(54) УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАНСПОРТНЫХ ПОТОКОВ ЧЕРЕЗ ДОРОЖНЫЕ СООРУЖЕНИЯ
и соответственно первым и вторым входом реверсивного счетчика., выход которого соединен со вторым входом третьего блока вычитания, выходы третьих блока сложения и вычитания соединены соответственно с первым и вторым входами блока управления, первый, второй, третий, . четвертый и пятый выходы которого соединены соответственно -со вторыми входами первото, второго, третьего и четвертого ключей и третьего блока сложения, шестой, седьмой, восьмой и девятый выходы блока управления соединены с третьими входами реверсивного счетчика, третьего блока вычитания, первого и второго блоков памяти, третьи выходы которых соединены соответствено с первым и вторым входом коммутатора, третий вход которого соединен с десятым выходом бло.ка управления, выход коммутатора соединен со входом цифроаналогрвого преобразователя .
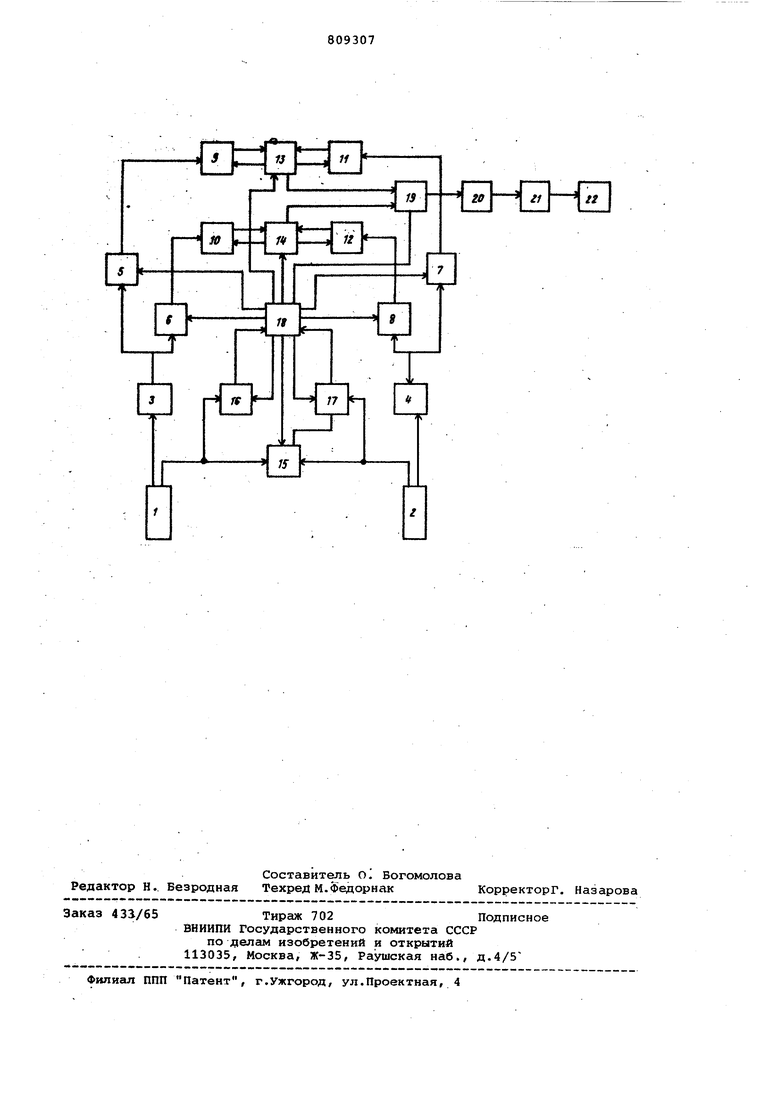
На чертеже представлена блок-схема устройства.
Устройство содержит датчики веса и 2, первый и второй аналого-цифровые преобразователи 3, 4, ключи 5-8, первый и второй блоки сложения 9, 10, блоки пычитания 11, 12, блоки памяти 13 14, реверсииный счетчик 15, трети., блок сложения 16, третий блок вычитания 17, блок управления 18, коммутатор 19, цифроаналоговый преобразователь 20, пороговый блок 21, блок 22 предупредительной и запретно разрешающей сигнализации.
Первый датчик веса 1 устанавливается при въезде на мост, и вес транспортных единиц, въезжающих на мост, суммируется с общим весом автомашин, уже находящихся на мосту. Второй датчик веса 2 устанавливается на выезде с моста и вес транспортных единиц, выезжающих с моста, вычитается из общего веса автомашин, находящихся на мосту. Благодаря этому устраняется неточность в определении суммарного веса при обгоне транспортных единиц на мосту.
Устройство работает следующим образом.
Пусть в первоначальный момент времени блок управления 18 открывает ключи 5 и 7 и информация с датчиков веса 1 и 2, преобразованная в кодовую форму аналого-цифровыми преобразователями 3 и 4, поступает в первый блок памяти 13, причем информация с датчика веса 1 с помощью блока сложения 9 постоянно суммируется, а информация с датчика веса 2 с помощью блока вычитания 11 постоянно вычитается.
С выхода первого блока памяти 13 информация об общем весе транспортны единиц, находящихся на мосту,поступает через коммутатор 19 и цифроаналоговый преобразователь 20 на пороговый блок 21, с выхода которого подается соответствующий сигнал на блок предупредительной и запретноразрешающей сигнализации 22.
Кроме того, с выхода датчика веса 1 на вход сложения реверсивного счетчика 15 поступают единичные сигналы, характеризующие количество въезжающих транспортнь1х единиц, а с выхода датчика веса 2 на вход вычитания реверсивного счетчика 15 поступают единичные сигналы, харак.теризующие количество выезжающих транспортных единиц. Таким образом, реверсивный счетчик регистрирует количество транспортных единиц, находящихся на мосту.
Количество въезжгиощих транспортных единиц регистрируется также блоком сложения 16. Когда это количество достигает величины, при которой накопленная ошибка будет иметь .заданную величину, третий блок сложения 16 выдает сигнал на блок упраления 18, который сбрасывает третий блок сложения 16 и подает команду, по которой ч:исло, находящееся в этот момент в реверсивном счетчике 15, переписывается в третий блок вычитания 17 и включается третий блок вычитания 17, который из записанного числа начинает вычитать количество транспортных единиц, выезжающих с моста.
Одновременно блок управления 18 открывает ключи 6 и 8, и информация датчиков 1 и 2 начинает поступать через второй блок сложения 10 и второй блок вычитания 12 во второ блок памяти 14. Однако при этом продолжается поступление информации и в первый блок памяти 13, с выхода которого информация поступает через коммутатор 19 на блок 20 и т.д.
Когда третий блок вычитания 17 достигает нуля, с его выхода сигнал поступает на вход блока управления 18, который останавливает третий блок вычитания 17, закрывает клчи 5 и 7, переключает коммутатор 19 в другое положение, при котором информация на выход устройства начинает поступать со второго блока памяти 14, и сбрасывает информацию с накопленной ошибкой с первого блока памяти 13.
Когда третий блок сложения 16 опять отсчитает заданное число транспортных единиц, при котором накопленная ошибка вновь достигнет предельно допустимой величины, информация с датчиков веса 1 и 2 снова начинает поступать в первый блок памяти 13, фиксируется с помощью реверсивного счетчика 15 количество транспортных единиц, находящихся на мосту в этот момент времени, и когда третий блок вычитания 17 отсчитает, что это количест во транспортных единиц переместилось с моста, поступление информации во второй блок памяти 14 прекращается, коммутатор 19 подключает к выходу устройства первый блок па мяти 13, а информация с накопленно ошибкой из второго блока памяти 14 стирается. В пороговом блоке 21 устанавливается несколько порогов. Когда нагрузка на мост достигает какоголибо порога, блок 21 вырабатывает соответствующий сигнал, который включает соответствующую сигнализа цию на блоке 22, установленном пер въездом на мост, ограничивающую въ на мост следующих транспортных еди ниц. Структура предлагаемого устройст ва позволяет устранить ошибку в опр делении нагрузки на дорожное сооружение, которая накапливается за сче погрешности показаний взвешивающих механизмов в каждый момент времени Формула изобретения Устройство для формирования тра спортных потоков через дорожные сооружения, содержащее первый датчик веса, соединенный со входом первого аналого-цифрового преобразователя, первый,блок памяти, первый вход и выход которого соединены с первым входом и выходом первого блока еложения, вторые выход и вход первого блока памяти соединены с первым входом и выходом первого блока вычитания, цифроаналоговый преобразователь, выход которого через поро говый блок соединен с блоком предуп дительной и запретно-разрешающей сигнализации, второй блок памяти, отличающееся тем, что, с целью повышения точности устройства в него введены вторые датчик веса и аналого-цифровой преобразова тель, четыре ключа, второй и третий блоки сложения, второй и -третий блоки вычитания, коммутатор, реверсивный счетчик и блок управления, первые вход и выход второго блока памяти соединены с первым входом и выходом второго блока сложения, вторые вход и выход второго блока памяти соединены с первым входом и выходом второго блока вычитания, выход первого и второго аналогоцифровых преобразователей соединены соответственно с первыми входами первого и второго, третьего и четвертого ключей, выходы которых соответственно соединены со вторыми входами первого и второго блоков сложения, и первого и второго блоков вычитания, вторые выходы первого и второго датчиков веса соединены соответственно с первыми входами третьих блока сложения и вычитания и соответственно первым и вторым входом реверсивного счетчика, выход которого соединен со вторым входом третьего блока вычитания, выходы третьих блока сложения и вычитания соединены соответственно с первым и вторым входами блока управления, первый, второй, третий, четвертый и пятый выходы которого соединены соответственно со вторыми входами первого, второго, третьего и четвертого ключей и третьего блока сложения, шестой, седьмой, восьмой и девятый выходы блока управления соединены с третьими входами реверсивного счетчика, третьего блока вычитания, первого и второго блоков памяти, третьи выходы которых.соединены соответственно с первым и вторым входом коммутатора, третий вход которого соединен с десятым выходом блока управления, выход коммутатора соединен со входом цифроаналогового преобразователя. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР 506901, кл. G 07 С 5/02, 1974. 2.Авторское свидетельство СССР по заявке № 2476686/24, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для синусно-косинусного цифроаналогового преобразования | 1983 |
|
SU1278897A1 |
| УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1986 |
|
SU1840555A1 |
| Устройство для исследования электрохимических процессов | 1988 |
|
SU1589187A1 |
| Цифровой вольтметр | 1979 |
|
SU845281A1 |
| Цифровой измеритель магнитной индукции | 1976 |
|
SU879519A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| Нелинейный преобразователь | 1988 |
|
SU1674172A1 |
| Устройство для геоэлектроразведки | 1981 |
|
SU1022104A1 |
| Имитатор телевизионных видеосигналов точечных объектов | 1979 |
|
SU902320A2 |
| Число-импульсный функциональный преобразователь | 1982 |
|
SU1043645A1 |