. Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления.
Известно устройство синусно-ко- синусного преобразования с заданием узловых точек аппроксимации с помощью ряда опорных напряжений и с аппроксимацией функций синуса и косинуса между узловыми точками путем линейной амплитудной модуляции опорных напряжений цифровыми сигналами, сформированными из сигнала задания, содержащее блок задания узловых точек аппроксимации, входной счетчик, селектор квадрантов, селектор точек аппроксимации, дешифраторы, линейные резистивные сетки, выходной фазоинвертор lj .
Наиболее близким к изобретению по технической сущности является устройство синусио-косинусного преобразования, основанное на преобразовании опорных напряжений по законам аппроксимирукнцих функций
КСУ)
- к(У)
где
K(Jf),
к(у)
(in) W+K(y) (cos) у+КЛ(у)
W 1,80148;
(f - угол задания в текущем квадранте датчика;
(1)
и первый цифроаналоговый преобраз ватель, аналоговы 5 вход которого соединен с шиной первого опорного напряжения,, а выход - с первым вх дом первого сумматора, и генерато косинусной функции, соде ржащий вт JQ рой фазоинвертор, второй сумматор второй цифроаналоговый преобразов тель, аналоговьй азход которого Со динен с шиной второго опорного на жения, а выход - с первым входом
- линейные положительные функ- 35 сумматора, выходы первого и
второго фазоинверторо в являются в ходами устройства., содержит блок постоянной памяти., блок выборки, вый и второй реверсивные счетчики блок реверса счета, третий и четв тый цифроаналоговые преобразовате при этом вход устройства соединен первым информационным входом блок реверса счета, первый и второй вы которого соединены с входами упра
ции, дополняющие друг друга до единицы.
Известное устройство содержит селектор, квадрантов, генератор синуса, в состав которого входит первый фазоинвертор и первый цифроаналоговый преобразователь, связанный выходом с первым входом первого сумматора, и генератор косинуса, в состав которог входит второй фазоинвертор и второй цифроаналоговый преобразователь, связанный выходом с первым входом второго cyjtfl aTopa 2 .
Недостатком известных устройств является .ограниченность возможностей прц выборе дискретности аргумента и соответственно при выборе числа дискрет деления шага индукционного датчика (периода синусной и косинусной функции), что исключает возможность перенастройки схемы устройства на различные дискретности задания входного угла.
JO
15
1)
Кроме того, недостатком является отсутствие возможности учета внутри- шаговой погрешности датчика при преобразовании, т.е. отсутствие возможности имитации сигналов реального индукционного датчика типа индук- тосин или вращающийся трансформатор, например, ,цля целей компенсации по- грешнос тей датчиков в следящих системах .
Цель изобретения - расширение области применения за счет преобразования с различной дискретностью задания и расширение класса решаемых задач за счет имитации сигналов реальных датчиков.
Поставленная цель достигается тем, что .устройство для синусно-косинус- ного цифроаналогового преобразования, содержащее селектор квадрантов, генератор синусной функции, содержащий первый фазоинвертор, первый сумматор
и первый цифроаналоговый преобразователь, аналоговы 5 вход которого соединен с шиной первого опорного напряжения,, а выход - с первым входом первого сумматора, и генератор косинусной функции, соде ржащий вто- JQ рой фазоинвертор, второй сумматор и второй цифроаналоговый преобразователь, аналоговьй азход которого Соединен с шиной второго опорного напряжения, а выход - с первым входом вто20
25
35 сумматора, выходы первого и
40
45
второго фазоинверторо в являются выходами устройства., содержит блок постоянной памяти., блок выборки, первый и второй реверсивные счетчики, блок реверса счета, третий и четвертый цифроаналоговые преобразователи, при этом вход устройства соединен с первым информационным входом блока реверса счета, первый и второй выходы которого соединены с входами управления реверсом соответственно первого
I
и второго реверсивных счетчиков, а
третий выход блока реверса счета- - со счетным входом первого и второго
/;Q реверсивных; счетчиков, выходы отрицательного переноса которЕ 1х соединены соответственно с вторым и третьим информационными входами блока реверса счета, четвертой выход которого
соединен с входом селектора квадрантов и с информацконным входом блока выборки, а пятый выход - с управляющим входом блока выборки, выход которого соединен с входом блока пос312
тоянной памяти, выход которого соединен G кодовыми входами первого и второго реверсивных счетчиков, кодо- вьй выход первого реверсивного счетчика соединен с кодовыми входами первого и четвертого цифроаналоговых преобразователей, кодовый выход второго реверсивного счетчика соединен с кодовыми входами второго и треть
его цифроаналоговых преобразователей, Ш лагаемого устройства; на фиг. 2
выход третьего и четвертого цифро- аналоговых преобразователей соедине с вторыми входами соответственно первого и второго сумматоров, выход первого сумматора соединен с аналоговым входом третьего цифроаналого- вого преобразователя и с информационым входом первого фазоинвертора, выход второго сумматора соединен с аналоговым входом четвертого цифро- аналогового преобразователя и с информационным входом второго фазоинвертора, первьй информационный выхо селектора квадрантов соединен с входом определения направления счета блока реверса счета, второй и трети информационный выходы селектора квадрантов соединены со знаковыми входами соответственно первого и второго фазоинверторов, а также тем что блок реверса счета содержит коммутатор, первый и второй RS-триггер формирователь импульсных последовательностей, первый, второй, третий и четвертый элементы ИЛИ и формиров тель ш пульсов, первый и второй выхды которого являются первым и вторым управляющими выходами блока, а третий и четвертый выходы соединены с первыми входами первого и второго элементов ИЛИ, выход которых подключены к третьему выходу блока, первый и второй входы третьего элемента ИЛИ соединены с S-входами первого и второго RS-триггеров и являются вторым и третьим информационными входами блока, выход третьего элемента ИЛИ соединен с управляющим входом формирователя -импульсных по- следовательностей, информационный вход которого соединен с информационым входом коммутатйгра и является первым информационным входом блока, выход формирователя импульсных по
следовательностей является четвертым 55ном, геометрической неортогональнос- выходом блока, прямые выходы RS-триг-тью синусных и косинусных обмоток геров соединены с соответствующимидатчика и проявляется в эле1(тричес- входами формирователя импульсов, акой асимметрии синусного и косинус- инверсные выходы - с соответствую-ного сигналов.
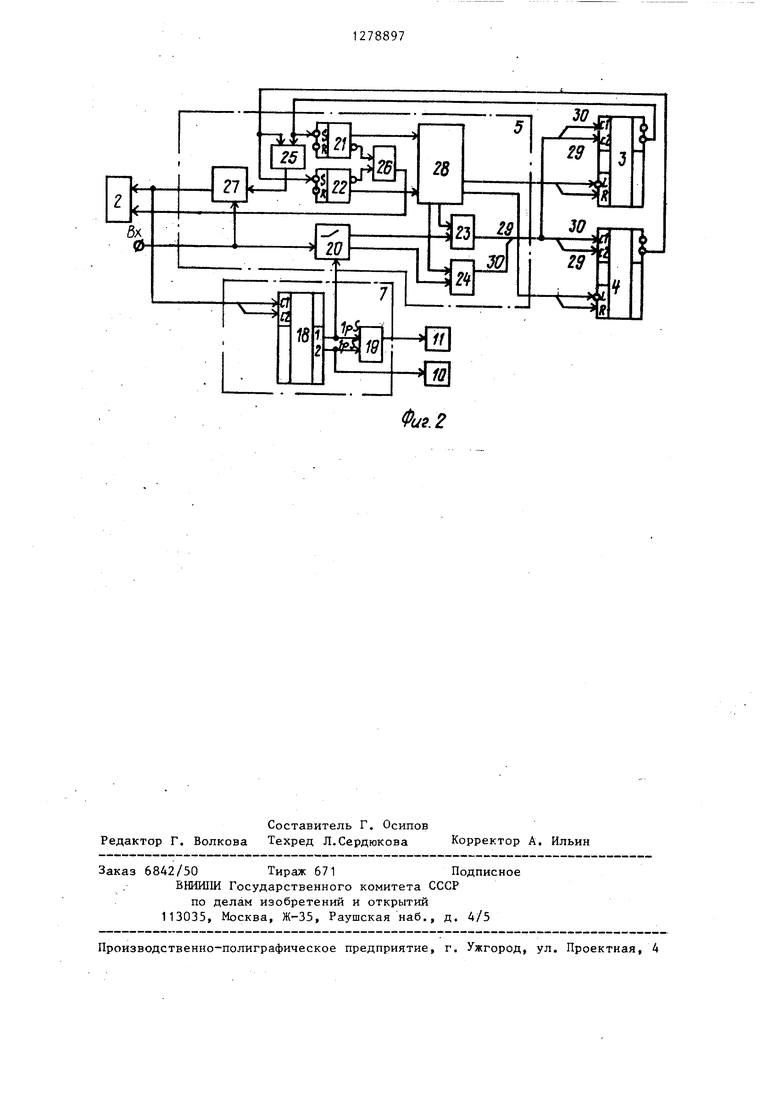
щими входами четвертого элемента ИЛИ, выход которого является пятым выходом блока, первый и второй выходы коммутатора соединены с вторыми входами соответственно первого и второго элементов ИЛИ, управляющий вход KOMbiyTaTopa является входом определения направления счета блока. На фиг. 1 представлена схема пред
образом,
схема блока реверса счета и селектора квадрантов.
Устройство содержит блок 1 пос-; тоянной памяти, блок 2 выборки, реверсивные счетчики (PC) 3 и 4,
образом,
блок 5 реверса счета, вход 6, селектор 7 квадрантов, генератор 8 синусной функции, генератор 9 косинусной функции, фазоинверторы 10 и. 11, цифроаналоговые преобразователи (ЦАП) 12-15, сумматоры 16 и 17, селектор 7 квадрантов содержит реверсивный счетчик 18 и элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 19.
Блок 5 реверса счёта содержит коммутатора 20, RS-триггеры 21 и 22, элементы ИЛИ 23-26, формирователь 27 импульсных последовательностей, формирователь 28 импульсов, выходы положительной 29 и отри- .цательной 30 импульсных последовательностей, образующие первый информационный выход блока 5.
Устройство работает следующим
образом,
Выходные сигналы идеального индукционного датчика, имеющие вид
35 образом,
40
Uj и соS к;- S in О t;
ом,
sinei- sincot.
образом,
на практике реализуются с ошибками. Основная причина этого явления - внутрипериодная.(внутришаговая) погрешность датчика. Это в основном технологическая погрешность. Ее главные составные части могут быть аппроксимированы с помощью гармонических функций вида siri Koi и cos Каб, где ,2,4. Наибольший удельный вес среди них имеет первая гармоника. Она обусловлена, в основ51278897
, Эту погрешность можно воспроизвести и тем самым скомпенсировать с
помощью предлагаемого устройства. :Это обеспечивается следующим образом
Опорные напряжения U, и Ug мо дулируются в каналах синуса и.косинуса первым N(y) и вторым ) цифровыми модулирующими сигналами соответственно. Эти сигналы изменяются по законам линейной аппроксимации функций /sinci/ и /cosoi/ соответственно.
Сигналы N(j) и Н(у) формируются из входной последовательности счетных импульсов 1 N(oi), в которой каждый импульс соответствует элементарному углу задания
k6i.
27
N
ill
Для реального датчика, имеющего внутришаговую погрешность, угол / связан
:
.
с Я- следующими зависимостями ,7 . (
.8 -об i
У «L -7 - 8 Y 2 h-об
, г, . 3 1V)(« fA
н о об 6 - II + о , 5 /
l-ira ot S.
Таким образом, угол у - пересчитанный к квадрантам датчика угла oi 8 fi - составляющие погрешности в точках н /2, IT , . (об - угол поворота вектора задания в декартовой системе координат, у - угол поворота вектора в системе координат, образованной электрическими полуосями датчика; они повернуты относительно декартовых осей и обра- зуют квадранты датчика, которые не .совпадают с декартовьми квадрантами)
Если обозначить через д максимальное значение угла У в квадранте S, то для каждого квадранта, начи- ная с первого, эта величина равняет
Уа У, Ь
, Г
2 + °
it г -S ;
V (Ч
2
# р((
- о
.««X
Величина у является начальным условием квадранта S для выбранного датчика и выражается в угловых единицах измерения.
Если в качестве единицы измерения использовать элементарный угол
задания л об , вует число
то углу у соответстN.
лог.
(3)
При этом числовые значения модулирующих сигналов определяются из следующих выражений:
Уз-У йГ
(ot)
Таким образом, хщфровые сигналы К(у) и N(y) меняются по законам линейных функций. Они представляют собой двоичные коды разрядности п и формируются путем суммирования счетных импульсов iN(ou) от нуля до величины Ng и путем вычитания - от величины N, до нуля в каждом квад
ранте датчика. При этом один сигнал всегда возрастает, а другой - убывает. При смене квадранта направления задания угла ct характер изменения модулирующих сигналов меняется на противоположныйi
Сигналы N (oi) и N(y), как уже отмечалось, используются в генераторах синуса и косинуса для линейной модуляции опорных напряжений UQ, , Ugj и формируемых сигналов, которые используются также в качестве сигналов положительных обратных связей. Линейная модуляция этих сигналов, например модуляция опорного напряжения UQ сигналом N(y) в канале синуса осуществляется по следующему закону:
и„ -;
Ш.
2
или
(4)
G(slnl ио- 5-Кф 5)
де U
QCein)
сигнал, полученный в результате модуляции напряжения U цифровым модулирующим сиг на- лом Nty);
К -А масштабный коэффициент
линейной модуляции. Задавая величины сигналов Ng, ко- торые являются сигнгшами начальных условий датчика, меняем поквадратно амплитуды сигналов, получаемых в результате линейной модуляции. Сигналы Ng предварительно формируются, исходя из дискретности задания Aci и величин внутришаговых погрешностей
датчика и
5
на сигнала NC
и запоминаются. Величу ig равняется числу дискрет деления квадранта S датчика. Позтому для числа N, справедливо следующее равенство:
,,+N4, Максимальная величина сигнала
N
5 макс
2
П-1
используется для выбора разрядности кодов N(y), N(y), Ng.
Величина N и, следовательно, число дискрет деления квадранта датчика меняется от квадранта к квадранту, не превьппая значения . Этим обеспечивается решение задачи имитации сигналов реального индукционного датчика и, соответственно, решение задачи по компенсации составляющей внутришаговой погрешности датчика. Кроме того, сохраняя разрядность аппаратных средств преобразования, можно переходить на другую дискретность задания ioi , т.е. менять число Ny и его слагаемые N. Благодаря это му можно строить унифицированные пре обра1ователи, т.е. использовать один и тот же преобразователь в различных системах, отличающихся друг от друга дискретностью задания. При переходе от одной дискретности задания к другой формируются и запоминаются новые сигналы начальных условий N., а также в масштабном козффициенте суммирования меняется коэффициент Kg
Формирование сигналов синуса и косинуса осуществляется с помощью линейной амплитудной модуляции опорных напряжений и сигналов положительных обратных связей с последующим суммированием с масштабным коэффици1
ентом -jT-/.., сигналов, полученных в результате этих модуляций. Масштабный коэффициент линейной модуляции Kg в масштабном коэффициенте суммирования учитывает изменения амплитуд сигналов, получаемых в результате модуляции, и слуткит для сохранения неизменным общего коэффициента передачи.
Формирование функций синуса и косинуса в пределах всего периода со1
5
0
сменой полярности сиг- G(5in1 И UQ.g, Б зависипровождаетсяналов и,
J -Э I I 1 /
мости от номера квадранта.
На вход устройства поступает тактированная последовательность счетных импульсов N(ot), один импульс которой соответствует дискрету задания. В зависимости от знака задания импульсная последовательность поступа-. ет на положительный или отрицательный вход блока 5 реверса счета (на чертеже входы функционально объеди-- нены в один информационньй вход).
Счетные импульсы здесь тоже коммутируются в зависимости от значения младшего разряда кода номера S текущего квадранта датчика и подаются на счетные входь PC 3 и 4, в которых последовательный код преобразуется в два п-разрядных параллельных кода: в Прямой код N(y) в PC 3 и в дополняющий его до кода Ng код N(y) в PC 4; При этом
25
N(y) + NA(J ).
35
40
50
Реверсивные счетчики 3 и 4 считают импульсы синхронно, но всегда в 30 противоположных направлениях. Реверс счетчиков осуществляется в блоке 5 реверса счета при смене знака задания c(i или при смене номера квадранта, код которого формируется в селекторе 7 квадрантов. Текущее значение угла 0 в пределах одного квадранта хранится в виде кодов N() и N(J) в РЗС 4. При этом сигнал t pS с первого выхода селектора 7 квадрантов используется в блоке ;5 для определения направления счета реверсивных счетчиков 3 и 4. Кроме того, в селекторе 7 квадрантов осуществляется дешифрация кода 2pS, IpS и на
45 втором выходе формируются сигналы управления фазоинверторами 10 ij 11. Номер квадранта меняется в селекторе 7 квадрантов- по импульсам отрицательного переноса Р2, которые поступают через блок 5 с первых выходов PC 3 и 4, Таким образом, импульс Р2 является сигналом смены квадранта. Он формируется в PC, работающем на вычитание при переходе от кода 00
55 ... 00 к коду 11... 11. По сигналу Р2 блоком 5 производят следующие операции: реверс счетчиков 7 и 4; установка в нуль PC, который сформировал импульс Р2 (в новом квадранte PC работает на сложение); запись начальных условий N нового квадранта в другой PC, который работает на вычитание; формирование и подача на счетные входы PC 3 и 4 дополнительного импульса, компенсирующего потерю счетного импульса, вызвавшего импульс переноса Р2. После этого импульса в одном счетчике записано число 1 (одна дискрета), а в другом - (Ng-1).Начальные условия Ng заносятся в PC 3 и 4 из блока 1 с помощью блока 2 выборки, который управляется сигналами из блока 5 реверса счета. Сюда поступает команда выборки, которая формируется в блоке 5, а также импульсы Р2. Блок 2 выборки содержит свой PC квадрантов, где хранится номер текущего квадранта S датчика (абсолютный номер, отсчет от первого шага датчика). Этот йомер является адресом ячейки ПЗУ 1, хранящий начальные условия Ng данного к дран- та. Для датчика 6 одной парой полюсов в ПЗУ хранятся четыре числа, а для датчика с несколькими парами полюсов - соответственно больше. Например, для- имитации сигналов реального индукционного датчика типа индук- тосин с числом пар полюсов 180 в ПЗУ необходимо записать 720 чисел.
Двоичные коды N()r) и N(j) с вторых выходов PC 3 и 4 подаются на цифровые входы ЦАП 12-15. В ЦАП 12 и 13 осуществляется модуляция опорных напряжений U, , Ug , а в ЦАП 14 и 15 - сигналов U, и U , которые формируются в сумматорах 16 и 17 соответственно. Каждый ЦАП в данном устройстве построен на основе резистивной сетки типа R-2R с ключами и операционного усилителя.
При подаче на аналоговые входы ЦАП 12 и 13 синусоидального опорного напряжения
о «1 5in cot
С выходов синусно-косинусных преобразователей снимаются два напряжения, модулированные по законам, аппроксимирующим функции синуса и косинуса
и
&ЫХ t т
iU sin oi. sinco t;
быц 0/ .sinut.
Рассмотрим несколько примеров выбора параметров преобразования Ng и Kg для преобразователя разрядностью (N„3 1023) в зависимости от значений исходных данных N и (об) .
Пример S(o6)0.
Выбираем ,;,N,.
1. Дано: ,j,j..
Тогда
1.
Пример (oi)0.
2. Дано: N,,
Тогда ,
К,
Пример 3. Дано: , S -18% ,5.
Учитывая выражения (2) и (3), получаем N,650, , N,475, . ,, „
Приме
Пример Д. Дано: , ,36°, ,18% ,54°. N,1004, , N,996, . 1004 .. 994 .. 9qfi
Таким образом, предлагаемое устройство обеспечивает возможность построения унифицированных преобразователей, работающих в системах с различной дискретностью задания, и
возможность имитации (с учетом внут- ришаговой погрешности) сигналов реального индукционного датчика.
Это определяет технико-экономический эффект от использования изобретения.
Формула изобретения
1. Устройство для синусно-косинус- ного цифроаналогового преобразования, содержащее селектор квадрантов, генератор синусной функции, содержащий первый фазоинвертор, первый сумматор и первый цифроаналоговый преобразо- ватель, аналоговый вход которого соединен с шиной первого опорного напряжения, а выход - с первым входом первого сумматора, и генератор косинусной функции, содержащий второй фазоинвертор, второй сумматор и второй iцифроаналоговый преобразователь, аналоговый вход которого соединен с шиной второго опорного напряжения, а выход - с первым входом второго сум- ма.тора, выходы первого и второго фазоинверторов являются выходами устройства, отличающе е с я тем, что, с целью расширения области применения за счет преобразования с различной дискретностью задания и расширения класса решаемых задач за счет имитации сигналов реальных датчиков, оно содержит блок постоянной памяти, блок выборки, первый и второй реверсивный счетчики, блок реверса счета, третий и четвертый цифро- аналоговые преобразователи, при этом .вход устройства соединен с первым информационным входом блока реверса счета, первый и второй выходы которого соединены с входами управления реверсом соответственно первого и . второго реверсивных счетчиков, а третий выход блока реверса счета - со счетным входом первого и второго реверсивных счетчиков, выходы отрицательного переноса которых соединены соответственно с вторым и третьим информационными входами блока реверса счета, четвертый выход которого соединен с входом селектора квадрантов и с информационным входом блока выборки, а пятый выход - с управляющим входом блока выборки, выход которого соединен с входом блока постоянной памяти, выход которого соединен с кодовыми входами первого и второго реверсивных счетчиков, кодовый выход первого реверсивного счетчика соединен с кодовыми входами первого и четвертого цифроаналоговых преобразователей, кодовый выход второго реверсивного счетчика соединен с кодовыми входами второго и третьего цифроаналоговых преобразователей, выходы третьего и четвертого цифро- аналоговых преобразователей соединены с вторыми входами соответственно первого и второго сумматоров, выход первого сумматора соединен с аналоговым входом третьего цифроаналогового преобразователя и с информационным
входом первого фазоинвертора, выход второго сумматора соединен с аналоговым входом четвертого цифроаналогового преобразователя и с информационным входом второго фазоинвертора, первый информационный выход селектора квадрантов соединен с входом определения направления счета блока реверса счета, второй и третий-информационные выходы селектора квадрантов соединены со знаковыми входами соответственно первого и второго фазоинверторов.
2. Устройство по П.1, отличающееся тем, что, блок реверса счета содержит коммутатор, первый и второй RS-триггеры, формирователь импульсных последовательностей, первый, второй, третий и четвертый элементы ИЛИ и формирователь импульсов, первый и второй выходы которого являются первым и вто- рым выходами блока, а третий и четвертый выходы соединены с первыми входами первого и второго элементов ИЛИ, выходы которых подключены к третьему выходу блока, первый и второй входы третьего элемента ИЛИ соединены с S-входами первого и второго RS-триггеров и являются вторым и третьим информационными входами блока, выход третьего элемента ИЛИ соединён с управляющим входом форми-
рователя импульсных последовательностей, информационный вход которого соединен с информационным входом коммутатора и является первым информационным входом блока, выход формирователя импульсных последовательностей является четвертым выходом блока, прямые выходы RS-триггеров соединены с соответствующими входами формирователя импульсов, а инверсные выходы -
с соответствующими входами четвертого элемента ИЛИ, выход которого является пятым выходом блока, первый и второй выходы коммутатора соединены с вторыми входами соответственно первого и второго элементов ИЛИ, управляющий вход коммутатора является входом определения направления счета блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Синусно-косинусный преобразователь | 1975 |
|
SU551659A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1418904A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Преобразователь угол-код | 1983 |
|
SU1089603A1 |
| Преобразователь угла поворота вала в код | 1990 |
|
SU1751850A1 |
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1515365A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1312737A1 |
| Обратимый преобразователь координат | 1982 |
|
SU1035617A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления. Целью изобретения является расширение области применения за счет преобразования с различной дискретностью задания и расширения класса решаемых задач за счет имитации сигналов реальных датчиков. Устройство содержит блок 1 постоянной памяти, блок 2 выборки, реверсивные счетчики 3 и 4, блок 5 реверса счет, селектор 7 квадрантов, генераторы синусной 8 и косинусной 9 функций, фаэоинверторы 10 и 11, цифроаналого- вые преобразователи 1-2-15, сумматорчл 16 и 17. Формирование сигналов сину са и косинуса осуществляется С помощью линейной амплитудной модуляции опорных напряжений 4 сигналов положительных обратных связей с последующим суммированием с соответствующим масштабным коэффициентом сигналов, полученных в результате моду- лдций. Устройство обеспечивает возможность построения унифицированных преобразователей, работакяцих в сис темах с различной дискретностью задания, и возможность имитации (с учетом внутришаговой погрешности) сигналов реального индукционного датчика. 1 з.п. ю-лы, 2 ил. (Л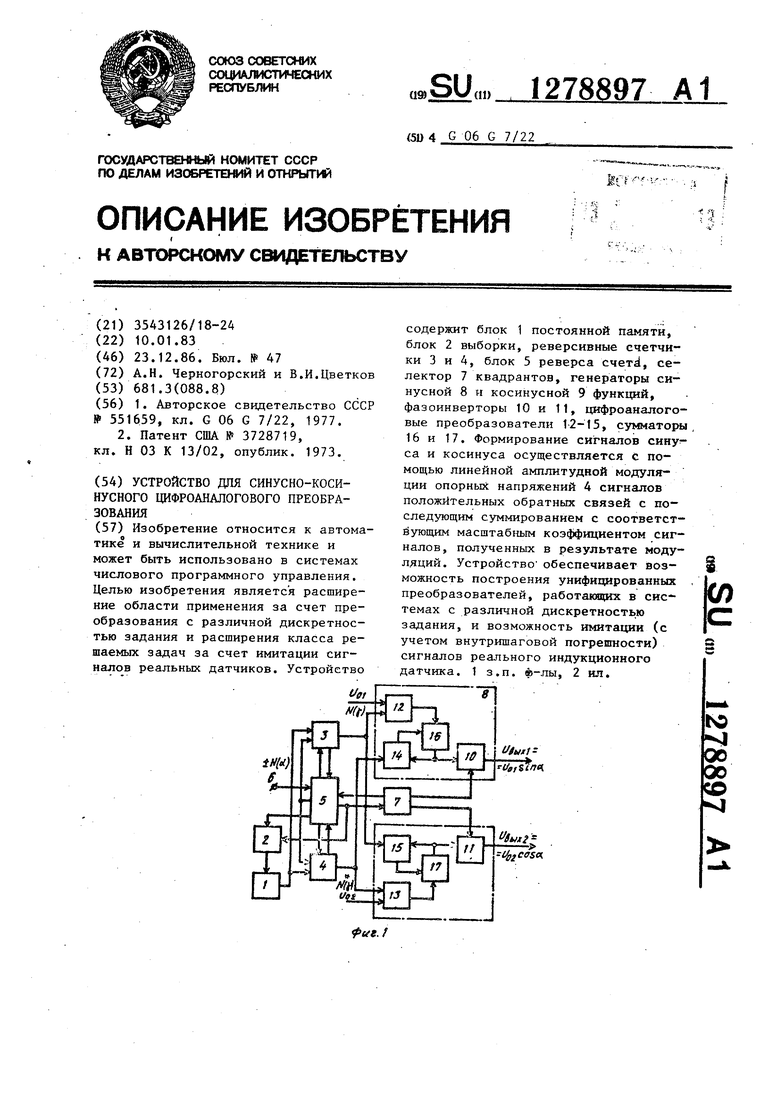
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Синусно-косинусный преобразователь | 1975 |
|
SU551659A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3728719, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
