(54) ОПТИМИЗАТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Оптимизатор | 1978 |
|
SU807204A1 |
| Многоканальный автоматический оптимизатор | 1985 |
|
SU1269095A1 |
| Многоканальный автоматический оптимизатор | 1980 |
|
SU949634A1 |
| Многоканальный оптимизатор | 1973 |
|
SU515084A1 |
| Устройство для определения состояния технического объекта | 1988 |
|
SU1557546A1 |
| Устройство для определения границы области работоспособности технических объектов | 1980 |
|
SU943650A1 |
| Устройство для определения границы области работоспособности технических объектов | 1980 |
|
SU954948A1 |
| Цифровой многомерный оптимизатор | 1989 |
|
SU1689919A1 |
| Устройство для контроля и измерения допустимого разброса параметров | 1988 |
|
SU1524069A1 |
| Устройство для определения оптимальных допусков и номиналов параметров электрорадиоэлементов | 1979 |
|
SU773631A1 |
1
Изобретение относится к технической кибернетике и может быть использовано для определения оптимальных пределов изменения и максимально допустимых шаговквантования параметров настраиваемых элементов технических объектов.
Известен оптимизатор, применякнаий статический способ распознавания С1 3 -.
В данном устройстве отсутствует терий прекращения процесса оптимизации при использовании так называемого слепого поиска, аналогично способу перебора, такие устройства непригодны дли оптимизации при варьируемых условиях эксплу-з атации.
Известен также оптимизатор, применяющий поисковый способ с использованием операторов чувствительности (градиентный способ) С2 J .
Данное устройство обладает следующими недостатками.
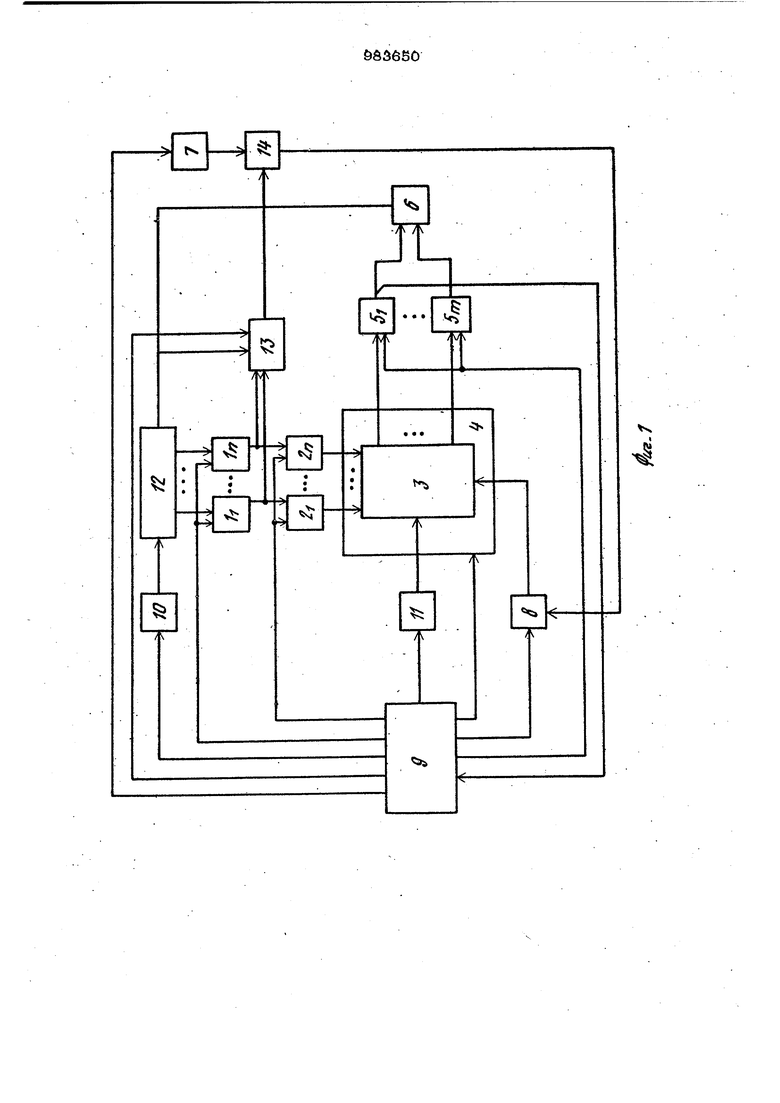
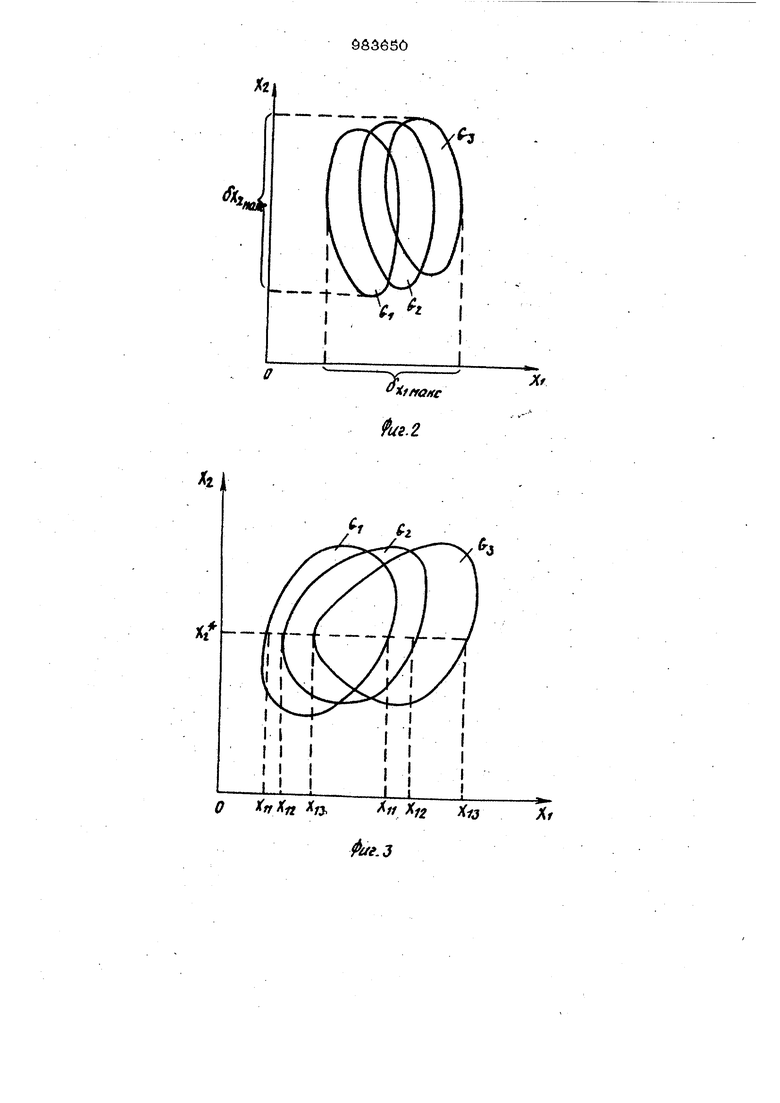
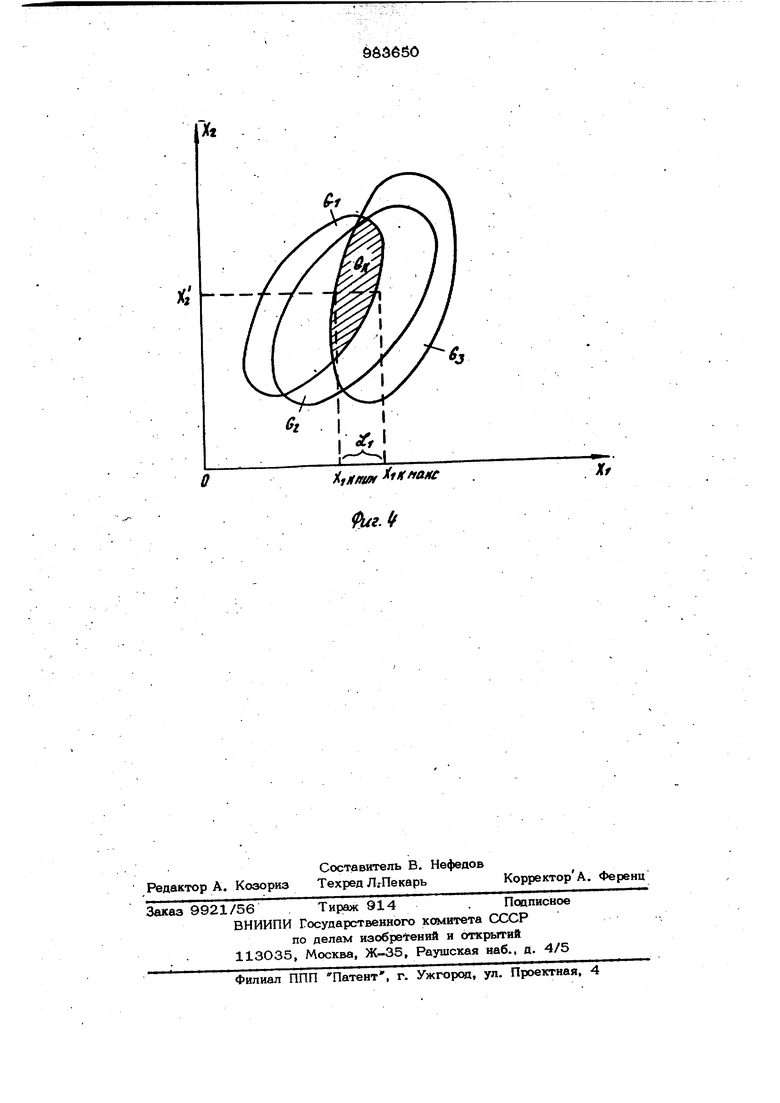
Успех оптимизации существенно зави сит от выбора длины шага при оптимизации, начального значения оптимизируемых параметров и от наличия и xapaKTej ограничений. Стационарная точка, в которой операторы чувствительности равны нулю, необязательно соответствует минимуму функции качества, она моисет соответствовать максимуму или быть седловой точкой.Данные устройства пригодны для оптимизации только дифференцируемых функций качества при фиксированных значениях условий эксплуатации и неоптимизируемых параметров и непригодны для определения оптимальных значений пределов изменения максимально допустимых шагов квантования параметров настраиваемых элементов, так как неизвестен вид зависимостей пределов изменения и максимально допустимых шагов квантова- ния от параметров настраиваемых элеме тов и эти зависимости нельзя определить непосредственно на техническом объекте. Кроме того, значения пределов изменения 3&6 и максимально допустимых шагов квантования параметров иАстрйиваемых эЛбМйнТов зависят от технологического разброса параметров комплектующих элементов и Ът условий эксплуатации. Наиболее близким по технической сущности к предлагаемому является оптимизатор, содержащий п реверсивных счетчиков, выходы которых через соответ ствующие преобразователи код-аналог соединенв с соответствующими входами объекта оптимизации, к первым входам блоков измерения функций качества подключены соответствующие выходы объекта .оптимизации, а ко вторым - соответствую щие первые выходы блока управления, вто рой выход которого соединен с вторыми входами преобразователей код- аналог, тре тий выход - с первыми входами реверсив ных счетчиков, четвертый выход - с управляющим входом генератора тактовых импульсов, соответствующие входы блока управления и элемента или соединены с соответствующими выходами блоков измерения функций качества, к соответствующим входам блока варьирования параметров подключены выходы генератора импульсов и элемента ИЛИ, выходы блока варьирования соединены с вторыми входами соответствующих реверсивных счетчи- ков, к входам блока памяти подключены соответствующие выходы реверсивных, счетчиков и блока управления, а выхбд блока памяти соединен с соответствующим, вход ом блока управления СЗ . Недостатком данного оптимизатора является непригодность его для определени оптимальных значений пределов изменени и максимально допустимых шагов квантования параметров настраиваемых элементов. Цель изобретения - расширение функциональных возможностей. Указанная цель достигается тем, что в оптимизатор, содержащий последователь но соединенные блок управления, генератор тактовых импульсов и блок варьирования параметров, выходы которого соединены через соответствующие реверсивные счетчики с первыми входами соответ ствующих преобразователей код-аналог и с соответствующими первыми входами блока памяти, второй вход.которого подключен к второму выходу блока управления, соединенного третьим выходом с вто ръ1ми входами реверсивных счетчиков, четвертым выходом - с вторыми входами преобразователей код-аналог, пятым выходом через соответствующие блоки из- 04 мерения критериев качества - с соответ- ствуюшими входами элемента ИЛИ, вькод которого подключен к второму входу блока варьирования параметров, причем блоки измерения критериев качества подключены вторыми входами к соответствующим выходам объекта, а выходами - к соответ- . :;твующим входам блока управления, выходы преобразователей код-аналог соединены с соответствующими первь1ми входами объекта оптимизации, введены вычислительный блок, блок задания критерия работоспособности, блок формирования тестовых сигналов, блок перебора реализаций и камеру испытаний, при этом третий вход блока памяти соединен с выходом элемента ИЛИ, а выход - с первым входом вычислительного блока, подключенного вто- рым входом к блоку задания критерия работоспособности, а выходом - через блок перебора реализаций - к второму входу объекта, блок управлейия подключен щестым выходом к входу блока задания критерия работоспособности, седьмым выходом - к входу камеры испытаний, восьмым выходом через блок формирования тестовых сигналов - к третьему вхо-, ду объекта, помещенного в камеру испытаний, девятым выходом - к второму входу перебора реализаций. На фиг. 1 изображена функциональная схема предлагаемого оптимизатора; на фиг. 2 - 4 - принцип действия оптимизатора. Опт1-гмизатор (фиг. 1) содерзжит п реверсивных счетчиков 1, преобразователей 2 код-аналог, объект 3 оптимизации, камеру 4 испытаний, пп блоков 5 измерения критериев качества, элемент ИЛИ 6, блок 7 задания критерия работоспособности, блок 8 перебора реализаций, блок 9 управления, генератор 10 тактовых импуль-- сов, блок 11 формирования тестовых сигналов, блок 12 варьирования параметров, блок 13 памяти, вычислительньй блок 14, при этом выходы реверсивных счетчиков 1 через соответствующие преобразователи 2 код-аналог соединены с соответствующими первыми входами объекта 3 оптимизации, помещенного в камеру4 испытаний, к nepBbDvi входам гп блоков 5 измерений критериев качества подключены соответствующие выходы объекта 3 оптимизации, а к вторъ1м - соответствующие первые выходы блока 9 управления, второй выход которого соединен с вторыми входами преобразователей 2 код-аналог, третий выход - с первыми входами реверсивных счетчиков 1, четвертый выход - с управляющим входом генератора 10 тактовых импульсов, пятый выход - с вхо дом блока 7 задания критерия работоспособности,; шестой выход - с входом блока 11 формирования тестовых сигналов, седьмой выход - с входом блока 8 перебора реализаций, восьмой выход - с входом камеры 4 испытаний, соответствующие входы блока 9 управления и элемента . ИЛИ 6 соединены с соответствующими выходами блоков 5 измерения критериев качества, к соответствующим входам блока 12 варьирования параметров подключены выход генератора 1О тактовых импульсов и выход элемента ИЛИ 6, выхоДы блока 12 варьирования параметров соединены с вторыми входами соответствующих реверсивных счетчиков 1, к входам блока 13 памяти подключены выходы реверсивных счетчиков 1, девятый выход блока Q управления и выход элемента ИЛИ 6,. выход блока 13 памяти соединен с первым входом вычислительного блока 14, к второму входу которого подключен выход блока 7 задания критерия работоспосо носги, выход блока 8 перебора реализаций и выход блока 11 формирования тестовых сигналов подключены к соответствующим объекта 3 оптимизации, выход вы числительного блока 14 соединен с вторым входом блока 8, перебора реализации. На фиг. 2-4 и далее по тексту приняты следующие обозначения: X(i l.n) текущее ;значение параметра f-ro настраиваемого элемента; п - число настраиваемых элементов объектна; G.j-j -ая область работоспособнсюти для /х-го комплекта активных элементов и номинальных значе ний параметров пассивных ненастраивае- мых элементов, под которой понимается множество значений параметров настраиваемых элементов, прн которых выполняется условие. «|min- a/()Qjmc.x, где Q; () - текущее значение j -го критерия качества) ®j rnin соответстренно минимальное и максимальное допустимые значения (4) (-J критерия, качества; &д jGii - области работоспособности технического объекта соответственно при Х +Д), (А 1,Ь), где Хд „ - номинальное значение Л - -гопассивного ненастраи- ваемого элемента; д X д - величина технояогическо1ч допуска значений Л -го пассивного ненастраивае- мого элeмeнтa . ti - число пассивных ненастрав- ваемых элементов X (Х„,) комбинация значений параметров пассивных и акти ных элементов.при которых производится проверка условий {l)s jic Q G л| -область работоспособности для /и,-го Комплекта активных элементов. и номинальных значений параметров пассивных ненастраиваемых элементов, под которой понимается множество значений параметров настраиваемых элементов, при которых выполняется условие (1) для всех m функций качества, 1,, где - количество комплектов активных элементов; F - параметр, характеризующий условия эксплуатации (влажность, температура, давление, частота вибрации и т.д.), Q(F) - область работоспособности объекта для /л,-го комплекта активных элементов при-F -ном воздействии на технический объект s. G :h-c.,;nnv nл ft р / область компромиссов, т.е. множество значений параметров настраиваемых элементов, при которых выполняется условие () для m функций качества при .изменении параметров пассивных ненастраивае- мых элементов в пределах допуска, при воздействии F условий эксплуатации для IUL-ГО комплекта актнвных элементов. Рц-область допустимых значений параметров настраиваемых элементов, определяемых неравенствами , X - . Х , (i l.n), где X-j. соответственно минимальное и максимальное значение i -го параметра настраиваемых элементов, i/imin -минимальное граничное значе.ние области работоспособности Сча i-ro najia- метра при /х-ном комплекте активных элементов; сЛХ{п1с(х минимальное значение п-редела изменения i -го параметра настраиваемых элементов. Объект 3 оптимизации представляет собой макет, содержащий л) комплектов активных элементов с произвольными значениями параметров, комплект пассивных ненастраиваемых элементов,ппрамотры &бз которых можно варьировать в пределах допуска, и комплект настраиваемых элементов. К активным OTHocsTTCfl элементы, параметры которых зависят от режима работы по постоянному току, например диоды, транзисторы, интегр)альные схемы и т.д. Остальные элементы являются пассивными (например, резисторы, конденсаторы и т.д.) Комплект составляет минимальное количество элеменгов,используемых вобьекте. Рекомендуется выбирать в пределах от 25 до 5О. Блок 12 варьирования параметров пред .назначен для плавного иЛи дискретного изменения оптимизируемых параметров ft зависимости от реализованного в оптимизаторе методаопределения границы .рбласти работоспособности в пространстве параметров настраиваемых элементов. . Если, например, реализован метод контурного обхода то блок варьирования зафиксирует (п- 2) параметра настраиваемых элементов и будет дискретно изменять в соответствии с методом контурного обхода значения остальных двух параметров J 1 f настраиваемых элементов. Блок 8 перебора реализаций в зависимости от поданных команд устанавливает в макете объекта .3 тот или иной комплект и пассивные ненастраактивных элементов иваемые элементы с теми или иными зна теми или иными зна- чениями. Определение оптимальных значений пределов изменения и максимально допустимых шагов квантования (МДШК) в предлагаемом оптимизаторе осуществляется следующим образом. По командам с блока 9 управления в блоке 7 задания критерия работоспособности задается численное значение крите- рия выбора МДШК, блок 8 перебора реали заций устанавливает в макете объекта 3 пассивные ненастраиваемые элементы с номинальными значениями параметров и один /U--и комплект активных элементов (р- 1,л)), устанавливаются начальные и конечные состояния реверсивных счетчиков 1, диапазон изменения которых через преобразователь 2 код-вналог охватывает всю область возможных изменений параметров настраиваемых элементов РЦ , в j-и блок 5 измерения критериев качества J, блок 9 управления записывает знaчeJ ия критерия качества Qy , и (j 1,т) на вход собранного макета объекта 3 из блока 11 формирования тестовых сигналов подается комплекс входных сигналов. В камере 4 испытаний устанавливаются номинальные значения параметров, характео8ризующих условия эксплуатации (например, номинальное значение температуры окружающей среды). Затем блок 9 управления запускает генератор 10 тактовых импульсов, сигналы которого через блок 12 варьирования параметров подаются на входы счетчиков 1, которые изменяют свое состояние. Соответственно измен$пот- ся через преобразователи 2 код-аналог значения параметров настраиваемых элементов Xц объекта 3. Варьирование параметров настраиваемых элементов приводит к изменению состояния объекта 3. В каждом новом состоянии объекта 3 в j -м блоке 5 измерения критериев качества производится измерение и сравнение те . критерия качеств а (X) задаиньп Q . и Q,- , . Когда и; (Х) (3:„. или (. (Х) i37mL на выходе j g мерени ункции качества соответственно, на выходе элемента мпп « . ИЛИ Ь появится сигнал, который подает- ся на соответствующие входы блока 13 памяти и блока 12 варьирования парамет- pQg Состояния счетчиков 4, соответствующие граничным значениям параметров настраиваемых элементов области G/xj . записываются в блок 13 памяти. Окончательно в блоке 13 памяти запищутся все -,- . п граничные точки области fiai Подобная процедура определения граничных точек для других критериев качества при комплекте активных элементов повторяется (п раз. Затем блок 13 памяти определяет область компромиссов .n G После этого по команде с блока 9 управления блок 8 перебора реализации Останавливает в макете объекта 3 (yU+l )-й комплект активных элементов, и цикл определения области компромиссов для нового комплекта активных элементов повторяется. Описанная процедура повторяется для всех комплектов активных элементов. В итоге в блоке 13 памяти запишутся координаты граничных точек, со- ответствуюшие семейству областей {Ч/, V . Затем по команде с блока 9 управления по данным, записанным в блоке 13 памяти, вычислительный блок 14 определяет пределы изменения параметров настраиваемых элементов, которые охватывают границы всех областей из семейства Например, на фиг. 2 приведен пример определения минимально возможных пределов изменения параметров (,2) при л) 3, а максимальные преsббзцелы изменения параметров настраиваемых элементов теоретически могут изменять, ся от О до со . Сужение минимальных пределов изменения параметров настраиваемых элементов осуществляется следующим образом. Вычислительныйблок 14 для каждого параметра, кроме одного (например Х,), Быбирает и фиксирует его конкретное зна- чение из интервала (). На базе информации о координатах граничных точек семейства областей {О-и вычислительный блок 14 формирует совокупность минимальньгх значений параметра ,,Л где минимальное значение параметра X для области С1Уд. при фиксированных значениях остальных параметров настраиваемых элементов. Например, эту совокупность составят значения Х, , (фиг. 3). В принципе, аналогичноиЗложенному выше, вычислительный блок 14 может формировать совокупность максимальных значений параметра К (например, значения Х , Х, ,Х на фиг. 3). На основе совокупности пип}«ь.числительный блок 14 определяет закон распределения этой совокупности значений. Если в качестве критерия сужения максимальных пределов параметра Х в блоке 7 записано численное значение вероятносТи обеспечения работоспособного состояния объекта 3, то по сигналу с выхода блока 7 задания критерия работоспособности вычислительньй блок 14 по известному закону распределения величин Х..1рвпределяет пределы изменения параметра Х , которые обеспечивают это значение вероятности. Оптимальным пределом являются значения параметра Х , составляющие- наименьший интервал, по которому необходимо интегрировать плогность вероятности величины , чтобы получить заданную вероятность обеспече- кия работоспособного состояния объекта 3. Для других параметров их оптимальные пределы определяются аналогично. Дляопределения МДШК по команде с блока 9 управления в камере 4 испыта- НИИ, объект 3 подвергается соответствуютему воздействию F (например, повышает температуру, устанавливает частоту и амплитуду вибрации, влажность и т.д.) После этого определяется область работоспособности (ч1х() граничные точки которой запишутся в блоке 13 памяти (,A)). В итозте, в блоке 13 памяти запомнятся координаты граничных точек семейства областей ) (М 1.)). .16 Вычислительный блок 14 вычисляет среднее значение величины .цт1п определяет номер комплекта активных элементов, у которого граничные значения пара- метров настраиваемых элементов наиболее близки к среднему значению случайней величины команде с вычислительного блока 14 блок 8 перебора реализаций устанавливает в объекте 3 данный комплект активных элементов и увеличивает значение одного из пассивных ненастраиваемых элементов Хдна величину допуска аХ; . Затем определяются координаты граничных точек области Q V . которые запоминактг-- - „ся в блоке 13 памяти. Затем блок 8 пв- ребора реализаций устанавливает в объекте и тот же пассивный элемент с отр1Ь- нательным допуском (-лАд), и.вновь определяются координаты граничных точек областиЬ которые запоминаются в бпо ке 13 памяти. Указанные операции повто ряются для всех пассивных ненастраивае-. мых элементов. В результате блок 13 памяти запомнит координаты граничных очек областей -G. 1IVi Далее вычислительный блок 14. определяет область RCSMпромиссов П П Q.JF), К . 1 -, 1 -f F / затем МДШК для параметра X, как разность его граничных, значений 5fii(,fj wXi cfYicix принадлежащих .области компромиссов d при фиксированных значениях других параметров настраиваемых элементов. На фиг. 4 приведен МДШК параметрй Х, обозначенный как L, . При отсутствии области G выбор МДШК параметров настраиваемых элементов осуществляется следующим образом, Пусть область Ц, не пустая, если исключить из рассмотрения области G и соответствующие увеличению значения Тр-го ненастраиваемого пассивного элемента на величину ЛХ/г-и уменьщению значения 5-го ненастраиваемого пассивного элемен . . та на величину дХ (,t, у 1,Ь). Тогда вычислительный блок 14 исключает координаты граничных точек, соответствующие областям и дает коман-. ду блоку 8 перебора реализаций на увеличение в объекте 3 значения Т-го параметра на величину ci- .) при определенном значении oL. Значение ei увеличивают до тех пор, пока объединение IJбё и является не nycTbtM. В данном случае ci определяет верхний предел иэменения -р-го параметра, т.е. класс точности у-го ненастраиваемого элемента. Аналогично протекают операции ПРИ УМень шении 5-го napaNeTpa на величинус ЛХзВ результате применения предлагаемого оптимизатора определяются пределы изменения и максимально допустимьА шаг квантования параметров варьируемых (на- страиваемых) элементов с учетом технологического разброса параметров пассивных и активных элементов; изменения условий эксплуатации в заданных предеnaxj множества выходных параметров технического объекта, определяющих его работоспособность. Определяются также целесообразные классы точности комплектующих пассивны элементов, что позволит уменьшить количестно используемых типономиналов. изобретения р м у л а Оптш)лизатор, содержаший последовательно соединенные блок управления, гене ратор тактовых импульсов и блок варьирбвания параметров, выходы которого сое динены через соответствующие реверсивные счетчики с первыми входами соответствующих преобразователей код-аналог и с соответствующими первыми входами блока памяти, второй вход которого подключен к второму выходу блока управления, соединенного третьим выходом с вто рыми входами реверсивных счетчиков, четвертым выходом - с вторыми входами преобразователей код-аналог, пятым выхо дом через соответствующие блоки измерения критериев качества - с соответстбвующими входами элемента ИЛИ, выход которого подключен к второму входу блока варьирования параметров, причем блоки измерения критериев качества подключены вторыми входами к соответствующим выходам объекта, а выходами - к соответствующим входам блока управления, вькоды преобразователей код-аналог соединены с соответствующими первыми входами объекта оптимизации, отличающ и и с я тем, что, с целью расширения функциональньсх возможностей оптимизатора, он содержит вычислительный блок, блок задания критерия работоспособности, блок формирования тестовых сигналов, блок перебора реализаций и камеру испытаний, при этом третий вход блока памяти соединён с выходом элемента ИЛИ, а вькод - с первым входом вычислительного блока, подключенного вторым входом к блоку задания критерия работоспособности, а выходом - через блок перебора реализаций к второму входу объекта, блок управления подключен mecTbnvi выходом к входу блока задания критерия .работоспособности, седьмым выходом - к входу камеры испытаний, восьмым выходом через блок формирования тестовых, импульсов - к третьему входу объекта, помешенного в камеру испытаний, девятым выходом - к второму входу блока перебора реализаций. Источники информации, гГринятые во внимание при экспертизе li Авторское свидетельство СССР № 51427О, кл. t 05 В 13/0,2, 1976. 2.Авторское свидетельство СССР Mb 485412, кл. G О5 В 13/02, 1976. 3.Авторское свидетельство СССР по заявке № 2701491/18-24, кл. Q 05 6 13/00, 1978 (прототип).
л.
mott
tfra/fc
Xt
О XffXff X/j,X// X/2 X/j
Af
fej
х;
KiHtafff iKf tfc
Hit
г.
