I
Изобретение относится к области ана логовой вычислительной тахники и может быть Использовано при исследовании сложных нелинейных динамических систем с реальными объектами.
Известно устройство для попунатурноfo моделирования, содержащее датчики параметров исЬледуемогх объекта, возбудитель колебаний, усилители, блок моделирования динамической системы, блок управления параметрами, сумматор, блок формирования обратной передаточной функции и усилитель мощности l. Однако это устройство позволяет провести полунатурное моделирование только в узких зонах устойчивого функционирования контура полунатурного моделирования и полунатурное модапирсвакие не может быть проведено, если парамет™ ры контура соответствуют неустойчивым зонам функционирования контура,
Наиболее близким техническим реше1шем к данному изобретению является
устройство, которое содерншт датчики параметров исследуемого объекта, которые через соответствующие усилители соединены со входами блока моделирования кинематической связи объекта с колеблющимся основанием, один выход которого соединен с первым входом сумматора, а соответствующий вход и другой выход подключены соотвётствеино к выходу и входу блока оптимизащ1и, блок формирования обратной передаточной фунлодии возбудителя колебаний и усилитель мощности, вход которого подключен к выходу сумматора, а выход соединен со входом возбудителя колебаний, который установлен на колеблящемся основании и на столе которого установлен датчик перемещения стола возбудителя колебаний 2. Кроме того, это устройство содержит блок дифференцирования и блок определения интервала. Однако оно без стабилизирующих цепей не обеспечивает устойчивость в зоне измерения параметров с целью оптимиза373
ции функционирования объекта без потерн точности.
Целью изобретения является расширение области применения и увел1 чение т о ч н ост и р 0.6 от ы.
Указанная цепь яостигае1х;я тем, что Глродлш аамое устройство для полу 5.атурного модепирования содержит элемент де1.,ьпфкровакия и упругий элемент, устшэ овленные менаду колеблющимся основанкем к столом возбудителя колебаний j йополнительыъю усилитапи и датчик нерв- мещекия колеблющегося ссновашш, выход хсогорого и выход датчика перемещения стопа возбудителя колебаний через соотBSTCTByioiutse дополнительные усилители соединены с соответствующими входама блоха модел.ирования связи обьек-. та с ко 1еблющимся основанием ,и блока формирования обратной передаточ- ной фушахии возбуцателя колебаний, выход лсоторого соэдинен со вторым входом сумматора.
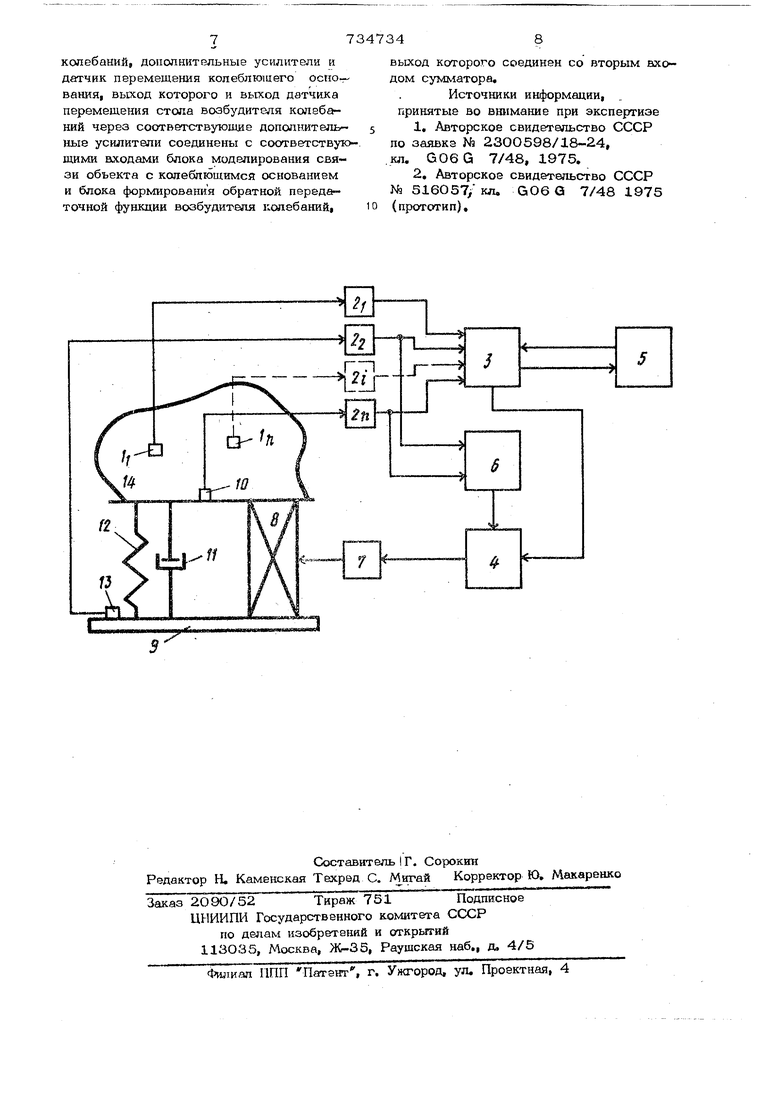
Схамй устройства для попунаторного мо.ци1крования приведена на чертеже,
Устройство содержит датчики. 1 пара-мэЕров Г1ссле 1.5емого объекта, усклктеди 2{ OvSOK 3 .,1од8йироваЕ1Ш кннемат;г-18с.кой СБ513Й сбъЕ:йта с кодебякзшимся основа- oHEMv с ламгтор 4;, блок 5 аптагиизадив; 5йок 6 формирования обратной передаточной фучклк.ь Бозбудкти ка ебаний усй.дьгг&чь 7 мо.щностн,, во эбудкта.: в, копе банийг колеСшгощееся основание 9 датч;пк .10 перамг75здэи.йя стола Еозб;у;:,кт&.хз колэ банки, элемент ;il деькфнрованин; уирУ гий апексэнт 12 и датчик 13 иеремешении cajia6ji G4.aeix)CH ccHOBaHjai.
wcTpOHCTBO работает слздую длм ,.
lacTb СБязи между объектом 14 и колеб.;ши;Ц5Мся основаишем 9 моделирует ся с помоишю блока 3 моделированияе С ним связанный, блок 5 как автоматкчесгш, так а вручную позволяет измеЕять параметры моделируемой части СБйЗй по сигналам, поступающим от дат чипов .1,« , J.,, , 1 у5 Р порционалыаол параметрам состояния обьекта, с целью оптимизадии функциониро.вания объекта. Сигнал с датчика lOj пропорциональный положению стола воз будителя колебаний, поступает через усилитель 2 в блок 3, в который таким же образом пеступает сигнал с датчика 13, пропорциональный положению основания 9 По параметрам структуры г/юделируеsvioE части связи, изменявшем блоком 5 оптим1«заи.и.и, и упомянутым сигналам с
44атчиков 1, 10 и 13 на выходе блока 3 формируется сигнал, пропорциональный сюте f rt, , создаваемой моделируемой частью связи на объект 14, вызванной колеба1иялш основания 9, и реакцией объекта 14 на эту часть связи. Он пост -пает на вход cy /nviaTopa 4, На другой вход сумматора 4 поступает выходной сигнал датчика 1О, пропорциональный Положению стола возбудителя 8 копебаниЙ8 через усили- вль и блок 6 формирования обратной передаточной функции возбудителя колебаний, т.е. в случае электродинамического возбудителя колебаний
W(p)mp4hp- -C (1)
где р - оператор диффере1щ.ирования
( ff );
trv - масса подвижной части возбу-
рдтеля 8 колебаний, ti - коэффициент демпфирования
возбудителя 8 кслебаний, С - коэффициент подвески стопа
возбудителя 8 колебанкй. TavciiM образом, на второй кход суммаа-ора 4 поступает сигнал, пропордиовшшньа с1-ш,е FC соцротнвлешш движеншо возбудителя 8 колебаняйр т.е.
F, x(vnp.hp c)j (2)
Cstriiaji с в.ыхода cj i/Asaxopa l-j. пропорциошзлызьШ сумме f с через усилателъ 7 ьюш.ност51 поступает/на управйяюшйй ВХОД воз.будцте,я 3 коиеба.ний и .«iBjmeTCsi воо.бумщаю.шям, С другой сто- poHi-л на воз6уд|1тиш 8 коиебанЕй деист- .вуют скйы соп зотивления движению, т.е. реакш1я R овЗъакта 14 и сила F (2), вызванЕ;щ к.онструкц :1ей возбудителя 8. РавноБвсие сшг, действующих на вибратор Б(.збуд(теля 8 колебаний
.(mp4hp c)(tY p -vbp-tcyt3)
При точном подборе параметров в блоке 6 получаем
т.е возбудитель 8колебаний развивает силу, действующую на объект и равную силе поступающей с блока 3, пропорцио- напьную силе, развиваемой моделируемой частью связи на объект 14, Но так как электромахаяическое преобразование всегда сопровождается неточностью изза цеточности подбора параметров {в блоке 3) или разброса параметров само го возбудителя 8 колебаний, цепей измэ рения, а такгке применения цифроаналого вых и аналого-цифровых преобразователей в контуре, то сила на объект 14 передается с некоторым запаздыванием С . Таким образом, если передаточная функция объекта по силе {аходная величина сила) WQP , а моделируемой части связи по координате (входная величина координата) Wcx;то характеристическое уравнение контура попунатурного моделирования имеет вид . -.(4 Если, например, объект 14 характеризуется массой Hi , а моделируемая часть связи - параметрами жесткости с и демпфирования Ji , то выражение (4) преобразуется к виду vnp2-v( Р .о. (5 Но это уравнение, а следовательно и контур полунатурного моделирования, характеристическим уразненкем: которого оно является, име-ет широкие зоны неустойчивости. В устройство введены элемент И демпфирования с коэфф1цще11том: демпфирования ti А упругий элемент 12 с коэффициентом демпфирования жесткости с-{ . Характеристическое уравнение контура полунаторного моделирования имеет при этом вид mp()e-P%V P VO. Из уравнения (6) видно, что если и с с ,(7 то контурполунатурного моделирования, характеристическим уравне-лшм которого является уравнение (6), будет ус1-ойчи вым при всех 2 О для параметра ll и при практически достигаемых Т (О, 1 для параметра с, Если объект 14 содержит болве слож ную структуру с неизвестными параметрами, то характеристическое уравнение контура полунатурного моделирования остается вида (В)с Увелигчиваются только численные значения коэффициентов жесткости и демпфирования при членах уравнешш-(6) без запаздывания. Поэтому контур полунатуртюго модолирования при устойчивой динамической системе (объекта) является устойчивььм, и выше сделанные рассуждения Bupa«t ния (7) остаются в силе. Устройство обеспечшзает такЕ1м оорк-. зом устойчивость функдио1а}роБа. при выполнении.условий (7) Так. как козффгщиенты tXj « C.f заранее известны или определяются, тс оптиг.щзация параметров связи мидулируемой в блоке 3 не представляет никакн-х. особенностей и легко осуществи1 ;а„ Таким образом, введен; ;; элом&11ча 11 демпфирования и упругого элементе 12, а также соответствуюш.эго управления возбудителем 8 колёбакцй способствует осуществлению устойчивости устройства полунатурнот-о модзлировоиик в диапазоне изменения napvaMea poB моделируемой части системы с допью оптимизации функционирования объекта без уменьшения точности, а ис1-У1Ючение опасности возникновения неустойчивости режимов в контура при STON; позволяет пррвести попунатурное ;одел фова™ ние чзвствительиых. прйцизиоьгпъьч объек-тов. Ф о р ь: у л а, н 3 с с i;:- т а в .; я Устройство .цля полунатурюго 1%;одсдг:... ровання, содержащее датчики параметре,в исследуемого объекта, которые через соотвэтств тощие усштнтели соеди;-: 11ы со входами блоко моделаровамия Kinia;/;ft- тической связи объекта с KoaoCvjcuuiMc.; основанием, один выход KOTOjJOio coe.miнен с первым входом сумматора, а соагветствующий аход и яругой вьр;сд под- {слючень: соответ-ственно к выходу и входу блока оптикшзаци, блок формирова-ния обратной передаточной фуы-л пг; зоз- будителя колебаний и усилитель мощности, вход которого подключен к выкоду сумматора, а соединен со аходом воабудите ая колебаний, которьш установлен на колеблМшемся основаник и на столе которого установлен датчик перема- щещш стола возбуд11теля колебаний, отличающееся тем, что, с цатью расширения об 1асти пркмекешш и увеличения точности рабс-ты, сно содержит элемент демпфяро1зония :: упругий элемент, 5х;тановлан 1ые мйж,пу ,:-йлощимся сснованизм. н стслск воооуд ггаль
колебаний, дополнительные усилители и датчик перемещения колеблющего основания, выход которого и выход датчика переметения стола возбудителя колебаний через соответствующие дополнительные усилители соединены с соответствуто щими входами блока моделирования связи объекта с колеблющимся основанием и блока формирования обратной передаточной функдии возбудителя 1:олебаний,
выход которого соедшнен со вторым вхдом сумматора,
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявка № 2300598/18-24,
.кл. G06G 7/48, 1975.
2,Авторское свидетельство СССР Мз 516057/кл. G06Q 7/48 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для полунатурного моделирования колебательных систем | 1980 |
|
SU922800A1 |
| Устройство для полунатурного моделирования | 1976 |
|
SU661567A1 |
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU947877A1 |
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU926683A1 |
| Устройство для моделирования виброударных механических систем | 1977 |
|
SU714420A1 |
| Устройство для моделирования колебательных систем | 1978 |
|
SU698014A1 |
| Устройство для полунатурного моделирования виброударных механических систем | 1983 |
|
SU1251116A1 |
| Устройство для моделирования статических и динамических характеристик привода координатно-шлифовального станка | 1983 |
|
SU1113817A1 |
