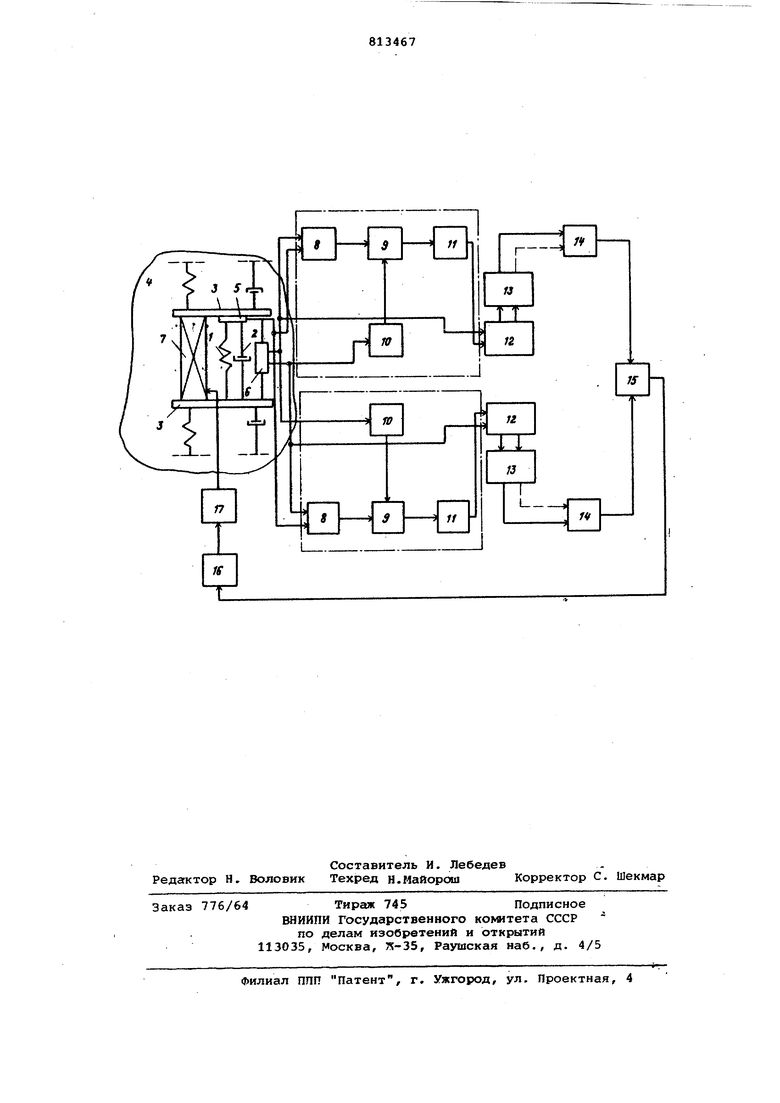
Изобретение относится к испытател ным приборам и может быть использова но при автоматизированном анализе и синтезе нелинейных колебательных систем. Известны устройства для определения параметров связей, предназначенные для определения д: ламических характеристик по трудно реализуемым характеристикам случайных процессов или линейных коэлфициентов жесткости и демпфирования Cl. Наиболее близким к предлагаемому является устройство, содержащее элек тромеханический динамометр, упругие и демпфирующие элементы связи, блок датчиков относительного перемещения и скорости, вибратор и схему вычисления f2 . Устройство позволяет получить только линейные коэффициенты жесткос ти и демпфирования, необходимые для оценки полных связей или устойчивости систем при полунатурном моделировании прецизионных колебательных систем с нелинейными связями. Цель изобретения - расширение кла са решаемых задач за счет возможност определения нелинейных коэффициентов жесткости и демпфирования связи. Поставленная цель достигается тем, что в устройство для определения хаг рактеристик упругости и демпфирования нелинейного упругого объекта при полунатурном моделировании, содержащее вибратор и блок датчиков относительного перемещения и скорости, устанавливаемые между концами исследуемого упругого объекта, электромеханический динамометр, прикрепленный к одному концу исследуемого упругого объекта, упругий и демпфирующий элементы, прикрепляемые одними концами к электромеханическому динамометру, а другими - к другому концу исследуемого упругого объекта, два вычислительных канала, каждый из которых состоит иэ делителя, ключа, нуль-органа и повторителя уровня импульсов, причем выход делителя соединен с информационным входом ключа, управляющий вход которого связан с выходом нуль-органа, а выход ключа соединен со входом повторителя уровня импульсов , выход электромеханического динамометра соединен с первыми входами делителей обоих каналов, выход сигнала перемещения блока датчиков относительного перемещения и скорости соединен со вторым входом делителя пер- вого канала и входом нуль-органа вто рого канала, выход сигнала скорости блока датчиков относительного переме щения и скорости соединен со вторым входом делителя второго канала и вхо дом нуль-органа первого канала, допол нительно введены два распределителя импульсов, два блока памяти, два индикатора заполнения элементов блока памяти, элемент И, дополнительный ключ, генератор случайного сигнала, причем к выходам повторителей уровня импульсов каждого из каналов подключе ны первыми входами соответствующие распределители импульсов, которые через последовательно соединенные блок памяти и индикатор заполнения элементов блока памяти соответственно подключены к двум входам элемента И, выход которого соединен со входом дополнительного ключа, выход которого соединен с управляющим входом генератора случайного сигнала, выход которого соединен со входом вибратора. На чертеже представлена блок-схема устройства. Устройство содержит упругий и демп фирующий элементы 1 и 2, прикрепленные каждый к концам 3 исследуемого упругого объекта 4, электромеханический динамометр 5, блок б датчиков относительного перемещения и скорости, вибратор 7, делители 8, ключи 9, инди каторы 10 нуля, повторители 11 уровня импульсов, распределители 12 импульсов, блоки 13 памяти, индикатору заполнения элементов блока 14 памяти элемент И 15, блок 16 управления и генератор 17 случайного сигнала. Устройство работает следующим образом. Движение системы описывается дифференциальным уравнением:
С ( X-Y ) ( X-Y ) + К ( X-Y ) ( X-Y ,
(1)
F + F
2.1
где С(X-Y) - нелинейный коэффициент
упругости связи; К {X-V) - нелк ейный коэффициент
демпфирования связиj X, X - абсолютные перемещение и - скорость первого конца
связи;
Y, Y - абсолютные перемещение и скорость второго конца связи; F - реакция инерционных сил
объекта на связь; F - сила воздействия вибра тора на связь. При полунатурном моделировании, т. е. при автоматизированном синтезе связи системы, объект подключается в контур полунатурного моделирования. Вибратор 7 создает усилие пропорциональное усилию синтезируемых допол нительных элементов жесткости, демпфирования или инерционных элементов.
С(X-Y) ( X-Y) + К:X-Y)(X-Y)
.(3)
X-Y
Аналогично, на вход блока деления второго канала поступает напряжение с датчика 5 и напряжение, пропорциональное скорости X-Y, с выхода блока датчиков 6. На выходе блока деления второго канала Формируется напряжение, пропорциональное величине:
Ра C(X-Y) (X-Y)-fK(X-Y) (X-Y)
(4)
X-Y
X-Y
Ключ 9 первого канала постоянно закрыт за исключением момента, когда на его управляющий вход поступает сигнал с нуль-органа 10, т. е. он выдает
40 импульс в момент, когда X-Y становится равным нулю. При этом на выходе ключа 9 появляется кратковременный импульс, амплитуда которого пропорциональна коэффициенту жесткости связи с X-Y, при конкретном значении и если при этом величины связей 1 и 2 неизвестны, трудно оценить устойчивость контура полунатурного моделирования, а также связь в целом. Поэтому устройство полунатурного моделирования переключается в режим идентификации, т. е. вход вибратора вручную или по общеизвестным автоматическим методам отключается от контура полунатурного моделирования и переключается на режим устройства для определения параметров нелинейных связей при полунатурном моделировании как показано на чертеже. Генератор 17 вырабатывает случ - Лный сигнал с уровнем амплитуды, необходимой для возможных наибольших X-Y и X-Y в полунатурной модели. Амплитуды X-Y и X-Y контролируются по показаниям датчиков 6. Электромеханический динамометр 5 выдает на выходе напряжение, пропорциональное усилию, создаваемому в упругих 1 и демпфирующих 2 элементах связи, равному F . Движение координат связи происходит по уравнению: F.J C(X-Y)(X-Y) ± K(X-Y)(X-Y). (2) В ТО же время блок 6 датчиков на выходах выдает напряжения, пропорциональные относительному перемещени э X-Y и скорости X-Y. На входы блока 8 деления первого канала поступает напряженче от динамометра 5 и напряжение, пропорциональное перемещению X-Y, с блока датчиков б. На его выходе формируется напряжение, пропорциональное величине:
X-Y , что следу1ет из уравнения (3) при X-Y О:
С(X-Y)(X-Y)+K(X-Y)(X-Y)
c(x-Y) (s:
X-Y
Аналогично, когда X-Y становится равным нулю, на выходе ключа 9 второго канала появляется сигнал, амплитуда которого пропорциональна коэффициенту демпфирования амортизатора К(Х-Y), при конкретном значении X-Y , что следует из уравнения (4) при
X-Y О: С(X-Y)(X-Y)+К(X-Y)(X-Y) к(X-Y) (б) X-Y
Импульсы напряжения с выходов блоков 9 поступают на фиксаторы 11 уровня импульсов, которые вырабатывают напряжения, равные амплитуде импульсов с выхода блока 9, т. е. пропорциональное коэллициенту С(X-Y} и коэффициенту К { X-Y) .
Напряжение, пропорциональное коэффициенту упругости, поступает через первый распределитель 12. импульсов на первый блок 13 памяти.
Первый блок памяти состоит из конечного числа элементов памяти, в каждый из которых сигнал распределяется в зависимости от величины напряжения, пропорционального X-Y, т. е. в первом блоке 13 памяти формируется кц:1яС(Х )ДИскретизированная по (X -Ч)Лналогично в зависимости от значения во втором блоке 13 памяти поучаем дискретизированную функциюК(х-).
В момент, когда все элементы блоков памяти заполнены, .I полностью имеем Лункции C(X-Y) и K(X-Y) на выходах блоков 13.
Чтооы фиксировать,, что процесс определения параметров закончен, выходы блоков памяти подключены к входам индикаторов заполнения элементов блока памяти 14, которые состоят из элементов И и выдают напряжение на выходе в том случае, когда все ячейки блоков памяти заполнены. При этом на входах элемента И 15 сигналы будут- совпадать, и на его выходе также появится напряжение, которое отключает через блок 16 управления генератор 19, и также может подключить автоматически упомянутый конутр полунатурного моделирования.
В некоторых случаях устройство для определения параметров нелинейных связей при полунатурном моделировании может работать непосредственнЪ при автоматизированном синтезе связи, если колебания системы имеют случайный характер. .
Таким образом, выполнение устройства в соответствии с изобретением открывает большие возможности учета не линейных связей при автоматизированном синтезе прецизионных приборов и
механизмов методами полунэтурного моделирования, применяя как аналого-. вые, так и аналого-цифровые вычислительные машины.
Формула изобретения
Устройство для определения характеристик упругости и демпфирования нелинейного упругого объекта при полунатурном моделировании, содержащее вибратор и блок датчиков относительного перемещения и скорости, устанавливаемые между концами исследуемого упругого объекта, электромеханический динамометр, прикрепленный к одному концу исследуемого упругого объекта, упругий и демпфирующий элементы, прикрепляемые одними концами к электромеханическому динамометру, а другими - к другому концу исследуемого упругого объекта, два вычислительных канала, каждый из которых состоит из делителя, ключа, нуль-органа, и повторителя уровня импульсов причем выход делителя соединен с информационным входом ключа, управляющий вход которого связан с выходом нульоргана, а выход ключа соединен со входом повторителя уровня импульсов,, выход электромеханического динамометра соединен с первыми входами делителей обоих каналов, выход сигнала перемещения блока датчиков относительного перемещения и скорости соединен со вторым входом делителя первого канала и входом.нуль-органа второго канала, выход сигнала скорости блока датчиков относительного перемещения и скорости соединен со вторым входом делителя второго канала и входом нульоргана первого канала, отличающееся тем, что, с целью расширения класса решаемых задач, в него дополнительно введены два распределителя импульсов, два блока памяти два индикатора заполнения элементов блока памяти, элемент И, дополнительный ключ и генератор случайного сигнала, причем к выходам повторителей уровня импульсов каждого из каналов подключены первыми входами соответствующие распределители импульсов, которые через последовательно соединенные блок памяти и индикатор заполнения элементов блока памяти соответственно подключены к двум входам элемента И, выход которого соединен со входом дополнительного ключа, выход которого соединен с управляющим входом генератора случайного сигнала, выход которого соединен со входом вибратора
Источники информации, принятые во внимание при экспертиз.е
. 1. Авторское сви детельство СССР 450139, кл. G 05 В 23/02, 1972.
2. Авторское свидетельство СССР № 596763, кл. F 16 F 15/03, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Амортизатор с автоматическим управлением | 1976 |
|
SU596763A1 |
| Цифровой динамометр | 1984 |
|
SU1185130A1 |
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Устройство для полунатурного моделирования колебательных систем | 1980 |
|
SU922800A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЁСТКОСТИ | 2003 |
|
RU2249244C2 |
| Устройство для моделирования ротор-НыХ СиСТЕМ | 1979 |
|
SU822221A1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2003 |
|
RU2249243C2 |