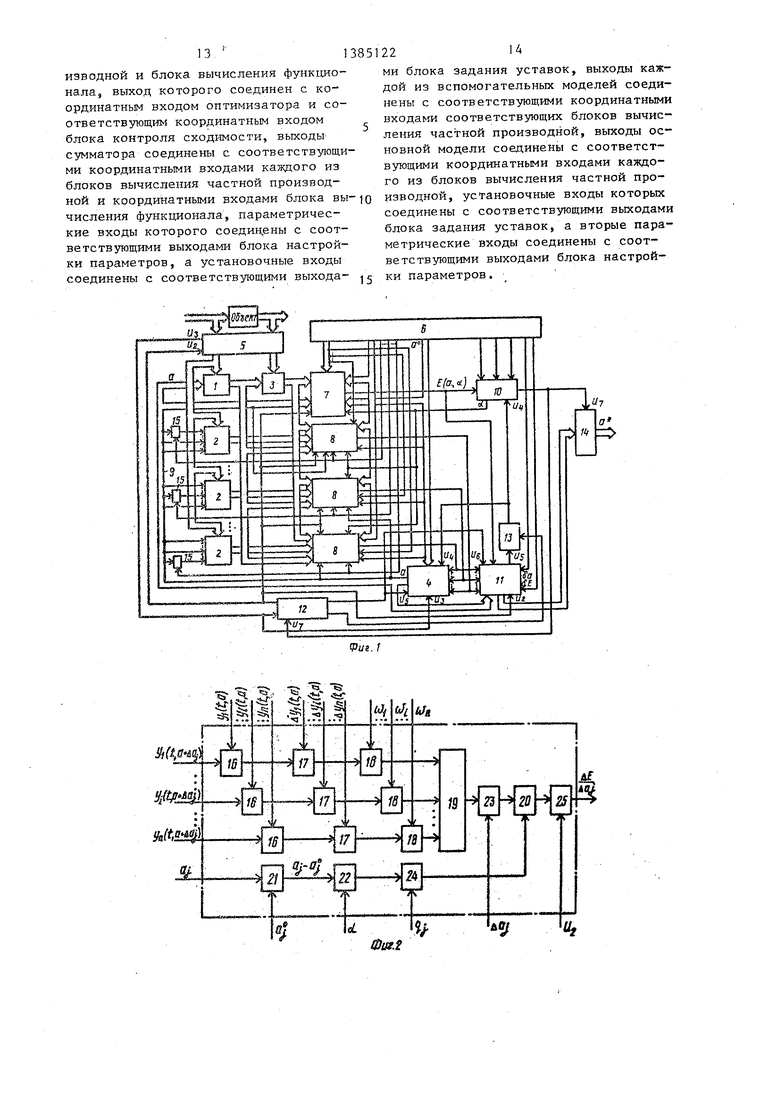
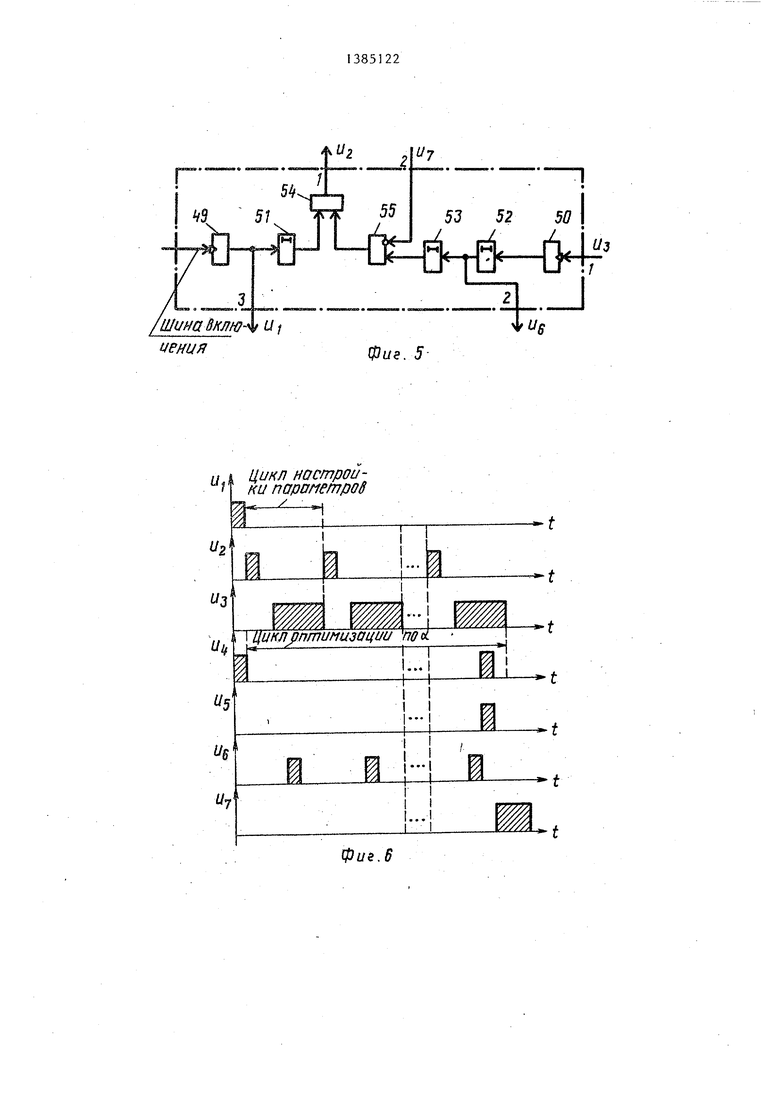
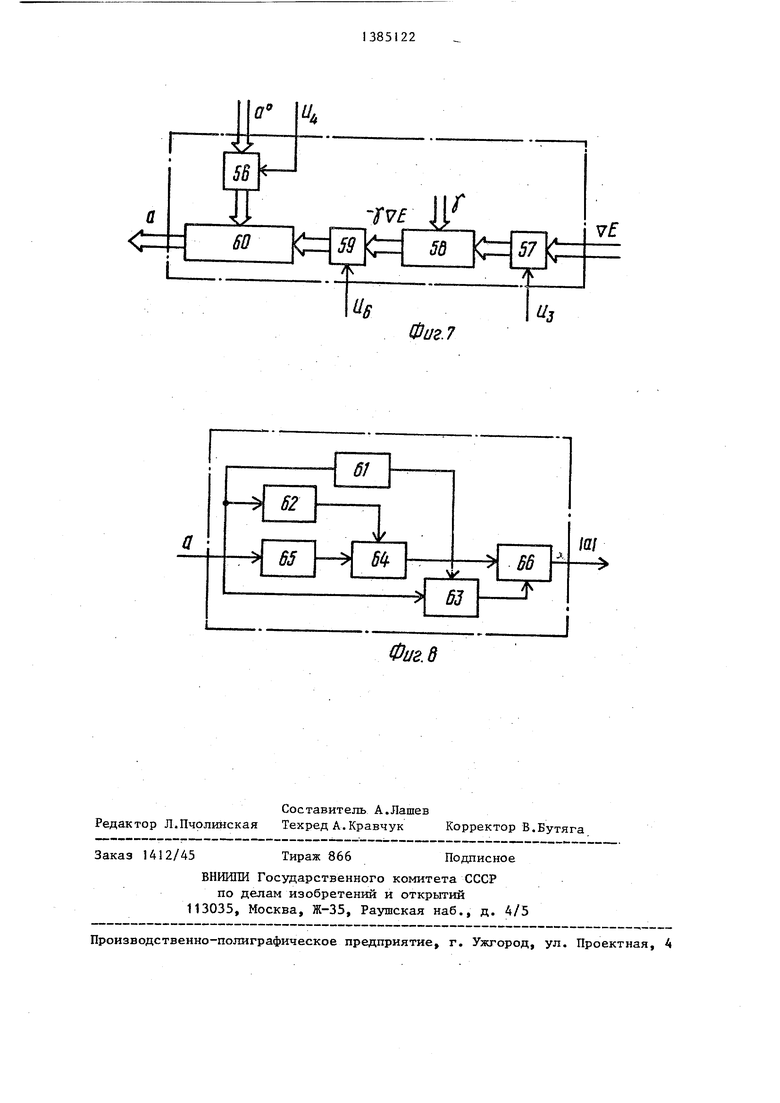
На фиг,1 представлена функциональная схема системы идентификации параметров многомерного нелинейного динамического объекта; на фиг.2 - функциональная схема блока вычисления частной производной; на фиг.З - функциональная схема блока вычисления функционала; на фиг.4 - функциональная схема блока контроля сходи- мости; на, фиг.З - функциональная схема блока команд; на фиг,6 - временная диаграмма работы системы иденти- фшсации; на фиг.7 - функциональная схема возможного исполнения блока настройки параметров; на фиг.8 - функциональная схема возможного исполнения блока вьщеления модуля.
Система идентификации содержит основную 1 и вспомогательные 2 моде- ли, сумматор 3, блок 4 настройки параметров, блок 5 памяти, блок 6 задания уставок, блок 7 вычисления функционала, блоки 8 вычисления частных
производных, число которых равно ЧИС
лу идентифицируемых параметров 9, оптимизатор 10, блок 1 контроля сходимости, блок 12 команд, элемент ИЛИ 13, блок 14 ключей и сумматоры 5 отклонения. На схеме использованы следующие обозначения: x(t), y Ct) и выходной сигналы объекта; y(t,a) ,y(t, j) - вьпсодной сигнал основной и j-й вспомогательной модели; /5y(t,a) - разность выходных сигналов основной модели и объекта; а, а текущее и начальное значения вектора параметров объекта; мч соответственно минимальное максимальное и текущее значения пара метра регуляризации; Е(а,о) - значение функционала качества; q - весовой коэффициент J-го параметра; w- - весовой коэффициент i-й компоненты вектора состояния объекта; ла - век- тор отклонений параметров объекта; , сГЕ, Ja - требуемые точности оп- тимизации соответственно по параметру регуляризации, функционалу качества и идентифицируемым параметрам; - приближенное значение производной функцио нала по j-му параметру; Ui, i I,7 - управляющие сигналы; а - искомый вектор идентифицированных параметров.
Блок 8 вычисления частной производной системы идентификации содержит координатные сумматоры 16, координатные блоки 17 умножения и координатные настраиваемые усилители 18, количество каждых из которых равно числу выходов объекта, выходной сумматор 19, первый 20 и второй 21 сумматоры, блок 22 умножения, первьй 23 и второй 24 настраиваемые усилители и инетгратор 25.
Блок 7 вычисления функционала образуют координатные квадраторы 26 и координатные настраиваемые усилители 27, количество каждых из которых равно числу выходов объекта, а также параметрические сумматоры 28, параметрические квадраторы 29 и параметрические настраиваемые усилители 30, количество которых равно числу идентифицируемых параметров, а также первый выходной .сумматор 31, число входов которого равно числу идентифицируемых параметров, блок 32 умножения, второй выходной сумматор 33, число входов которого на единицу больше числа выходов объекта,/и интегратор 34, выход которого является выходом блока вычисления функционала
Блок 11 контроля сходимости содержит управляемый ключ 35 параметров, блок 36 запоминания параметров, настраиваемые усилители 37, блоки 38 вьщеления модулей параметров, сумматоры 39 параметров, блоки 40 выделения модулей разностей, компараторы 41 параметров, блоки 42 умножения, блоки 43 вьщеления модулей произведений и компараторы 44 градиента, количество которых равно числу идентифицируемых параметров, а также первый настраиваемый усилитель 45, блок 46 вьщеления модуля функционала, элемент 47 задержки и элемент И 48, число входов которого на единицу больше удвоенного числа идентифицируемых параметров, а выход которого является выходом блока контроля сходимости.
Блок 12 команд имеет два одновиб- ратора 49 и 50, три элемента 51-53 задержки, схему ИЛИ 54 и схему И 55.
Блок 4 настройки параметров состоит из последовательно соединенных первого 56 и второго 57 управляемых ключей, блока 58 настраиваемых уси- лителей, третьего з равляемого ключа 59 и выходного блока 60 памяти.
Блок вьщеления модуля содержит первое 61 и второе 62 пороговые устройства, первый 63 и второй 64 уп- равляемые ключи, инвертор 65 и сумматор 66.
Е(у%У,а) (y (t)-y(t,a)) w(yMt)-y(t,a))Jt + ( q(a-a° )d t
иди в скалярной форме:
I .f
Е(у%у,а) J L w,(y(t)-yi(t,a)) dt+ с/ Ц q (a.-a;)dt,
о
где y4t) (y(t),y|(t),...,y,(t))- вектор состояния объекта (измеряемый экспериментальный выходной сигнал - объекта);
y(t,a) (,a),yj(t,a), .. ., У,(С,а)) вектор состояния модели;
п - число выходов объекта иденти фйкации (размерность вектора состояния объекта и модели);
а(а,,а2,.. .,а J - вектор параметров объекта;
. m - число идентифицируемых пара- метров (размерность вектора параметров);
- матрица весовых коэффициентов компо-
W 0... -О О w.-.O
О 0... W,
нент вектора состояния объекта;
q, О ...О - матрица весо- q О q...O ; вых коэффици ентов компо0 О ...q нент вектора
параметров объекта;d - параметр регуляризации; а° (а°, aj,...,a) - начальное приближение вектора параметров объекта.
Объект идентификаи;ии описьюается системой обыкновенных нелинейных дифференциальных уравнений вида:
у f(у, X, а)
(2)
Предлагаемая система идентификации реализует способ идентификации параметров объекта с помощью настраиваемой модели, основанный на использовании информации о первых частных производных функционала качества по настраиваемым параметрам. В качестве функционала качества в предлагаемой системе используется равномерно выпуклый функционал вида:
(1)
где X (х ,Х2,. . . ,х) - вектор входных координат объекта (k - число входов объекта, т.е. размерность вектора входных координат); f (f .,,,,.. .,f,) - вектор- функция, непрерывно дифференцируемая по всем СВО1Ш аргументам на отрезке наблюдения Го, Т экспериментальньк процессов .
В этом случае задача идентификации параметров объекта формулируется следующим образом.
Элемента а е V (где V - множество допустимых значений вектора параметров) такой, что
min Е (у%у,а)Е (,а) aeV
и y(t,a) удовлетворяет уравнению (2) при x(t)EX(t) где x(t) - экспе- риментальньш входной сигнал объекта,, у(о)у(о). При этом а рассматривается как искомьш вектор параметров. Необходимо добиться также, чтобы значение Е(у,у,а) было минимумом функционала качества не только по пapaмeтpa а , но и по параметру регуляризации с/ .
В качестве алгоритма настройки параметров модели может быть использован любой градиентньп метод минимизации функции многих переменных. Ис- пользуемьй в системе оптимизатор 10 реализует а лгоритм одномерной оптргми51
зации функционала (1) по параметру регуляризации о . Это может быть любой алгоритм одномерной оптимизации, но в данном случае с целью сокращения затрат времени на процесс идентификации целесообразно использовать алгоритмы, требующие для достижения заданной точности оптимизации минимальное число вычислений оптимизируемой функции (например, метод Фибоначчи).
Система идентификации работает следующим образом.
Перед включением системы в работу осуществляется запись экспериментальных входных.х(t) и выходных y (t) сигналов на отрезке наблюдения tO,T в блок 5 памяти, в блоке б задания уставок выставляются верные коэффициенты W .( ,п) ,q g( ,т) , началь- ные приближения параметров a(j l,in),
MajTbie приращения параметров ла -(j ) для приближенного вычисления частных производных функционала качества по параметрам, требуемая точность вычисления экстремума функционала по параметрам сС а и по градиенту cfE, максимальное и мини-; мальное допустимые значения параметра регуляризагщи d и требуемая точность определения экстремума функционала, по параметру регуляризации М,.
Управление работой всей схемы осуществляется з правляющими сигналами, поступающими от блока 12 команд. Временная диаграмма формирования управ- ляющих сигналов в схеме представлена на фиг.6.
При включении системы в работу на третьем выходе блока 12 команд формируется кратковременный утгравлягощий импульс Uis который поступает на вход элемента ИЛИ 13, на выходе которого появляется управляющий сигнал U, по- стзшающий на стартовые входы оптимизатора 10 и блока 4 настройки параметров. По этому сигналу оптимизатор запускается, что приводит к появлению на его параметрическом выходе первого начального значения параметра регуляризации (, поступающего на соотве.тствующие входы блока вычисления 7 функционала и блоков 8 вычисления частных производных. По сигналу Uy в блоке 4 настройки параметров осуществляется запоминание начального
0
226
значения вектора параметров а
20
25
30
35
Q
0
5
/ о (л.
а.
„)
2 ,.,, И выдача этого значения вектора параметров на выход блока. Это значение поступает на соответствующие параметрические входы всех моделей 1 и 2, в результате чего во всех моделях устанавливаются начальные значения параметров a1(j 1 ,ni) . Причем в каждой j-й вспомогательной модели 2 значение параметра а- устанавливается с малым прй раще- нием 4 а j, поступающим на соответствующий сумматор 15 отклонений. После выставки заданных значений параметров во всек моделях системы на первом выходе блока 12 команд появляется кратковременный управляющий сигнал U7, поступающий на стартовые входы блока 7 вычисления функционала, всех блоков 8 вычисления частных производных, блока 11 контроля сходимости и блока 5 памяти. По сигналу Uj в блоке 7 вычисления функционала и всех блоках 8 вычисления частных производных происходит обнуления интеграторов, а в блоке контроля 11 сходимости происходит запоминание текущего значения вектора параметров. Блоком 5 памяти по сигналу U j начинается воспроизведение записанных в него экспериментальных входных и выходных сигналов объекта в принятом масщтабе времени. Воспроизведение экспериментального входного сигнала начинается с синхроимпульса, по которому происходит обнуление всех интеграторов всех моделей, после чего в принятом масщтабе времени в моделях осуществляется интегрирование дифференциальных уравнений объекта и на выходах моделей появляются процессы, моделирующие поведение объекта. При этом выходной сигнал каждой модели зависит от установленных в ней значений параметров. Так выходной сигнал каждой j-й вспомогательной модели 2 y(t,a+/3ap имеет вариацию, вызванную малым приращением ла- параметра а ;. Выходные экспериментальные сигналы y(t) (,ii) поступают на соответствующие входы сумматора 3, на другие входы которого поступают выходные сигналы основной модели 1 у -(t-,а). На выходе сумматора 3 формируется векторньш сигнал ошибки (t)-y(t,a), который подается на соответствующие входы всех блоков 8 вычисления частных производ71385
ных и блока 7 вычисления функционала. На другие соответствующие координатные входы всех блоков вычисления частных производных поступают выходные сигналы соответствующих вспомогательных моделей 2 и выходные сигналы основной модели 1,
Во время воспроизведения из бло- 5 памяти экспериментальнь1х сигна- т
ка
10
228
лов, записанных на отрезке на ния tO,Tj, в блоках 8 вычисле частных производных происходи рование выходных сигналов в с ветствии с соотношением, реал приближенное вычисление частн изводной функционала качества по параметру а :
St| w,(y(t)-y,(t.a))-(- ))н .(,.,p-j,,, (3)
где лу (t,a)y ,-( |)-у j(t,a),
,n;
y.(t,a+i3a;) - соответствующий выходной сигнал j-й вспомогательной модели;
y.(t,a) - соответствующий выходной сигнал основной модели, Для реализации соотношения (3) на соответствующие установочные входы каждого j-блока 8 вычисления частной производной с соответствующих выходов блока 6 задания уставок посйа,
с паратупают сигналы w,aj, метрического выхода оптимизатора 10 поступает значение параметра регуляризации of , а с соответствующих выходов блока 4 настройки параметров - значение j-ro идентифицируемого параметра а;. В это же время в блоке 7 вычисления функционала по всей поступающей в него необходимой информации происходит формирование выходного сигнала в соответствии с соотношением (1) .
К моменту времени от начала воспроизведения экспериментальных сигналов формирова ше выходных сигналов блока 7 вычисления функционала и блоков 8 вычисления частных производных заканчивается. При этом полученные на выходах этих блоков значения функционала (1) и его частных производных по параметрам (3) зависят от установленных значений параметров моделей и значения параметра регуляризации е/, При достижении текущим временем t значения Т, соответствующего концу отрезка наблюдения экспериментальных процессов, на сигнальном выходе блока 5 памяти вы- р абатьшается синхроимпульс, который приводит к появлению управляющего сигнала Uj, свидетельствующего об окончании сеанса воспроизведения экспериментальных сигналов из блока
228
лов, записанных на отрезке наблюдения tO,Tj, в блоках 8 вычисления частных производных происходит формирование выходных сигналов в соответствии с соотношением, реализующим приближенное вычисление частной производной функционала качества (1) по параметру а :
5
0
5
0
5
0
5
0
5
памяти, и вызьшает возвращение блока памяти в исходное состояние. Управляющий сигнал из поступает на сигнальные входы блока 12 команд и блока 4 настройки параметров.
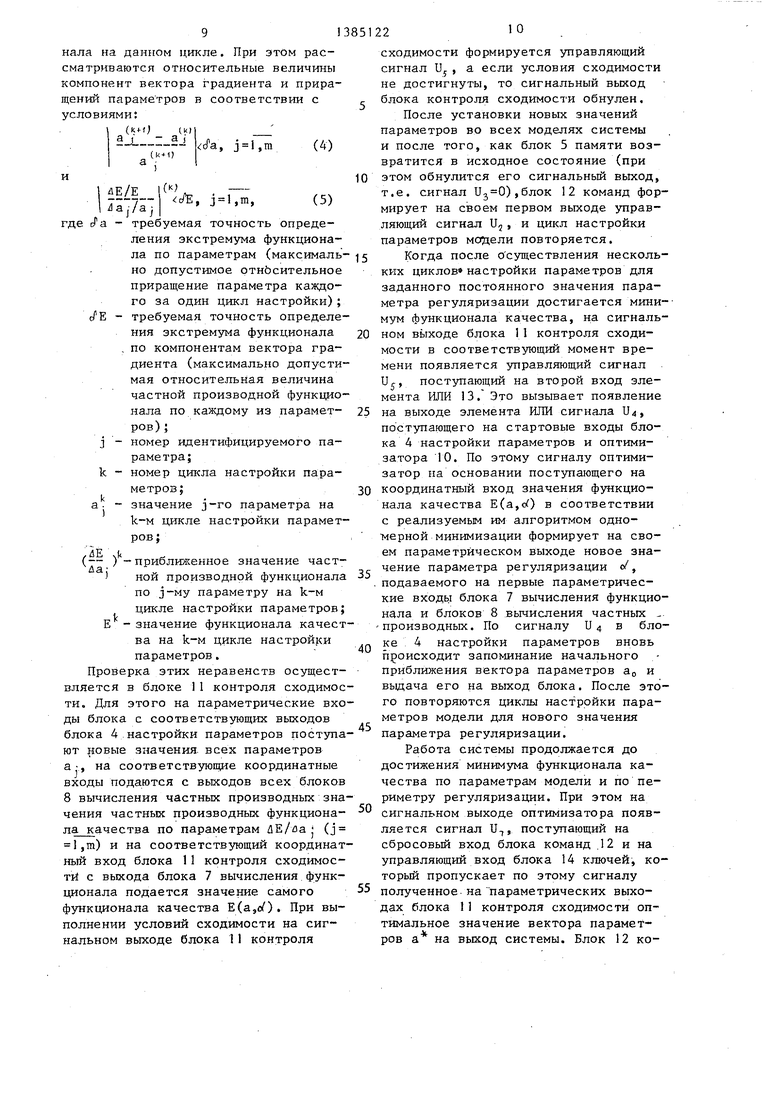
По сигналу и., в блоке 4 настройки параметров происходит вычисление новых значен1-ш параметров по их запомненным старым значениям и полученной на выходах блоков 8 вычисления частных производных информации о частпг,1х производных функционала качества (1) по параметрам ЛЕ/daj в соотзетствии с реализуемым этим блоком алгоритмом настройки параметров модели. После поступления на сигнальный вход блока 12 команд сигнала U на его втором выходе с задерж1сой по времени (время, необходимое для расчета новых значений параметров в блоке 4 настройки параметров) появляется yit- равляющий импульс U, пост шающт-ш на управляюп ий вход блока 4 настройки параметров. По сигналу U в нем запоминается новое значение вектора параметров fl. и передается значение на выход блока. Новые значения параметров с выхода блока 4 настройки параметров подаются на соответств то- щие параметрические входы всех моделей, где по этим сигналам осуществляется перенастройка параметров, и на соответствующие входы блока 11 контроля сходимости, где по сигналу U осзществляется проверка вьшолнения условий достижения экстремума функционала качества по параметрам с заданной точностью по аргументам (/а и по частньм производным для заданного текущего значения параметра регуляризации е. Б блоке 1 1 реализуется проверка двух условий сходимости: по приращениям параметров за один цикл настройки и по величине компонент вектора градиента функций9138
нала на данном цикле. При этом рассматриваются относительные величины компонент вектора градиента и приращений параметров в соответствии с условиями;
(Kttj (k)
а, ,m(4)
aj;3 2J
„ (k+O
-
Л:, j l,m,
10
(5)
t/E 20
25
ДЕ/Е
Jaj7aj
де - требуемая точность определения экстремума функционала по параметрам (максималь - 5 но допустимое отнЬсительное приращение параметра каждого за один цикл настройки); требуемая точность определения экстремума функционала по компонентам вектора градиента (максимально допустимая относительная величина частной производной функционала по каждому из параметров) ;
номер идентифицируемого параметра;
номер цикла настройки параметров;
значение j-ro параметра на k-M цикле настройки параметров;
-йЕл
(- )-приближенное значение част ной производной функционала 35 по j-му параметру на k-м цикле настройки параметров; Е - значение функционала качества на k-M цикле настройки параметров.
Проверка этих неравенств осущестляется в блоке 1 контроля сходимоси. Для этого на параметрические вхоы блока с соответствующих выходов лока 4 настройки параметров поступат новые значения, всех параметров
J k
а
30
40
45
а
J
на соответствзтащие координатные
входы подаются с выходов всех блоков 8 вычисления частных производных значения частных производных функциона- ла качества по параметрам ЛЕ/йа : (j l,m) и на соответствующий координатный вход блока 11 контроля сходимости с выхода блока 7 вычисления функционала подается значение самого функционала качества Е(а,о). При выполнении условий сходимости на сигнальном выходе блока 11 контроля
22
1 О
0
5
5
5
0
0 5
5
сходимости формируется управляющий сигнал Uj, а если условия сходимости не достигнуты, то сигнальный выход блока контроля сходимости обнулен.
После установки новых значений параметров во всех моделях системы и после того, как блок 5 памяти возвратится в исходное состояние (при этом обнулится его сигнальньй вьпсод, т.е. сигнал ),блок 12 команд формирует на своем первом выходе управляющий сигнал Uj, и цикл настройки параметров модели повторяется.
Когда после о существления нескольких циклов настройки параметров для заданного постоянного значения параметра регуляризации достигается минимум функционала качества, на сигнальном выходе блока 11 контроля сходимости в соответствующий момент времени появляется управляющий сигнал Uj, поступающий на второй вход элемента ИЛИ 13. Это вызывает появление на выходе элемента ИЛИ сигнала U, поступающего на стартовые входы блока 4 настройки параметров и оптимизатора 10. По этому сигналу оптимизатор на основании поступающего на координатный вход значения функционала качества Е(а,с) в соответствии с реализуемым им алгоритмом одномерной минимизации формирует на своем параметрическом выходе новое значение параметра регуляризации о/, . подаваемого на первые параметрические входы блока 7 вычисления функционала и блоков 8 вычисления частных - Производных. По сигналу И в блоке 4 настройки параметров вновь происходит запоминание начального приближения вектора параметров а и выдача его на выход блока. После этого повторяются циклы настройки параметров модели для нового значения параметра регуляризации.
Работа системы продолжается до достижения минимума функционала качества по параметрам модели и по периметру регуляризации. При этом на сигнальном выходе оптимизатора появляется сигнал U-,, поступающий на сбросовый вход блока команд .12 и на управляющий вход блока 14 ключей, ко- торьш пропускает по этому сигналу полученное на параметрических выходах блока 11 контроля сходимости оптимальное значение вектора параметров а на выход системы. Блок 12 команд по сигналу U возвращает схему в исходное состояние.
Предлагаемая система идентификации позволяет осуществлять идентификацию параметров нелинейных объектов и нестационарных параметров объектов когда известен характер функциональных зависимостей этих параметров от компонент вектора состояния объекта. Таким образом, функциональные возможности системы и область ее применения расширяются.
Формула изобретения
Система идентификации параметров многомерного нелинейного дмнамнческо го объекта, содержащая основную и вспомогательные модели, количество выходов и координатных входов каяэдой из которых равно соответственно числу выходов и входов объекта, а количество вспомогательных моделей и параметрических входов каждой из моде- лей равно числу ьщентифицируемых параметров, сумматор, количество выходов которого равно числу выходов объекта, а входов - удвоенному числу выходов объекта, блок настройки па- раметров, выходы которого соединены с соответствующими параметрическими входами основной модели, параметрические входы вспомогательных моделей номера которых не совпадают с номером своей вспомогательной модели, соединены с соответствующими выходами блока настройки параметров, выходы основной модели соединены с соответствующими первыми входами сумма- тора, о тличающаяся тем, что, с целью расширения функциональных возможностей и области применения системы, в нее введены блок па мяти, блок задания уставок, блок вы- числения функционала, блрки вычисления частных производных, количество которых равно числу идентифицируемых параметров, оптимизатор, блок контроля сходимости, блок команд, элемент ИЛИ, блок ключей и сумматоры отклонений, включенные между каждым- выходом блока настройки параметров и параметрическим входом, номер которого совпадает с номером данной вспомогательной модели,.каждой из вспомогательных моделей, другие входы сумматоров отклонений соединены с соответствующими выходами блока
0 5 о Q
5
0
задания уставок, причем количество координатных входов блока памяти, соединенных с входами объекта, и выходов блока памяти, соединенных с координатными входами всех моделей, равно числу входов объекта, а количество координатных входов блока памяти, соединенных с выходом объекта, и выходов блока памяти, соединенных с соответствующими вторыми входами сумматора, равно числу выходов объекта, сигнальный выход блока памяти соединен с сигнальными входами блока настройки параметров и блока команд, первый выход которого соединен со стартовыми входами блока памяти,блока вычисления функционала, каждого из блоков вычисления частной производной и блока контроля сходимости, второй выход блока команд соединен -с управляющими входами блока контроля сходимости и блока настройки параметров, третий выход блока команд соединен с первым входом элемента ИЛИ, второй вход которого соединен с сигнальным выходом блока контроля сходимости, а выход - со стартовым входом блока настройки параметров и стартовым входом оптимизатора, сиг- нальньм выход которого соединен со сбросовым входом блока команд и управляющим входом блока ключей, выходы блока настройки параметров соединены с соответствующими параметрическими входами блока контроля сходимости, параметрические выходы которого соединены с соответствующими коммутируемыми входами блока ключей, выходы которого являются выходами системы, установочные входы блока настройки параметров соединены с соответствующими установочными выходами блОка задания уставок, а координатные входы блока настройки параметров и блока контроля сходимости соединены с выходами соответств тощих блоков вычисления частных производных, первый и второй установочные входы блока контроля сходимости соединены соответственно с первым и вторым выходами блока задания уставок, третий, четвертый и пятьй выходы которого соединены соответственно с первым, вторым и третьим установочными входами оптимизатора, параметрический выход которого соединен с первыми параметрическими входами каждого из блоков вычисления частной про13 1
иэводной и блока вычисления функционала, выход которого соединен с координатным входом оптимизатора и со- ответствзгющим координатнь М входом блока контроля сходимости, выходы сумматора соединены с соответствующими координатными входами каждого из блоков вычисления частной производной и координатными входами блока вычисления функционала, параметрические входы которого соединены с соответствующими выходами блока настройки параметров, а установочные входы соединены с соответствующими выхода-
2214
ми блока задания уставок, выходы каждой из вспомогательных моделей соединены с соответствующими координатными входами соответствующих блоков вычисления частной производной, выходы основной модели соединены с соответствующими координатными входами каждого из блоков вычисления частной производной, установочные входы которых соединены с соответствующими выходами блока задания уставок, а вторые параметрические входы соединены с соответствующими выходами блока настройки параметров.
Ai/2
I 3 51 V
пения
Фие.б
U7
55
53 52 50
Us
Фи. 5
Фиг.7
Фиг. 6
| Адаптивное устройство для идентификации линейных объектов | 1981 |
|
SU957168A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивные системы идентификации/ Под ред | |||
| В.И.Костюка | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
