Изобретение относится к автоматическим приборам, предназначенным для определения характеристик оптических изображений. Оно может быть использовано в кибернетических устройствах .распознавания .образов, в космической и воздушной навигации, медицинской диагностике и других отраслях науки , и техники,
Известен автоматический телевизионный коррелятор, обладакнций
большими ВОЗМОЖНОСТ}МИ (lj .
Однако в нем для сдвига изображений используется электромеханический привод, ограничивающий йозможности коррелятора.
Наиболее существенными недостахКс1ми известных корреляторов , являются конструктивная сложность, низкие надежность и эксплуатационные ка;Чества.
Широко известны более простые одномерные корреляторы,построенные по классической схеме с переменной лини ей задержки,одним из которых являетс коррелятор, содержгиций телевизионную камеру, выход которой подсоединен к перемножителю и Переменной линии задержки, подключенной к второму :вхо
ду перемножителя, перемножитель .соединен с интегратором, за которым следует регистратор 2j .
Недостатком данного коррелятора является ограниченная возможность и низкая точность из-за наличия переменной линии .задержки, предназначенной для сдвига считываемых участков изображения. Кроме того, он не является автоматическим.
Для устранения отмеченных недостатков в основу предлагаемого авто- коррелятора положен другой принцип сдвига считываемых, участков изображения. Суть этого принципа состоит в том, что фиксируют изображение на .фотокатоде передающей трубки и рериодическ-и смещают строчную разэертку путем изменения .периода следования импульсов строчной развертки, оставляя неизменной длительность самой разверткиf Реализация такого принципа предполагает .некоторую доработку электронной части известного но зато позволяет использовать линию задержки постоянной .длительности, тем самым удовлетворить, более широки требованиям, предъявляемым к коррелятору и избавиться от вышеизложенHfcjx недостатков. При этом отпадает необходимость в изменении параметров линии задержки.
Цель изобретения - повышение точности.
Эта цель достигается тем, что в телевизионный автокоррелятор,. содержащий телевизионную камеру, оптический вход которой является входсм автокоррелятора, управляющий вход соединен.с выходом блока строчной развертки, а выход соединен с входом линии задержки и первм( входом блока y лнoжeния, второй вход которого подключен к выходу лиНИИ задержки, выход блока умножения соединен с входом -ин егратора выход которого подключен к информа.ционному входу регистратора, управляющие входы интегратора и регистратора соединены с первым выходом синхрогенератора, введены блок формирования импульсов переменной длительности и блок формирования сигналов запуска строчной развертки, входы блока формирования импульсов переменной длительности соединены с первым и вторым выходами синхронизатора, а выход подключен к входу блока формирювания сигнала запуска строчной развертки, выход которого подключен к входу блока строчной развертки.
Детальное описание устройства и работы предлагаемого автокоррелятора излагаются на примере использования в качестве блока формирования переменной длительности преобразователя с широтно-импульсной модуляцией, а в качестве блока формирования сигналов запуска; строчкой раз вертки - дифференцирующей цепи с двухполупериодны1ч1 выпрямителем на.выходе.
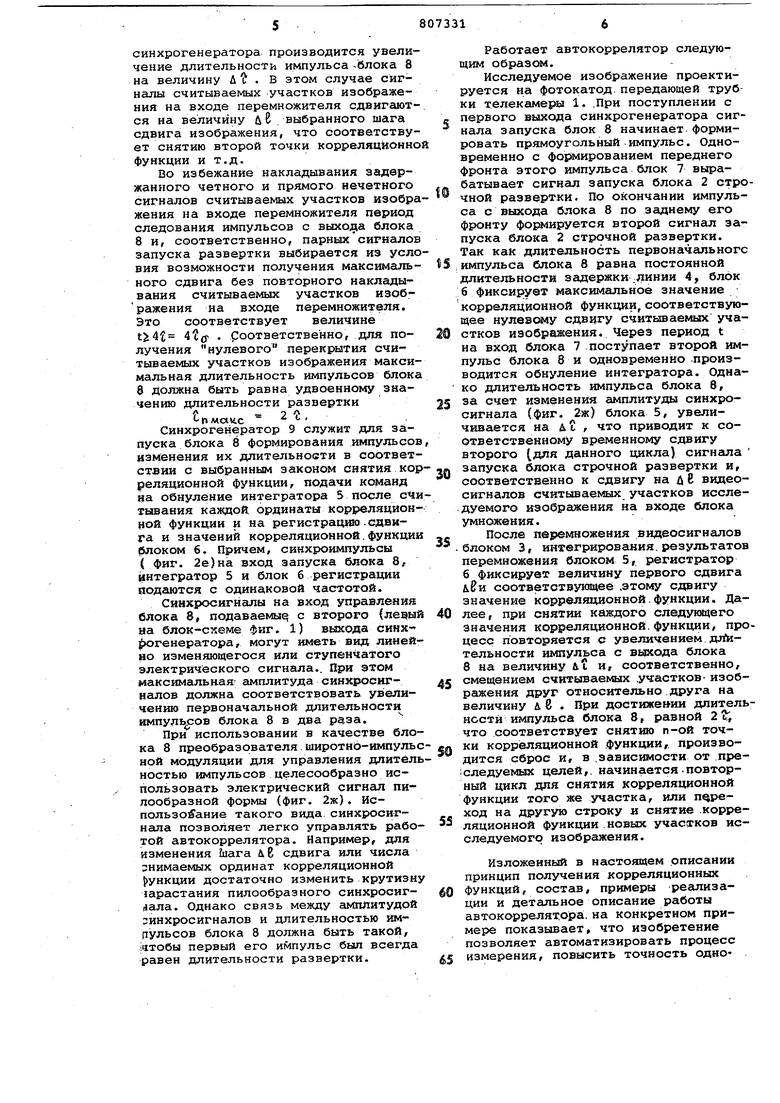
На фиг, 1 изображена блок-схема автокоррелйтора; на фиг. 2 «- формы Сигналов на выходе отдельных его блоков.
Автокоррелятор содержит телевизионную камеру 1 с однострочной ; разверткой, вход которой подключен к выходу блока 2 строчной развертки, а выход к блоку 3 умножения и постоянной линии 4 задержки, подключенной к второму-входу перемножителя, интегратор 5, включенный между выходом блока 3 и блоком 6 регистрации, блок 7 форм-ирования. сигналов запуска строчной рг звертки, подключенный выходом к блоку 2, а входом к выходу блока 8 формирова ния импульсов переменной длитвль- . ностн, входы запуска и управления которого подключены соответственно к первому и второму выходам синхрогенератора 9, первый выход которого подключен одновременно к интегратору 5 и блоку б регистрации.
Телевизионная камера 1 служит для гфеобразования оптического изоб.ражения в электрический сигнал. Блок 2 строчной развертки служит для формирования электрического сигнала пилообразной формы. Устройство таких блоков широко известно в тел евизионной технике. Блок ,3 умножения, линия 4 задержки и интегратор 5 служат для преобразования {в соответствии с их названием сигналов, поступающих с выхода телевизионной камеры, в соответствующие значения определяемой корреляционной функции.
Блок б регистрации предназначен для регистрации сдвига изображений и значений корреляционной функции в соответствующих точках сддига.
Блок 7 формирования сигналов запуска строчной развертки и блок 8 формирования импульсов переменной длительности служат, для смещения следующих друг за другом моментов запуска строчной развертки на некоторую фиксированную величину Д и. Соответственно, сдвига электрического видеосигнала на входах перемножйтеля на определенный д шаг, выбираемый йа основе требований, предъявляемых к автокоррелятору. Такими требованиями могут быть: время Т определения корреляционной функции, шаг сдвига дС считываемых участков изображения при снятии точек корреляционной Функции, количество п снимаемых точек и др.
Рассмотрим .более подробно выбор длительности 2 развертки, временных параметров задержки, периода t следования, величины д.1) дискретного увеличения и максимальной длительности импульсов управления, поступающих с блока 8.
Длительность развертки выбирается равной длительности времени снятия одной точки корреляционной функции, а длительность задержки t0 сигнала линией задержки, во избежание непреднамеренного .перекрьпгия считываемых участков изображения на входе перемножителя, выбираете равной ИЛИ больше длительности развертки t, Желательно выполнение равенства
В этом случае первый и следующий за ним без временного интервала второй сигналы считываемых участков изображения полностью перекрывгшзтся на входе блока 3 умножения, что соответствует снятию точки с максимальным значением корреляционной функции
Для осуществления снятия первой и последующих точек корреляционной функции.блоком 8 вырабатывается первоначальный импульс, равный по , длительности t мин (фиг. 2д) длительности развертки (фиг. 26), а запуск развертки, производится сигналами фиг. 2г) , формируемыми блоком 7 по переднему и заднему фронтам импульсов, поступеиощих с блока 8. Далее управляющим сигналом с выхода синхрогенератора производится увели чение длительности импульса блока 8 на величину Д . В этом случае сигналы считываемых участков изображения на входе перемножителя сдвигают ся на величину и 0 выбранного шаге сдвига изображения, что соответству ет снятию второй точки корреляционно функции и т.д. Во избежание накладывания задержанного четного и прямого нечетного сигналов считываемых участков изобр жения на входе перемножителя период следования импульсов с выхода блока 8 и, соответственно, парных сигналов запуска развертки выбирается из усло вия возможности получения максималь ного сдвига без повторного накладывания считываемых участков изображения на входе перемножиталя. Это соответствует величине 4(У . роответственно, для получения нулевого перекрытия считываемых участков изображения максимальная длительность импульсов блока S должна быть равна удвоенному значению длительности развертки t-r «01К.С 2 t , Синхрогенератор 9 служит для запуска блока 8 формирования импульсов изменения их длительности в соответствии с выбранным законом снятия кор реляционной функции, подачи команд на обнуление интегратора 5 после счи тывания каждоЯ ординаты корреляционной функции и на регистрацию.сдвига и значений корреляционной.функции блоком 6. Причем, синхроимпульсы (фиг. 2е)на вход запуска блока 8, Интегратор 5 и блок б регистрации подаются с одинаковой частотой. Синхросигналы на вход управления блока 8, подаваемы с второго ( аа блок-схеме фиг. 1) выхода синх- генератора, могут иметь вид линейно изменяющегося или ступенчатого электрического сигнала.. При этом максимальная: амплитуда синхросигналов должна соответствовать увеличению первоначёшьной длительности импульсов блока В в два рдза. При использовании в качестве блока 8 преобразователя широтно-импульс ной модуляции для управления длитель ностью импульсов целесообразно использовать электрический сигнал пилообразной формы (фиг. 2ж). Использование такого вида, синхросигНсша позволяет легко управлять работой автокоррелятора. Например, для изменения biara л 6 сдвига или числа знимаемых ординат корреляционной 5)ункции достаточно изменить крутизну шрастания пилообразного синхросиг|1ала. Однако связь между гц тлитудой синхросигналов и длительностью имггульсов блока 8 должна быть такой, «тобы первый его импульс был всегда равен длительности развертки. Работает автокоррелятор следующим образом. Исследуемое изображение проектируется на фотокатод.передающей трубки телекамеры 1. .При поступлении с первого выхода синхрогенератора сигнала запуска блок 8 начинает формировать прямоугольный.импульс. Одновременно с форЯйированием переднего фронта этого импульса блок 7 вырабатывает сигнал запуска блока 2 строчной развертки. По окончании импульса с выхода блока 8 по заднему его фронту формируется второй сигнал запуска блока 2 строчной развертки. Так как длительность первоначального импульса блока 8 равна постоянной длительности задержки ;ЯИНИи 4, блок 6 фиксирует максимальное значение корреляционной функции, соответствующее нулввс 4у сдвигу считываемых участков изображения. Через период t на вход блока 7 поступает второй импульс блока 8 и одновременно производится обнуление интегратора. Однако длительность импульса блока 8, за счет изменения амплитуды синхросигнала (фиг. 2ж) блока 5, увеличивается на & , что приводит к соответственному временному сдвигу второго (для данного цикла) сигнала запуска блока строчной развертки и, соответственно к сдвигу на д 6 видеосигналов считываемых участков исследуемого изображения на входе блока умножения. После перемножения видеосигналов блоком 3, интегрирования,результатов перемножения блоком 5, регистратор 6 фиксирует величину первого сдвига &2и соответствующее .этому сдвигу значение корреляционной.функции. Далее, при снятии каждого следукидего значения корреляционной.функции, процесс повторяется с увеличением длЛ1тельности импульса с выхода блока 8 на величину ft.t и, соответственно, смещением считываемых .участков- изображения друг относительно друга на величину д S . При достижении длительности импульса блока 8, равной 21, что соответствует снятию п-ой точки корреляционной .функции, производится сброс и, в .зависимости от преследуемых целей,, начинается.повторный цикл для снятия корреляционной функции того же участка, или п реход на другую строку и снятие .корреляционной функции новых участков исследуемого изображения. Изложенный в настоящем описании принцип получения корреляционных функций, состав, примеры реализации и детальное описание работы автокоррелятора, на конкретном примере показывает, что изобретение позволяет автоматизировать процесс измерения, повысить точность одно
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионный автокоррелятор | 1977 |
|
SU705477A1 |
| Устройство совмещения изображений телевизионной стереопары | 1987 |
|
SU1438024A2 |
| ТЕЛЕВИЗИОННЫЙ КОРРЕЛЯТОР | 1969 |
|
SU249430A1 |
| Устройство для считывания и определения параметров движения констрастного изображения | 1976 |
|
SU717796A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 1990 |
|
SU1823773A1 |
| ТЕЛЕВИЗИОННО-КОРРЕЛЯЦИОННЫЙ ДАЛЬНОМЕР | 1994 |
|
RU2086918C1 |
| Устройство для измерения перемещения объектов | 1982 |
|
SU1045411A1 |
| Устройство тактовой синхронизации псевдослучайных последовательностей | 1982 |
|
SU1048581A1 |
| Устройство для считывания кодограмм | 1977 |
|
SU736136A1 |
