МС;НлЛК)ЧГ:; .{) i,|i. . .,,,; .
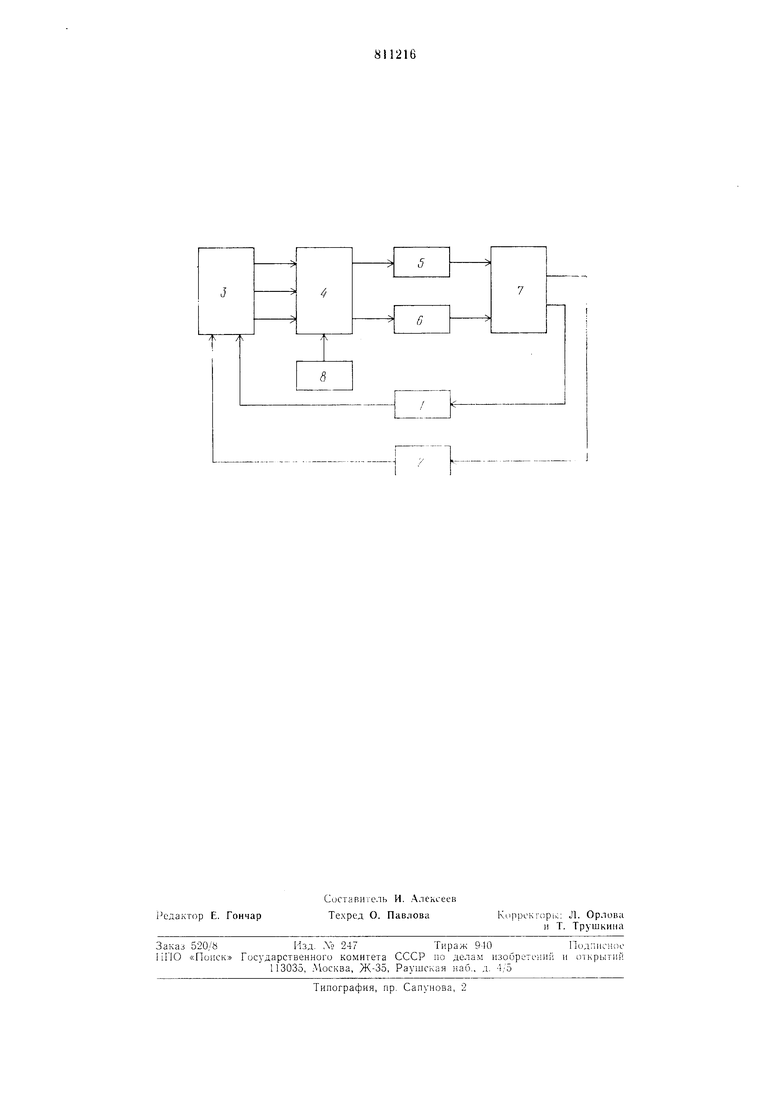
Ма чертеже изобра: е П (); ::;v.: :,к., i,.:;;, схема устройства л;:я ().ecririv:ij; ;.:i:;соба.
Сигналы с датчике) I 2 i(i.; J/i i4;iis; D действительном положении объекта поду;Т ся в 1 ычнслнтель;1ое ; етр();:ет1ш 3, г:и ni.: ществляется вычисление 3i;aKci3 ф л1кнни переключення 5 (х, у) п часг;,: .:)()3:{олdS dS
ных и .
дхду
Эта пнформац11Я иосгхиасл (.;U)i /югнческого 11ерек;1:0ча101иеги чг:-р() 1. которое формирует енглалы iipaii.-ie;iH;i на приводы 5 и 6 подач обьекта 7 11:;;п Ле Л1 в соотчзететвип с даннг;1л1 способом ;i)ai-;ления,
г,. dS
и - I Р sign-IУ У
. С}: ci cik 11 Ci:Ti :; внутренней fj;:j;:6ij
нра ,:n:i :-;)нзведс1ли, KO;fi . ju);; с
11(),1 0лме1 чосн:).л чводл п. Koirrx-jb; нии
бо;;)1Н1й : oiiTv|ii;{)4 .корг сти. чем а (: н:,ес i
;; ioaiiix С1;стемах. ч новьинает р01;з;5оди- V , м, ПОСТ, г pu;ii.-i.4;; ; ;1.; j) ; () j Op аiO Ва П Н Я .
15 CHCiu :,. е ;кч;;:,:;;.оваа тем ,:aHiio:o еНcoiKi Hpaii/cca:: h1Т :;};:.):;еде :ае кпнт,:)а :р()аеходн г и ел(1Лb,; i:ui-M .. (jKo/iu. aaiH 1:рн;ль.: c;n exu/ -оиьЧ ciioiiciaa. a влнччо, ач за:) :а1;т:::с1;. е;;:, емь: liJ 01 Ч Л1:еч ;: :О i; в:; ш ;i:a ючь: м ixi ,Л1 аствия:-.
: I то iBHpoxHX ввелл, а х.
- KCBi-p;: ii а ia,ил ;, ;; о;;етнчеи-лк- ;:еследоаавни сискллт .Taiaii.i ITIHS;, реалнз.дяцен л,а1л;ь н cj;e соб, нокава.М, чИ; cocTaij,т5Л а::ая 1В)ВП(чачв( тв r/6 ja6oTKii. выв:;ан ;;: Bi ва вл вювллчв ;: ;;о ()Ч1чм и воздевВ1внв:.л; н ;в;ме1;В1 чава MB-JIOB авизо Д(;1в оареввв i чете ч в оечовнсл: :)ач;ктва1()Ч1св1 (чюссбнос :тло чзв1ев )л ; i войств
систем в,в
, dS dS
sign S дх ay
О при sign Л-- . - -
д V
I , ,. ,. i}S
и, при sign л - - I .
ОЛ
signS - .. - 1 дх д у
) - и, при sign ; I
о нрп где (Уо-; const, , .У(л-, )ч и
- уравнение контура формообра.чог.ання: 5 (У) -функцня переключения; ,v. L,,--управляк)Н,не ;5о,Д,.сис:1пя .а :;pii воды cooTiiCTCTiieiiHo а;; ,iiнате А и tj.
Величина скорости л ;и:-ке1Ля оГ; ;,с;.;та определяется скг11а.Т()м с б;-(.ка чал.аггг r;;i)рости.
Уира з;1ЯЮ1.цнс- сигна. на i;i4in.;j,i.i ;; ;; б нодач формирования в виде разрывных фуа кций, при этом нрнвод, работакгг ii регулируемого привода а унра;;л 1,;;т: ,: только сигналом задания екорости. С.-иЛовательно, в данной системе нет CKOpocTiioa ошибки н, соответственно, координа iTioro запаздывания, снстел;а :;оз:и)ли1 i воспроизводить i OHTVi:bi с ()л1амн бес внутреппих оншбок, что выгодно .с; .:i;4a. :
н ввввов ч фввмив а;а 1ач .ввчала
I-; ::i Bpi;ii ;BB;B В в, о : ч ч а
с ч .В, ч Г; , . 41., :,В1 . KBibni(4iH;в.тчяннв п вавля10 нвх и ;В)вм чла Очи1л во 1ЧС1ВВ iBHBB ;в;менвввч Bai;awe:poB lipiiis; чв.)в iiB 1 авв1iBii; )Г|брв в:ванчя ч )1 iBiB.iH в)();вводнвс.1чи)етн нр;)в,есеа (j}0p в1обвав гзвЛ я, на эсвюве в ;ме|)сни;):х лей в ;ч;чтелвчв:х чначсмчч коо:)Л1Л:вт очвече чв О; вьв:к :|). Bi-;:4i : черехч;()чечая. ваве)в;Ч;(; () ivBTi-BBi; в: всвче.; Я :от Ч)ав Кч;1и коч 1 1)а в врмовбравпвачч 1. вив;-: -встчьр.
ЧрОВВВОЛ1::)1Х (.Ч i ЧЧ Л; Л е LK Л :() Н(.;
i-:a:-K4B)4 в,-; хвв;рлч в;: :-;oj:T ;ia в BIIBK H;IO i BBe4eiiB4 :j)i4 B4iii ввре1 в 1{;ч;л1нв в ее чвс1Ч; : ав;ч1- вввв., ч в завне): ввсти о; Biiai a час:в(в1 .BBJIBSBI/BBIBH i;o олвл K(JB|)тинате в , ,вкВ1еч :я jCре1ч.чоче :В.; ч ;ччает ч в; iip вввзолчв х (j)();v iBBBa.i вклоЧЧ1я |:1 ав;}ла обт екia iB) лч);Ввв )рд ЧЛВ1 в с вое :ч;ячвв ч j:11 в вл в)в;
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система направления подбирающего рабочего органа на ленту льна | 1984 |
|
SU1233827A1 |
| Устройство для вытяжения позвоночника | 1986 |
|
SU1409269A1 |
| Механизм для заливки воды в скипы подъемника доменной печи | 1951 |
|
SU94514A1 |
| Мокрый пылеуловитель | 1985 |
|
SU1310001A1 |
| Барабан ленточного конвейера | 1983 |
|
SU1105410A2 |
| Способ контроля впрыска топлива | 1981 |
|
SU1109531A1 |
| Автоматизированная система налива нефтепродуктов | 1987 |
|
SU1515059A1 |
| Двумерная автоматическая система компенсации | 1976 |
|
SU636587A1 |
| Устройство для измерения координат поверхности деталей,выполненных в виде тела вращения | 1985 |
|
SU1310611A1 |
| Электрический привод движителя судна | 1982 |
|
SU1054209A1 |