1
Изобретение относится к аналоговой вычислительной технике и может быть использовано для моделирования сложных нелинейных динамических систем.
По основному авт.св. № 734734 известно устройство, которое содержит датчики параметров исследуемого объек та, которые через соответствукмцие усилители соединены со входами блока моделирования кинематической связи объекта с колеблющимся основанием, один выход которого соединен с первым входом сумматора, а соответствующий вход и другой выход подключены соответственно к выходу и входу блока оптимизации, блок формирования обратной передаточной функции возбудителя колебаний и усилитель мощности, вход которого подключен к выходу сумматора а выход соединен со входом возбудителя колебаний, который установлен на колеблющемся основании и на столе которого установлен датчик перемещения стола возбудителя колебаний, элемент демпфирования и упругий элемент, установленные между колеблющимся основанием и столом возбудителя колебаний, дополнительные усилители и дат чик перемещения колеблющегося основания, выход которого и выход датчика перемещения стола возбудителя колебаний через соответствующие дополнительные усилители соединены с соответствующими входами блока моделирования связи объекта с колеблющимся основанием и блока формирования обратной передаточной функции возбудителя колебания, выход которого
0 соединен со вторым входом сумматора 1.
Однако это устройство иМеет невысокую точность моделирования, так как не учитывается влияние на устойчивость
5 устройства структуры самого объекта.
Цель изобретения - повышение точности моделирования.
Указанная цель достигается тем, что устройство содержит датчики параметров кинематических связей между сосредоточенными массами объекта, датчики параметров кинематических связей между столом возбудителя колебаний и колеблющимся основанием,
5 блоки вычисления вибрационного усилия и два дополнительных сумматора, выходы которых соединены с дополнительными входами блока оптимизации, выходы датчиков параметров кинемати0ческих связей между сосредоточенными
массами объекта и выход датчика перемещения стола возбудителя колебаний соединены с соответствующими входами первого блока вычисления вибрационного усилия, выходы которого соединены с первыми входами дополнительных сумматоров, а выходы датчиков параметров кинематических связей между столом возбудителя колебаний и колеблющимся основанием и выход датчика перемещения колеблющегося основния соединены с соответствуюпщми входами второго блока вычисления вибрационного усилия, выходы которого соединены со вторыми входами дополнителных сумматоров,
На чертеже приведена схема устройст ва для полунатурного моделирования.
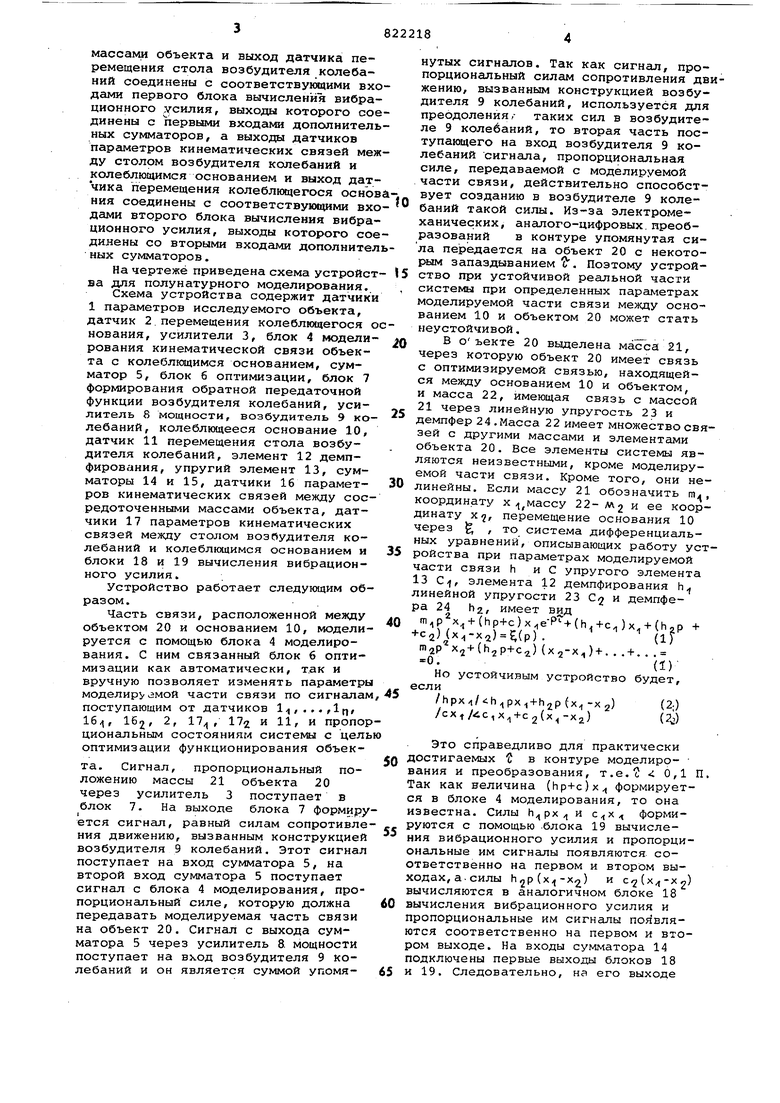
Схема устройства содержит датчики 1 параметров исследуемого объекта, датчик 2.перемещения колеблющегося онования, усилители 3, блок 4 моделирования кинематической связи объекта с колеблкяцимся основанием, сумматор 5, блок б оптимизации, блок 7 формирования обратной передаточной функции возбудителя колебаний, усилитель 8 мощности, возбудитель 9 колебаний, колеблющееся основание 10, датчик 11 перемещения стола возбудителя колебаний, элемент 12 демпфирования, упругий элемент 13, сумматоры 14 и 15, датчики 16 параметров кинематических связей между сосредоточенными массами объекта, датчики 17 параметров кинематических связей между столом возбудителя колебаний и колеблющимся основанием и блоки 18 и 19 вычисления вибрационного усилия.
Устройство работает следующим образом.
Часть связи, расположенной мелоду объектом 20 и основанием 10, моделируется с помощью блока 4 моделирования. С ним связанный блок 6 оптимизации как автоматически, так и вручную позволяет изменять параметры моделиру 2мoй части связи по сигналам поступающим от датчиков 1,...,1ц, 16, 1б2, 2, 17, 172 и 11, и пропорциональным состояниям системы с цель оптимизации функционирования объекта. Сигнал, пропорциональный положению массы 21 объекта 20 через усилитель 3 поступает в блок 7. На выходе блока 7 формируется сигнал, равный силам сопротивления движению, вызванным конструкцией возбудителя 9 колебаний. Этот сигнал поступает на вход сумматора 5, на второй вход сумматора 5 поступает сигнал с блока 4 моделирования, пропорциональный силе, которую должна передавать моделируемая часть связи на объект 20. Сигнал с выхода сумматора 5 через усилитель 8. мощности поступает на вход возбудителя 9 колебаний и он является суммой упомянутых сигналов. Так как сигнал, пропорциональный силам сопротивления двжению, вызванным конструкцией возбудителя 9 колебаний, используется для преодоления,- таких сил в возбудителе 9 колебаний, то вторая часть поступаннцего на вход возбудителя 9 колебаний сигнала, пропорциональная силе, передаваемой с моделируемой части связи, действительно способствует созданию в возбудителе 9 колебаний такой силы. Из-за электромеханических, ансшого-цифровых.преобразований в контуре упомянутая сила передается на объект 20 с некоторым запаздыванием . Поэтому устройство при устойчивой реальной части системы при определенных парс1метрах моделируемой части связи между основанием 10 и объектом 20 может стать неустойчивой.
В оъекте 20 выделена масса 21, через которую объект 20 имеет связь с оптимизируемой связью, находящейся между основанием 10 и объектом, и масса 22, имеющая связь с массой 21 через линейную упругость 23 и демпфер 2 4. Масса 22 имеет множество свзей с другими массами и элементами объекта 20. Все элементы системы являются неизвестными, кроме моделируемой части связи. Кроме того, они нелинейны. Если массу 21 обозначить т координату X-,,массу 22- М2 и ее координату , перемещение основания 10 через g , то система дифференциальных уравнений, описывающих работу усройства при параметрах моделируемой части связи h и С упругого элемента 13 С-(, элемента 12 демпфирования h линейной упругости 23 С и демпфера 24 ha, имеет вид
«IIP X +(hp+c)(h.+c.)x, + (h,p + H-C2)(xVx2) e(p). (ir
П)2Р + C) (X2-X) + . .. + ...
-0.(I)
Ho устойчивым устройство будет, если
/hpxi/ h pxi + h2p ()(2;)
/cx / CiX +CgCx -x)(2J
Это справедливо для практически достигаемых С в контуре моделиро- вания и преобразования, т.е. 4 0,1 Так как величина (hp+c)x формируется в блоке 4 моделирования, то она известна. Силы ,, и формируются с помощью блока 19 вычисления вибрационного усилия и пропорциональные им сигналы появляются соответственно на первом и втором выходах,а-силы h2p() и ( вычисляются в аналогичном блоке 18 вычисления вибрационного усилия и пропорциональные им сигналы появляются соответственно на первом и втором выходе. На входы сумматора 14 подключены первые выходы блоков 18 и 19. Следовательно, на его выходе
появляется сигнаш, пропорциональный сумме диссипативных сил, т.
AbiX + h2pl l- 2V(3)
На входы сумматора 15 подключены вторые выходы блоков 18 и 19, Следовательно, на его выходе появляется сигнал, пропорциональный сумме упругих сил,т.е.
Сигналы с выходов сумматоров 1&
и 14 поступают на входы блока 6 оптимизации и используются в нем для ограничения изменения оптимизируемых параметров h и с при условиях (2;,) и (22). При действиии таких .ограничений устройство может выйти и области устойчивости при автоматической оптимизации из-за наличия цепей запаздывания в контуре моделируемой части связи.
Предложенное устройство выгодно о личается от известных, так как учитывает влияние дополнительных связей на устойчивость работы устройства при различных исследуемых объектах. В нем осуществляется автоматическое з щание ограничений на оптимизируемые параметры, а выделению одной связи объекта с сосредоточенными массами не представляет особых трудностей, так как параметры ее вычисляются в ходе работы устройства, в то время как другая часть объекта может быть более сложной, т.е. с распределенными параметрами,и т.д.
Формула изобретения Устройство для полунатурного моделирования по авт.св. № 734734,
отличающее,ся тем, что, с целью повышения точности моделирования, оно содержит датчики параметров кинематических связей между сосредоточенными массами объекта,. датчики параметров кинематических связей между столом возбудителя колебаний и колеблющимся основанием, блоки вычисления вибрационного усилия и два дополнительных сумматора, выходы которых соединены с дополнитель0ными .входами блока оптимизации, выходы датчиков парс1метров кинематических связей мезкду сосредоточенными массами объекта и выход датчика перемещения стола возбудителя ко5лебаний соединены с соответствующими входами первого блока вычисления вибрационного усилия, выходы которого соединены с первыми входами дополнительных сумматоров, а выходы датчиков параметров кинематических связей
0 между столом возбудителя колебаний и колеблющимся основанием и выход датчика перемещения колеблгацегося основания соединены с соответствующими входами второго блока вычисления виб5рационного усилия, выходы которого соединены со вторыми входами дополнительных сумматоров.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 734734, кл. G 06 G 7/48, 04.11.76. (прототип). ьнф tk та / . . . f ,3 10 п. / -

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516057A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU661567A1 |
| Устройство для моделирования виброзащитных систем | 1975 |
|
SU607239A1 |
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU947877A1 |
| Устройство для моделирования виброзащиты оператора | 1979 |
|
SU864304A1 |
| Устройство для полунатурного моделирования колебательных систем | 1980 |
|
SU922800A1 |
| Двухкоординатный гаситель колебаний с автоматической оптимизацией | 1976 |
|
SU729396A1 |
| Амортизатор с автоматическим управлением | 1976 |
|
SU596763A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU607240A1 |

