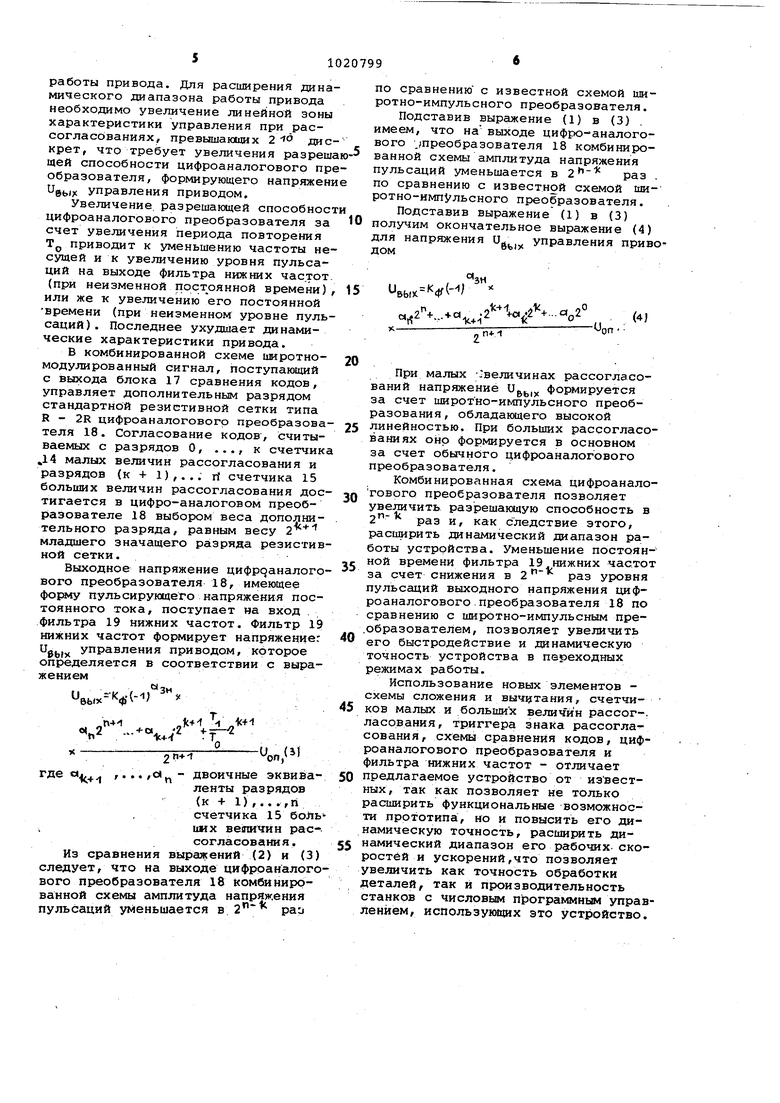
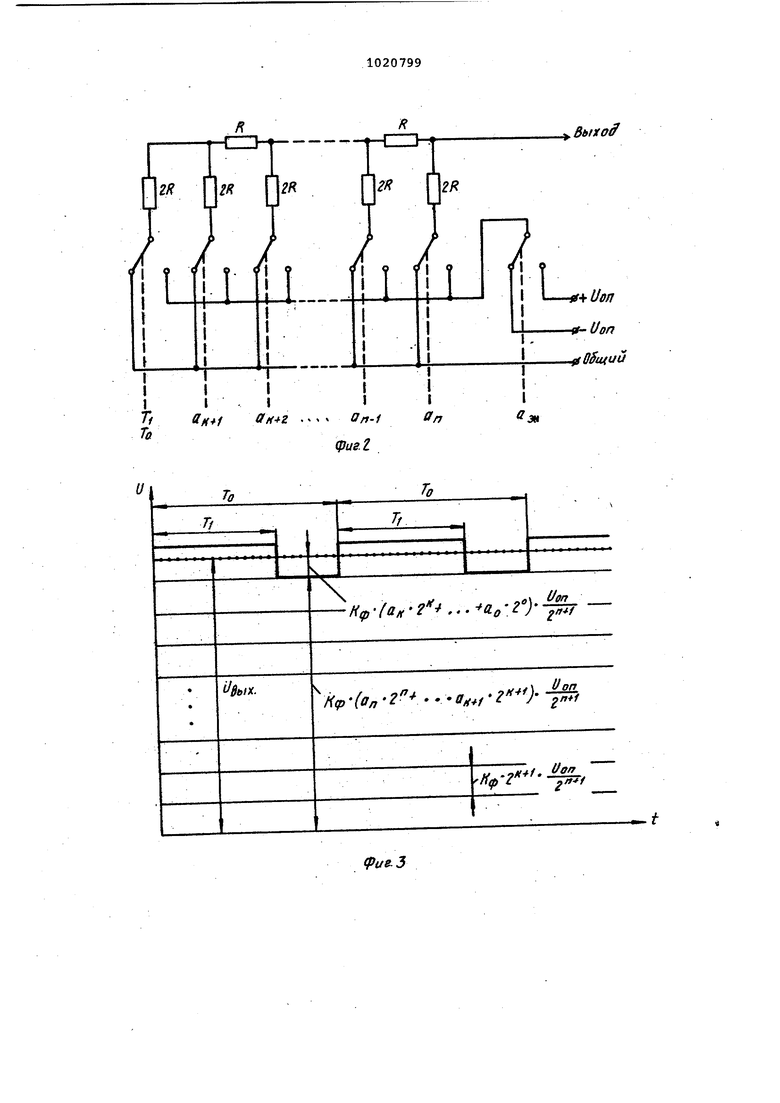
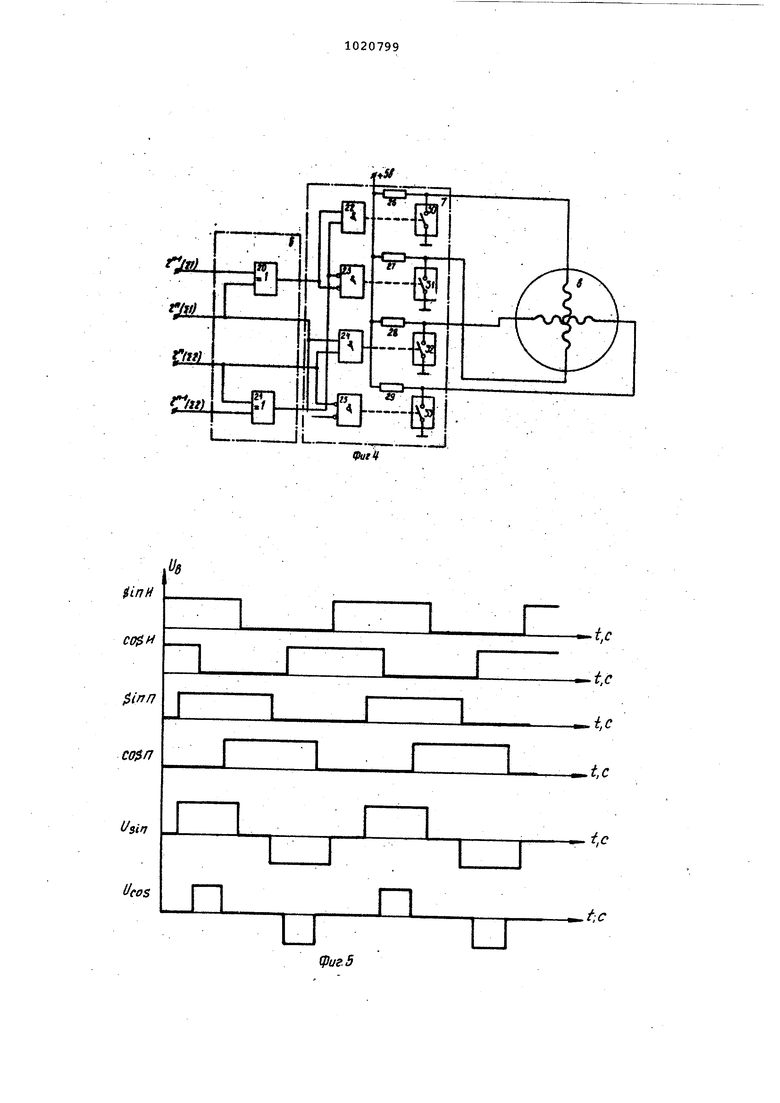
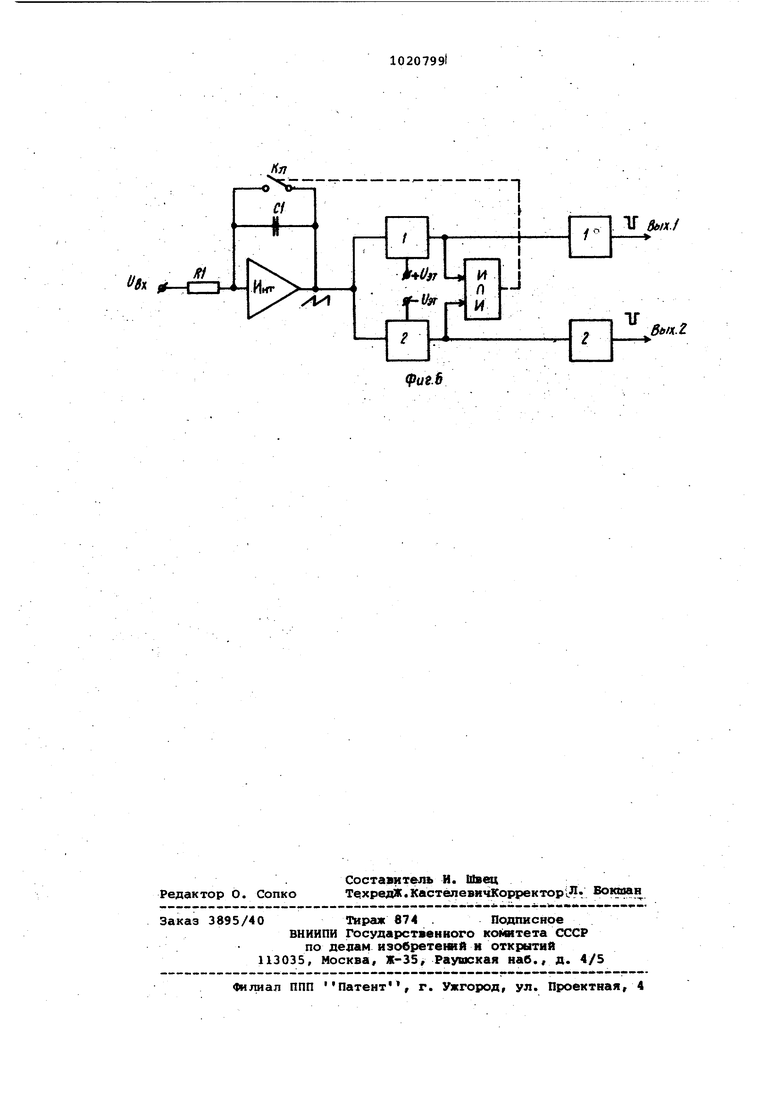
Изобретение относится к автомати ке и вычислительной технике и, в частности к области числового программного управления станками. Известно импульсно-фаэовое устройство , содержащее интерполятор, схему сложения и вычитания, делител напряжения, подключенный к датчику, и последовательно соединенные генератор, опорный делите,ль частоты, фазовый дискриминатор, привод, дат|чик и фильтр нижних частот, выход i которого соединен с одним из входов фазового дискриминатора, интерполятор через схему сложения и вычитания подключен к делителю напряжения .а выход генератора соединен с одним из входов схемы сложения и вычитания Cl 3. Однако такое устройство не отвечает современным требованиям высокой ста тической и динамической точности, предъявляемым к станкам с числовым программным управлением. Известно устройство для преобразования перемещение-фаза, содержащее генератор импульсов, выход кото рого подключен к входу опорного делителя частоты, датчик, выход которого через фильтр подключен к первому входу демодулятора, последовательно соединенные интегратор, прео разователь напряжения в частоту импульсов и реверсивный счетчик, два сулматора, логический блок и блок ключей, вход интегратора соединен с выходом демодулятора, одни входы сумматоров соединены с выходами пря мого кода опорного двигателя, други входы первого сумматора сое1шнены с выходами прямого кода реверсивного счетчика, другие входы второго сумматора - с выходами обратного кода реверсивного счетчика, выходы сумматоров через логический блок подключены к блоку ключей, выходы которого соединены с датчиком, второй вход демодулятора соединен с выходом опорного делителяf2J, Это устройство значительно превосходит по статической точности суадествуюиие.импульсно-фазрвые уст ройства, но для использования в сис темах числового программного управления высокопроизводительными станками нуждается в повышении динакмче кой точности rf расширении динамичес кого диапазона работы. Цель изобретения - увеличение ди намической точности и расширение ди намического диапазона работы устрой :ства для программного управления. Поставленная цель достигается тем, что в известное устройство со держащее последовательно с&единен|ные генератор импульсов, делитель частоты, первый сумматор, логический блок, блок ключей, датчик положения, полосовой фильтр, демодулятор, интегратор, преобразователь напряжение-частота, реверсивный счетчик и второй сумматор, выход которого подключен к второму входу логического блока, а второй вход - к выходу делителя частоты, второй выход реверсив-. ного счетчика соединен с вторым входом первого сумматора, введены соединенные последовательно блок сложения-вычитания, первый счетчик, блок сравнения кодов, цифроаналоговый преобразователь и фильтр нижних частот, выход которого соединен с выходом устройства, а также последовательно соединенные второй счетчик и триггер знака, выходом подключенный к знаковому входу цифроаналогового преобразователя, третий вход которого соединен с вторым выходом Ьторого счетчика , выходы преобразователя напряжение-частота подключены. к первым входам блока сложения-вычитания, вторые входы которого подключены к входам устройства. На фиг. 1 представлена блок-схема широтно-импульсного устройства для программного управления; на фиг . 2 - схема управления разрядными резисторами сетки типа R -2R; на фиг. 3 - временная диаграмма работы комбинированного цифроаналогового преобразователя; на фиг. 4 .- пример функциональной схемы логического блока и блока ключей; на фиг. 5 временные диаграммы работы этих бло;ков; на фиг. б - пример схемы преюбразователя напряжение-частота. Устройство содержит генератор 1 импульсов, опорный делитель 2 частог ты, nepBbift и второй сумматоры 3 и 4, реверсивный счетчик 5, логический блок 6, блок 7 ключей, датчик 8 положения , полосовой фильтр 9, демодулятор 10, интегратор 11, преобразователь 12 напряжение-частота, блок 13 сложения и вычитания, первый счетчик 14, счетчик малых величин рассогласования, второй счетчик 15, счетчик больших величин рассогласования, триггер 16 знака рассогласования, блок 17 сравнения кодовj цифроаналоговый преобразователь 18 и фильтр 19 нижних частот. Блок б состоит из схем ИСКЛЮЧАЮЩЕЕ ИЛИ 20-21,а блок 7-из элементов И 22- 25, резисторов 26-29 и ключей 30-33. Устройство работает следуйяцим образом. Импульсы тактовой частоты от генератора 1 импульсов поступают на 9ХОД опорного делителя 2 частоты и заполняют его. На входы первого сумматора 3 информация от ;,опорного делителя 2 и реверсивного счетчика 5 поступает в прямых кодах. На входы второго сумматора 4 информация от опорного делителя 2 поступает в пр мом коде, а от реверсивного счетчи ка 5 - в обратном. Модулированные по фазе прямоугольные импульсы с выходов первого и вторго сумматоро 3 и 4 через логический блок 6 пост пают на блок 7 ключей. Величина фа вого сдвига .прямоугольных импульсо относительно выходных сигналов опо ного делителя 2 частоты определяют ся содержимым реверсивного счетчика 5, Блок 7 ключей формирует две последовательности чередующихся ра нополярных широтно-модулированных прямоугольных импульсов, которые поступают на входные обмотки датчи ка 8. положения. Выходы двух старших разрядов су маторов 3. и 4 поступают на входы логического блока 6. На выходах ло гического блока 6 формируются прямоугольные импульсы 5п И, cos И, Sitin и cos п, приведенные на временных диаграммах (фиг. 5). С выходов логического блока.б сигналы поступают на блок 7 ключей. Первый выход опорного делителя по которому в параллельном коде пос тупает содержимое делителя 2, обеспечивает формирование чередукяцихся разнополярных широтно-модулированны прямоугольных сигналов на клеммах входных обмоток датчика 8 положения Второй выход опорного делителя 2 (соединение 11) служит для управления демодулятором 10, По этому выхо ду на вход демодулятора 10 поступае прямоугольный переключающий сигнал со скважностью 2. Третий выход делителя 2 служит для передачи- изменяющегося во време ни по пилообразному закону кода содержимого опорного делителя 2 на вход блока 17 сравнения кодов опорного делителя 2 и счетчика 14 малых величин рассогласования, с целью формирования на выходе.блока 14 широтно-модулированного сигнала, поступающего на вход цифроаналогового преобразователя 18. Выходной- сигнал с датчика 8 положения через полосовой фильтр 9 поступает на демодулятор 10. На выходе демодулятораЮ формируется напряжение ошибки преобразования перемещение -код, поступающее на вход интегратора 11. Выходное напряжение интегратора 11 подается на вход преобразователя 12 напряжениечастота, на одном выходе которого формируется последовательность импульсов при положительной полярности входного сигнала, а на другом при отрицательной полярности этого сигнала. Последовательность импульсов, сформированная преобразователем 12 напряжение-частота, поступает на один из входов реверсивного -счетчика 5, вследствие чего содержимоё этого счетчика всегда является двоичньлм эквивалентом перемещения подвижной части датчика 8 положения. Одновременно последовательность импульсов с выхода преобразователя 12напряжение - частота поступает на один из входов блока 13 сложения и вычитания. На другие входы блока 13подаются импульсы задания от внешнего интерполятора. Результирующая последовательность импульсов с выхода блока 13 поступает на один из входов счетчика 14 малых величин рассогласования, заполняя его.Код с разрядов О,... к с.четчика 14 малых величин рассогласований поступает на входы блока 17 сравнения кодов, на другие входы к.оторой подается информация с опорного делителя 2 частоты. На выходе блока 17 сравнения кодов формируется широтно-импульсный сигнал, скважность котррого определяется выражением + ...-hV где Т.., - длительность формируемого , импульса; TQ - период повторения импуль- , а , ... эквиваленты разрядов О, ..., к счетчика 14 малых величин рассогласования. Схема построения цифроаналогового преобразователя на базе широтно-импульсного модулятора, ключа, комму-., тирующего двуполярное опорное напряжение и фильтра нижних частот реализует зависимость 6ЫИ напряжение управления приводом ; коэффициент передачи фильтра 19 нижних частоту; двоичный эквивалент знакового разряда триггера 16 знака рассогласования; опорное напряжение. Такое построение схемы дает высокую линейность, однако ее разрешающая способность 1/2 как правило не превьииает . В переходных реясимах работы при больших ускорениях и ограниченной добротности привода рассогласование по положению может достигать величин, больших 2 дискрет. Применение в таких случаях нелинейной характеристики управления типа насьвцение при рассогласованиях, превышающих дискрет, ограничивает динамический диапазон работы привода. Для расширения дина мического диапазона работы привода необходимо увеличение линейной зоны характеристики управления при рассогласованиях, превышакиих дис крет, что требует увеличения разреша щей способности цифроаналогового пр образователя, формирующего напряжени выx управления приводом. Увеличение разрешающей способнос цифроаналогового преобразователя за счет увеличения периода повторения Тр приводит к уменьшению частоты несущей и к увеличению уровня пульсаций на выходе фильтра нижних частот (при неизменной пост оянной времени) или же к увеличению его постоянной времени (при неизменном уровне пульсаций) . Последнее ухудшает динамические характеристики привода. В комбинированной схеме ииротномодулированный сигнал, поступающий с выхода блока 17 сравнения кодов, управляет дополнительным разрядом стандартной резистивной сетки типа R - 2R цифроаналоговогр преобразователя 18. Согласование кодов , считываемых с разрядов О, ..., к счетчика .14 малых величин рассогласования и разрядов (к + 1),... rt счетчика 15 больимх величин рассогласования достигается в цифро-аналоговом преобразователе 18 выбором веса дополнительного разряда, равным весу 2 младшего значащего разряда резистивной сетки. Выходное напряжение цифр9аналогового преобразователя 18, имеющее форму пульсирующего напряжения постоянного тока, поступает на вход фильтра 19 нижних частот. Фильтр 19 нижних частот формирует напряжение: Ug.. управления приводом, которое определяется в соответствии с выражениемвых-М- где «4/4-1 двоичные эквиваленты разрядов (к + 1) ,.. . ,ri счетчика 15 боль ших величин рассогласоваш1я. Из сравнения вь1ражений (2) и (3) следует, что на выходе цифроаналого вого преобразователя 18 комбинированной схемы амплитуда напряжения пульсаций уменьшается в 2 по сравнению с известной схемой широтно-импульсного преобразователя. Подставив выражение (1) в (3) . имеем, что на выходе цифро-аналогового .преобразователя 18 комбинированной схемы амплитуда напряжения пульсаций уменьшается в раз по сравнению с известной схемой широтно-импульсного преобразователя. Подставив выражение (1) в (3) получим окончательное выражение (4) для напряжения U., управления приводом « «/ -«о2° W..a,,-2 При малых -.величинах рассогласований напряжение и,, формируется за счет широтно-иг/шульсного преобразования, обладакидего высокой линейностью. При больших рассогласованиях оно формируется в основном за счет обычного цифроаналогового преобразователя. Комбинированная схема цифроаналогового преобразователя позволяет увеличить разрешающую способность в 2 раз и, как с ледствие этого, расимрить динамический диапазон работы устройства. Уменьшение постоянной времени фильтра 19 нижних частот за счет снижения в 2 раз уровня пульсаций выходного напряжения цифроаналогового преобразователя 1В по сравнению с широтно-импульсным пре.образователем, позволяет увеличить его быстродействие и динамическую точность устройства в переходных режимах работы. Использование новых элементов схемы сложения и вычитания, счетчи- ков малых и больвшх величин рассог-. ласования, триггера знака рассогла сования, схемы сравнения кодов, цифроаналогового преобразователя и фильтра нижних частот - отличает предлагаемое устройство от известных, так как позволяет не только расширить функциональные возможности прототипа, но и повысить его динамическую точность, расширить динамический диапазон его рабочих скоростей и ускорений,что позволяет увеличить как точность обработки деталей, так и производительность станков с числовым программным управлением, использующих это устройство.
fpue.3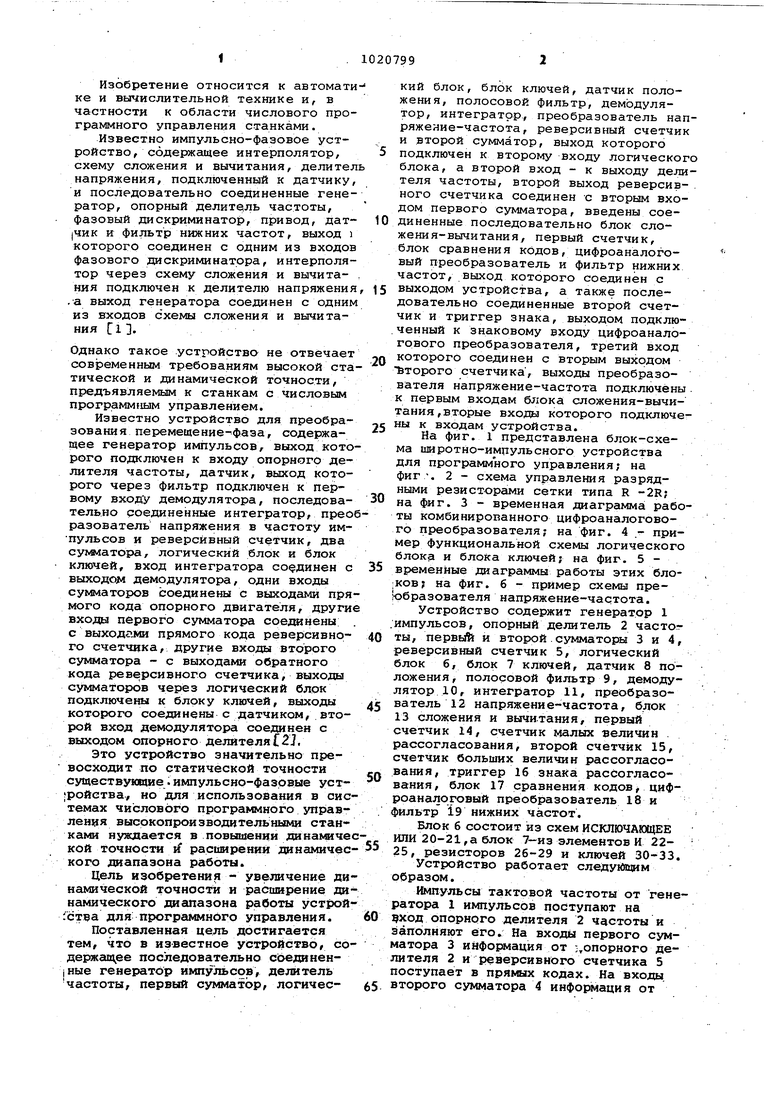

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления приводом | 1984 |
|
SU1226410A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1020845A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1531221A1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР СО СЛЕДЯЩИМ УРАВНОВЕШИВАНИЕМ | 1985 |
|
SU1318069A1 |
| Цифровой следящий привод | 1978 |
|
SU734607A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Устройство для управления и стабилизации параметров выходного напряжения преобразователя | 1984 |
|
SU1274094A1 |
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1985 |
|
SU1269265A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1451861A1 |
ШИРОТНО-ИМПУЛЬСНОЕ УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРИВОДСЖ, содержащее последовательно соединенные генератор импульсов, делитель частоты, первый суюлатор, логический блок, блок ключей, датчик положения, полосовой фильтр, демодулятор, интегратор, преобразователь напряжение-частота, реверсивный счетчик и второй сумматор, выход которого подключен к второму входу логического блока, а второй вход - к выходу делителя частоты, второй выход реверсивного счетчика соединен с вторым входом.первого сумматора, о т л и ч а ющ е е с я тем, что, с целью повыаения динамической точности и расширения динамического диапазона работы устройства, в него введены последовательно соединенные блок сложеная-вычитания, первый счетчик, блок сравнения кодов, цифроаналоговый преобразователь и фильтр нижних частот, выход которого соединен с выходом устройства, а также последовательно соединенные второй счетчик и триггер знака, выходом подключенный к знаковому входу цифроаналогового преобразователя, третий вход которого соединен с вторым выходом второго счетчика, выходы преобра 3оЪателя напряжение-частота подключены к перв.ым входам блока еложения-вычитания, вторые входы которого подключены к входам устройства. О Ю 0 со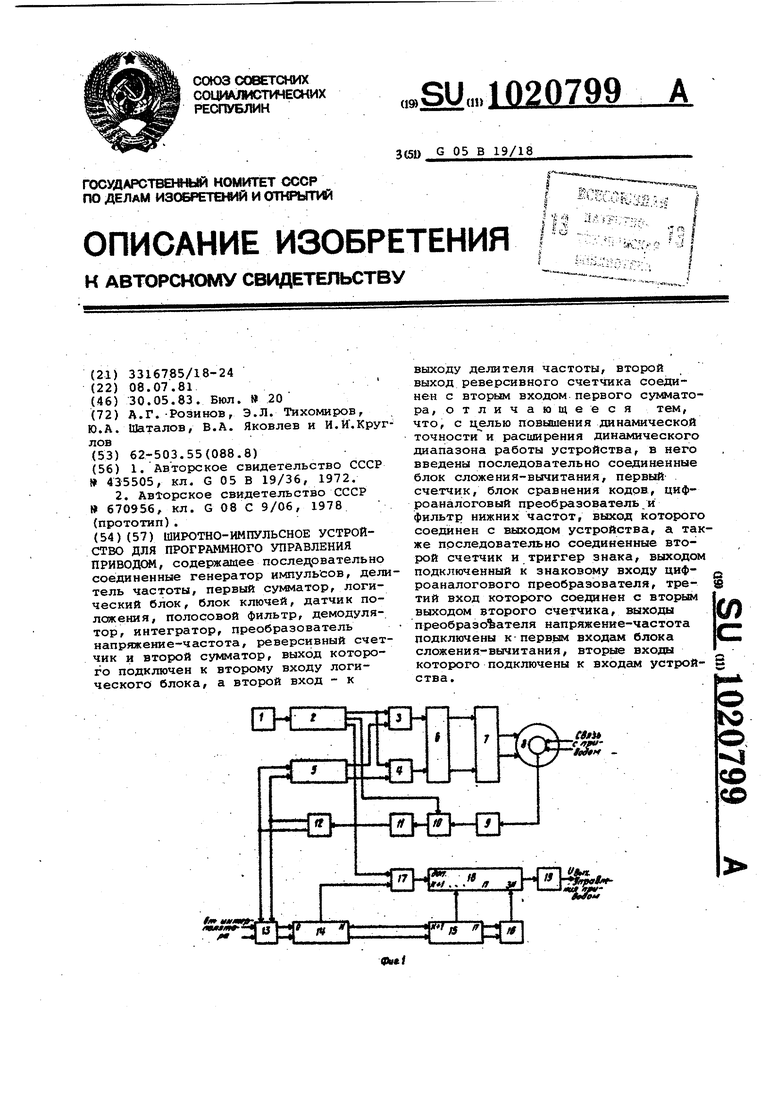
п
.f.c
.t.c
i,c
.t.c
,c
.t:c
% Bfix./ бьп.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ИМПУЛЬСНО-ФАЗОВОЕ УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯВ ПТ Бе'тг?"Р4j,i>&;ljil.l | 1973 |
|
SU435505A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для преобразования "перемещение-код-фаза" | 1977 |
|
SU670956A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
