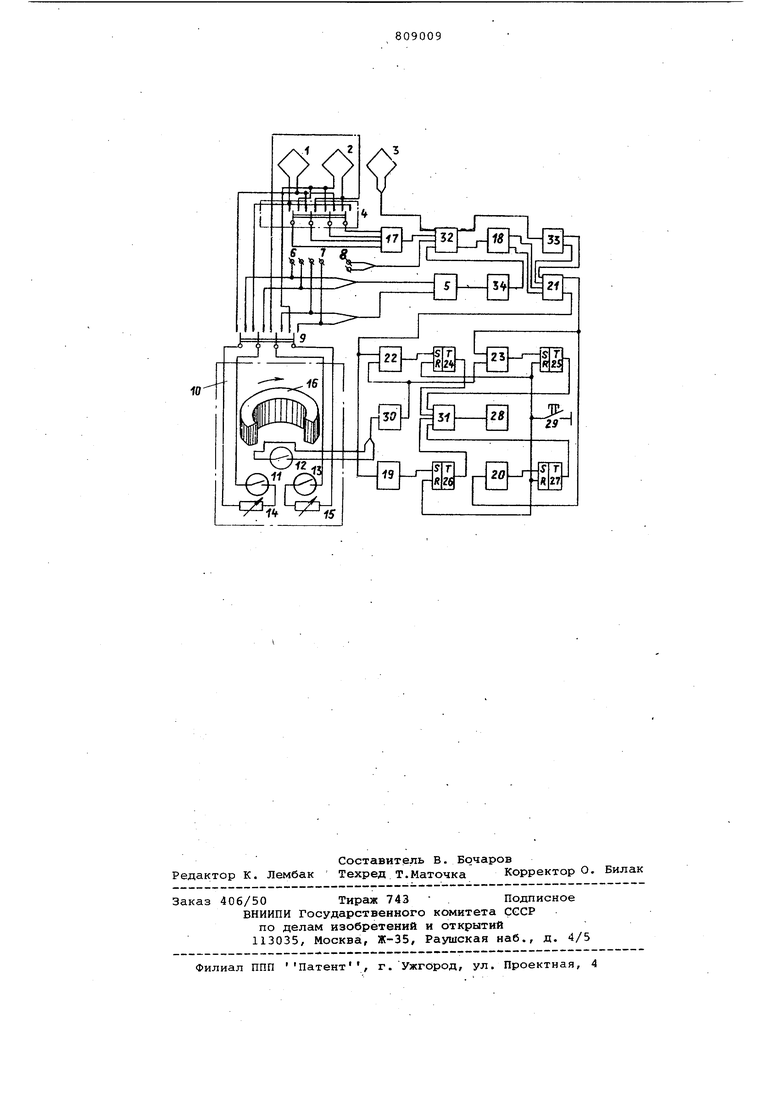
ков сравнения частот и входами первого и второго селекторов длительности сигналов, выходы которых соеди.нены с S-входами соответственно первой и второй ячеек памяти, R-входы которых соединены между собой, с кнопкой сброса памяти и с R-входами третьей и четвертой ячеек памяти, S-входы которых соединены с. выходами соответственно первого и второго блоков сравнения частот, вторые входы которых соединены между собой и с выходом ждущего генератора, вход которого соединен с первым и вторым выводами блока имитатора движения подвижных объектов, выхода первой, второй, третьей и четвертой ячеек памяти соединены с соответствующими входами четырехвходового элемента И, выход которого соединен со входом блока индикации, вход первого испытуемого блока соединен с выходом первого блока имитатора измене,НИН направления движения подвижных объектов, входные зажимы которого соединены ссоответствующими выводами розеток для подключения проверяемых приемных антенн,входы-первого эталонного блока соединены с входными зажимами второго блока имитатора изменения направления движения подвижных объектов, выходные зажимы которого соединены с выводами эталон ных приемных антанн,входные зажимы переключателя соединены соответственно с третьим, четвертым, пятьм и шестым выводами блока имитатора движения подвижных объектов, при этом блок имит;атора движения подвижных объектов содержит вращающийся кольцевой магнит с зазором, три магнитоуправляемых контакта, первый из которых расположен симметрично к диаметрально противоположно второму и третьему магнитоуправляе.1ым котактам, и два переменных резистора, причем первый магнитоуправляемый контакт соединен с первым и вторым выводами блока имитатора движен.ия подвижных объектов, первые выводы второго и 1ретьего магнитоуправляемых контактов соединены соответственно с третьим и четвертьвд выводами, а вторые выводы - через переменные резисторы соединены соответственно с пятым и шестым выводами блока имитатора движения подвижных объектов. На чертеже изображена блок-схема , устройства.
Устройство содержит эталонные приемные антенны 1 и 2, эталонную
блоки 4 и 5
Передающую антенну
имитаторов, изменения направления движения подвижных объектов, ро-. ветки 6,7 и 8 для, подключения проверяемой передающей антенны, переключатель 9, блок 10 имитатора движения подвижных объектов, содержащий магнитоуправляемые контакты 11, 12 ;
и 13, переменные резисторы 14 и 15 и вращающийся кольцевой магнит 16 с зазором, эталонные блоки 17 и 18, селекторы 19 и 20 длительности сигналов, блок переключения выходных каналов 21, блоки 22 и 23 сравнения частот, ячейки 24, 25, 26 и 27 памяти, блок 28 индикации, кнопку 29 сброса памяти, ждущий генератор 30, четырехвходовый элемент И 31, коммутирующий блок 32 и испытуемые блоки 33 и 34.
Устройство работает следующим,образом.
В исходном состоянии эталонные приемные антенны 1 и 2 подключаются к коммутирующему блоку 32, через блок 4 имитатора изменения направления движения подвижных объектов, а подключение переменных резисторов 14 и 15 к эталонным приемным антеннам 1 и 2 через ,магнитоуправляемые
.контакты 11 и 13 происходит с помощью переключателя 9. Кроме того, ко Ф1утирующим блоком 32 осуществляется необходимая коммутация между эталонным блоками 17 и 18 и отключение испытуемых, блоков 33 и 34, а также розетки 8 для подключения проверяемой передающей антенны. Блоком переключения выходных каналов 21 производится подключение выходного канала, устройства к блоку 22 сравнения частот и селектору 19 длительнотж сигналов или к блоку 23 сравнени частот и селектору 20 длительности сигналов в соответствии с положение блока 4 имитатора изменения направлния движения подвижных объектов.
Задавая необходимую скорость вращег ия вращающемуся кольцевому магниту 16 с зазором блока 10 имитатора движения подвижных объектов, добиваются необходимой степени моделиро вания скорости движения реальных транспортных средств, например шахт ных вагонеток. Величина зазора вра,щающегося кольцевого магнита 16 определяется из соотношения
р 5$Ь ,-
50
где 6 и длина дуги зазора и диаметр вращающегося кольцевого магнита 16;
е. расстояние между шахтны5
МБ ЕО ми вагонетками; длина шахтной вагонетки. Величина зазопа и возможность регулировки скорости вращения вращающегося кольцевого магнита 16 позво0ляет имитировать движение различных подвижных объектов с разными скоростями их движения длина дуги 6 зазора моделирует величину межвагонеточного пространства шахтных вагонеток,
5 ,нахрдяшихся в составе. В результате вращения вращающегося кольцевого ма нита 16 с зазором происходит -срабатывание и отпускание магнитсуправляемых контактов 11 и 13 в следующей последователь но.сти: 11, 01, 00, 10, 11, где индексу Ч соответствует разомкнутое состояние, а индексу С - замкнутое состояние магнитоуправляемых контактов 11 и 13, магнитоуправляемый контакт 12 предназ.начен для запуска гчдущего генератор 30 в соответствии с вращением враща щегося кольцевого магнита 16 с зазо ром. Срабатывая и отпуская в указанной последовательности магнитоуправ ляемые контакты 11 и 13, шунтируют в той же последовательности эталонные приемные антенны 1 и 2 переменными резисторами 14 и 15, вследстви чего с, выводов блока 10 имитатора движения подвижных объектов поступа алгоритм направления счета, аналогичный алгоритму при прохождении через зону действия устройства сост ва шахтных вагонеток. После одного полного оборота вращающегося кольцевого магнита 16 с зазором на одном из выходов блока переключения выход ных каналов 21 появится сигнал.информации счета,, который поступит на один из- входов блока 22 сравнени частот и на вход селектора 19 длител ности сигналов, который производит поопускание сигналов с длительностью не меньше заданной на вход ячейки 26 памяти и далее на один из входов четырехвходового элемента И 31. Если же длительность выходного сигнала информации счета не соответству ет установленной, то на выходе ячей ки 26 памяти сигнал не появится, как и на входе четырехвходового элемента И 31, в результате чего блок 28 индикации выдаст информацию о несоответствии проверяемого изделия по данному параметру. В блоке 22 сравнения частот происходит определение ;достоверности вьвдаваемой устройством информации. Сравниваемые частоты пос тупают на вход блока 22 сравнения частот с ждущего генератора 30, управляемого магнитоуправляемьм контактом 12 и выходным каналом блока переключения выходных каналов 21. Так как сигналы со ждущего генератора 30 и выхода блока переключения выходных каналов 21 появляются сиихронно с вращением вращающегося кольцевого магнита 16 с зазором, то при исправном изделии число выходных каналов 21 должно совпадать. Несовпадение же числа импульсов ждущего генератора 30 и импульсов, выдаваемых проверяемым изделием, говорит о несоответствии последнего заданным требованиям. На выходе блока 22 сравнения частот сигнгшне появится, с выхода четырехвходового элемента И 31 не поступит разрешающий сигнал в блок 28 индикации для выдачи информации о исправности проверяемого изделия. Для проверки реа;хции устройства на изменение направления движения подвижных объектов блок 4 имитатора изменения направления движения подвижных объектов и блок переключения выходных каналов 21 переключаются в положения, обратные исходному, в результате чего изменяется порядок подключения эталонных приемных антенн 1 и 2, и с выводов блока 10 имитатора движения подвижных объектов поступает сочетание сигналов, обратное исходному, т.е. 11, 10, 00, 01, 11, а информация счета появится на втором выходном канале блока переключения выходных каналов 21. Дальнейшая работа устройства аналогична описанной выше, с той разницей, что работают блок 23 сравнения частот и селектор 19 длительности сигналов. Если изделие соответствует всем проверяемым параметрам (чувствительность, быстродействие, длительность выводного сигнала информации, достоверность выдаваемой устройством информации при требуемых колебаниях питающего напряжения и температуры окружающей среды), то на всех входах четырехвходового логического элемента И 31 наблюдаются сигналы и блок 28 индикации выдаст информацию об исправности проверяемого изделия. Все эти параметры проверяются параллельно, что позволяет сокращать время проверки, а наличие индикаторов (не показаны) в блоках 22 и 23 сравнения частот и селекторах 19 и 20 длительности сигналов дает возможность определять, какому параметру не соответствует изделие. Кроме того, время проверки значительно сокращается за счет возможности вращения вращающегося кольцевого магнита 16 с зазором с большой скоростью и отсутствия необходимости в ревер- сировании направления его дрижения. После настройки устройства на заданные параметры производится контроль испытуемых блоков 33 или 34, при этом коммутирующий блок 32 отключает эталонный блок 17 или 18 и подключает испытуемый блок 33 или 34. Использование предлагаемого устойства позволяет значительно улучить контроль качества выпускае1лых экранных датчиков контроля положения одвижных объектов и сократить время. их проверки. Формула изобретения 1. Устройство для испытания экранных, датчиков контроля положения подвижных объектов, содержащее зталонную передающую антенну, соединенную с одним из входов коммутирующего блока, другие входы которого соединены с первым и вторым эталонными блоками, с первым и вторым испытуемми блоками и р9зеткоЯ для подключения -проверягмой передающей антенны, блок переключения выходных каналов, входы которого соединены соответственно с выходами второго эталонного и второго испытуемого блоков, эталонные приемные антенны, соединенны через переключатель с блоком имитатора движения подвижных объектов, розетки длэ подключения проверяемых приемных антенн,соединенные с соответствующими зажимами выхода переключателя, отличающееся тем, что, с целью расширения функциональных возможностей и сокращения времени проверки серии однотипных изделий, в него введены два блока имитатора изменения напраления движения подвижных объектов, четырехвходовый элемент И, два блока сравнения частот, ждущий генератор, два селектора длительности сигналов, четыре ячейки-памяти и кнопка сброса памяти, причем первьпй и второй выходы блока переключения выходных каналов соединены с первыми входами соответственно-первого и второго блоков сравнения частот и входами первого и второго селекторов длительности сигналов, выходы которых соединены с S-входами соответственно первой и второй ячеек памяти, R-входы которых соединены между собой, с кнопкой сброса памяти и с R-входами третьей и четвертой ячеек памяти,S-входы которы:: соединены с выходами соответственно первого и второго блоков сравнения частот, вторые входы которых соединены между собой и с выходом ждущего генератора, вход которого соединен с первым и вторым выводами блока имитатора движения подвижньлх объектов, выходы первой.
второй, третьей и четвертой ячеек памяти соединены с соответс-твующими входами четырехвходового элемента И, выход которого соединен совходом блока имитации, Jвxoд первого испытуемого блока соединен с выходом первого блока имитатора изменения направления движения подвижных объектов, входные зажимы которого соединены с соответствующими выводами розеток для подключения проверяемых приемных антенн, входы первого эталонного блока соединены со входными зажимами второго блока имитатора изменения направления движения подвижных об-ьектов, выходные зажимы которого соединены с выводами эталонных приемных антенн, входные зажимы переключателя соединены соответственно с третьим, четвертым, пятым и шестым выводами блока имитатора движения подвижных объектов.
2. Устройство по п. 1, отличающееся тем, что, блок имитатора движения подвижных объектов содержит вращающийся кольцевой магнит с зазором, три магнитоуправляемых контакта, первый из которых расположен симметрично и диаметрально противоположно второму и третьему магнитоуправляемым контактам, и два переменных резистора, причем первый магнитоуправляемый контакт сое динен.с первым и вторым выводами блока имитатора Движения подвижных объектов, первые выводы второго и . третьего магнитоуправляемых контакто соединены соответственно с третьим и четвертым выводами, а вторые выводы этих магнитоуправляемых контактов через переменные резисторы соединены соответственно с пятым и шестыт/1 выводами блока имитатора движения подвижных объектов.
Источники информации, принятые во внимание при экспертизе
1. Приспособление для испытания .датчика ДКП. Паспорт. Конотоп, Завод Красный металлист (прототип) .
U

| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДЗЕМНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ | 2002 |
|
RU2233460C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841104A1 |
| СИСТЕМА ТЕЛЕВИЗИОННОГО НАБЛЮДЕНИЯ | 1995 |
|
RU2068625C1 |
| МНОГОКАНАЛЬНОЕ АДАПТИВНОЕ РАДИОПРИЕМНОЕ УСТРОЙСТВО | 2011 |
|
RU2450422C1 |
| Устройство для измерения восприимчивости и частотной избирательности каналов радиоприемника к побочным составляющим несущей частоты | 1982 |
|
SU1104431A1 |
| Устройство для сигнализации | 1989 |
|
SU1742840A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОХОЖДЕНИЯ ОЧИСТНОГО ОБЪЕКТА В ТРУБОПРОВОДЕ | 1992 |
|
RU2030678C1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ РАДИОСТАНЦИЙ | 2003 |
|
RU2250570C2 |
| Устройство для определения положения предметов на палубе судна | 1985 |
|
SU1269161A1 |