В технике испытаний материалов на удар применяются, так называемые, баллистические копры, представляющие собой совокупность двух параллельных маятников (бойка и наковальни), позволяющие измерять энергию, затрачиваемую на деформацию испытуемого материала.
Предлагаемый работомер отличается от известных устройств подобного рода тем, что он выполнен в виде двух полиспастов, гибкие тяги которых прикреплены к бойку и наковальне копра, а обоймы подвижных блоков полиспастов связаны с движками градуированных щкал, предназначенных для измерения скорости перемещения бойка и наковальни копра, и для определения работы, затраченной на деформацию образца испытуемого материала.
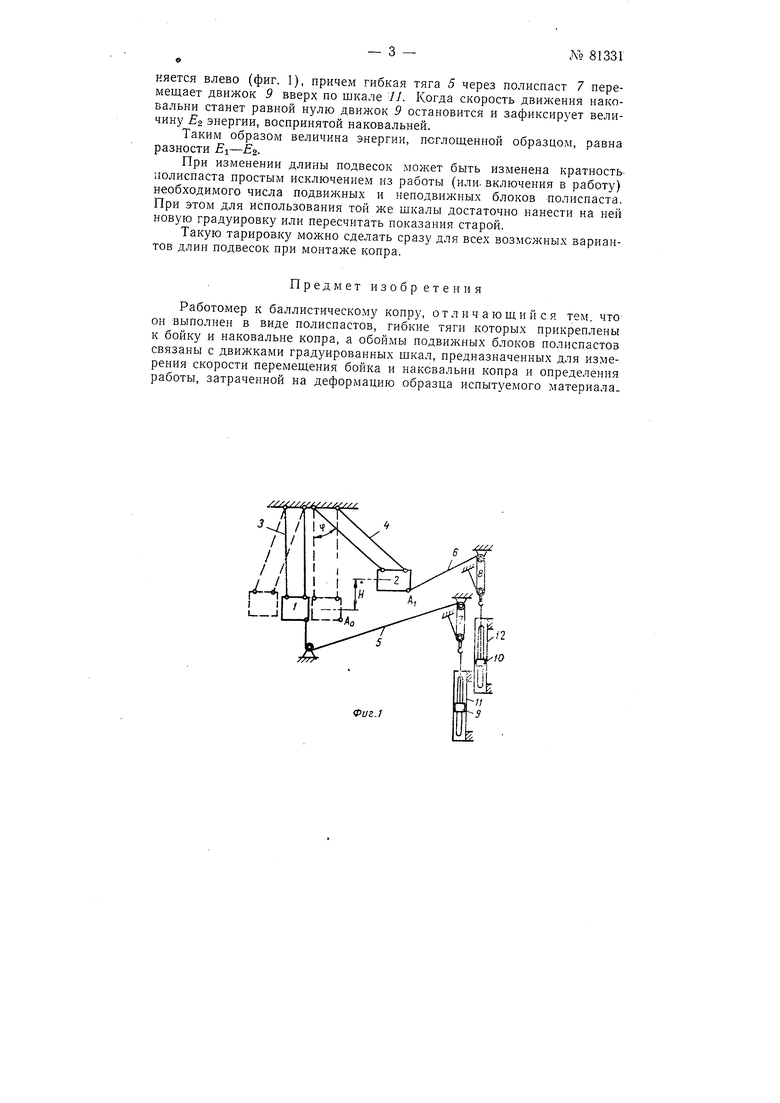
На фиг. 1 изображена схема работомера; на фиг. 2 -принципиальная схема действия прибора.
Рабстомер содержит наковальню / и бойки 2, подвещенные на параллельных подвесках 3 и 4. С наковальней и бойком соединены гибкие тяги 5 и 6 полиспастов 7, 8, обоймы подвижных блоков которых связаны с движками 5 и /О градуированных щкал 11 и 12.
Шкалы // и 12 градунрова;;ы в килограммометрах для измерения работы.
Движки 9 и 1G, скользят в прорезях щкал 11 и 12, как по направляющим и удерживаются на них силами трения, если со стороны гибких тяг не предлагается тяговое усилие.
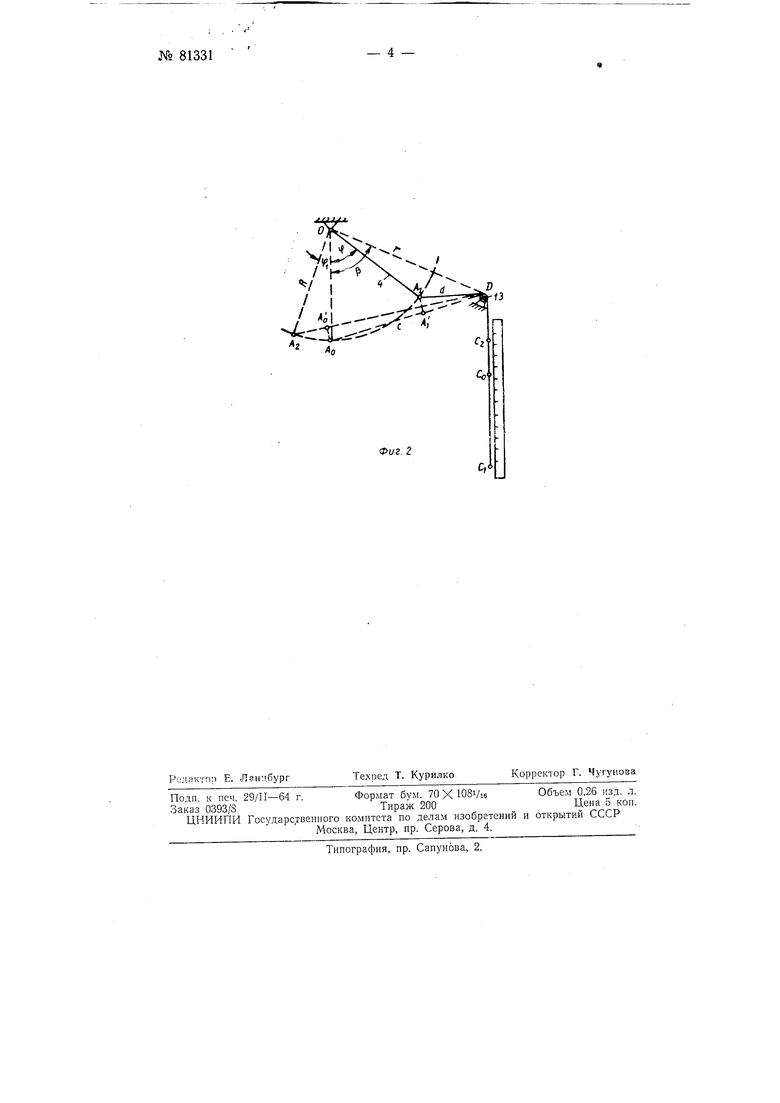
Действие работомера основывается на зависимости между углом отклонения подвески бойка (или наковальни) от вертикального положения и перемещением свободного конца натянутой гибкой тяги, другой конец которой перекинут через блок 13 и прикреплен к бойку или наковальне (фиг. 2). Эта зависимость определяется следующим образом.
№ 81331- 2 -
Пусть в равновесий точка соединения бойка (наковальни) с гибкой тягой занимает ноложение А. При этом другой конец гибкой тяги занимает ноложение CQ.
При отклонении бойка (или наковальни) на угол ф от вертикали точка АО поднимется на высоту Н R (1-со5ф), где R - длина нодвески 4, и займет положение Л а Со займет положение Cj. Соответствующее перемещение / конца нерастяншмой натянутой гибкой тяги определяется разностью отрезков AoD и , где D - точка касания гибкой тяги блока 13, а точка Al получаетсязасечкой радиусом AiD на отрезке AoD, т. е.
/ CflCi ЛоЛ1 ЛоО - iD. Если обозначить
AoD с; AiD d; OD г, то
+ -2/ /-cos(3-cp) ,(1)
где p - угол между OD и вертикалью.
При отклонении бойка (наковальни) в сторону отрицательных углов ф1 (т. е. перемещение точки АО в ноложение А, а точки Со в Са) соответствующее перемещение гибкой тяги равно:
СоС2 (точка Ао получается засечкой радиусом на отрезке AzD) и определится по уравнению (1), в котором угол ф заменен на ф1.
Если точка D не лежит в нлоскости продольной симметрии конра, а удалена от последней на расстояние I, то уравнение (1) получит вид;
+ l- + r - 2Rr cos (p - 9) .(2)
Bo избежание необходимости делать шкалы больших размеров при длинных подвесках копра или больших углах отклонения бойка (наковальни) между блоком 13 и свободным концом гибкой тяги вводится простой полиспаст 8 (или 7) оптимальиой кратности К..
В этом случае в уравнение (2) следует ввести величину кратности полиспаста.
Тогда перемещение свободного конца гибкой тяги равно;
- УС- + P-YR- +г- - 2Rr cos (8 - р),04
JK - )
Уравнение (3) определяет функциональную связь между величинами /л- и ф, а следовательно, и между перемещениями движков 9 и /О и отклонениями наковальни 1 и бойка 2.
Перемещение движков характеризует запас энергии бойка, а перемещение движка 10 - энергию, воспринятую наковальней.
Предлагаемый работомер действует следующим образом.
Боек 2 (фиг. 1) при зарядке нормально отклоняется в сторону положительных углов ф, поднимаясь на некоторую высоту Я. При этом движок 10 от руки устанавливается в нижней части щкалы l/f так, чтобы гибкая тяга 6 была бы натянута. Указатель движка 10 фиксирует на шкале 10 сообщенный бойку запас энергии Е-.
Во время падения бойка гибкая тяга 6 через полиспаст 8 заставляет движок 10 перемещаться вверх. После нанесения удара образцу, укрепленному на торце наковальни 1 боек 2 улавливается снециальным приспособлением. Движок 10 автоматически фиксирует показание (нулевое при вполне упругом ударе и отрицательное при неупругом или не вполне упругом ударе). Получив удар, наковальня 1 с образцом отклокяется влево (фиг. 1), причем гибкая тяга 5 через полиспаст 7 перемещает движок 9 вверх по шкале 7/. Когда скорость движения наковальни станет равной нулю движок 9 остановится и зафиксир ет величину 2 энергии, воспринятой наковальней.
Таким образом величина энергии, поглощенной образцом, равна разности EI- 2При изменении длины подвесок может быть изменена кратность полиспаста простым исключением из работы (или. включения в работу) необходимого числа подвижных и неподвил ных блоков полиспаста. При этом для использования той же шкалы достаточно нанести на ней новую градуировку или пересчитать показания старой.
Такую тарировку можно сделать сразу для всех возможных вариантов длин подвесок при монтаже копра.
Предмет изобретения
Работомер к баллистическому копру, отличающийся тем. что он выполнен в виде полиспастов, гибкие тяги которых прикреплены к бойку и наковальне копра, а обоймы подвижных блоков полиспастов связаны с движками градуированных шкал, предназначенных для измерения скорости перемещения бойка и наковальни копра и определения работы, затраченной на деформацию образца испьтемого материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для наблюдения и графической записи величины погружения свай | 1948 |
|
SU79176A1 |
| ПРИБОР ДЛЯ ПРОФИЛИРОВАНИЯ СОПРЯЖЕННЫХ ПОВЕРХНОСТЕЙ | 1973 |
|
SU397378A1 |
| МОБИЛЬНЫЙ ПЕРЕНОСНОЙ КОПЕР | 2000 |
|
RU2203359C2 |
| ПРИБОР ДЛЯ ПРОФИЛИРОВАНИЯ СОПРЯЖЕННЫХ ПОВЕРХНОСТЕЙ | 1971 |
|
SU309854A1 |
| Устройство для измерения сдвига фаз | 1933 |
|
SU42904A1 |
| СТЕНД ДЛЯ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ | 2013 |
|
RU2555198C2 |
| Устройство для учета продукции | 1936 |
|
SU51548A1 |
| Сейсмоплатформа | 2019 |
|
RU2700833C1 |
| АВТОМАТИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ДИФФЕРЕНЦИАЛЬНО-ТРАНСФОРМАТОРНЫХ | 1970 |
|
SU270878A1 |
| Задатчик соотношения в количественных регуляторах | 1961 |
|
SU141045A1 |
Фиг.}
Фиг. г
