АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПРУЖИННЫХ ПРОТИВОУГОНОВ
Сущоств Ю1цсе оборудовгппк- д.чя iKiioTOii.ioiiiis-: пружшпп.-их проTHiicyroiiois, применяемых ;мя OMiieiicanni: рельсов жо.И З11одо|)()жног() no,K)Tii;i, является iie.iocinTdqno )ект11впым, тик кьк п.Иотовлепие противоу.гоиов ос 11;ост15.1яется на гилравлическнх i;, мехакически.х прессах, а па горизонта,ii)ii(,i-KOi5()4ni)ix машиi;ax. псдоетгггочио npiicnocoo.iciiiibix д.чя yroi ие.чп.
11ред,1а1аемЫ1 | .мат д.1я нзгото;. Кьня iip /кппных нротш ох гопов С1пес11ечи1 аст ) п)с)изв()днтс,п,пос11 счет того, что одним pi бочнм двнженпем HOiie e4Horo но.тзхна осхчпсств.чяет отрезку мерной згп отовкн, транснортнровкх ее ц Hejnsyio основную rii6i -.
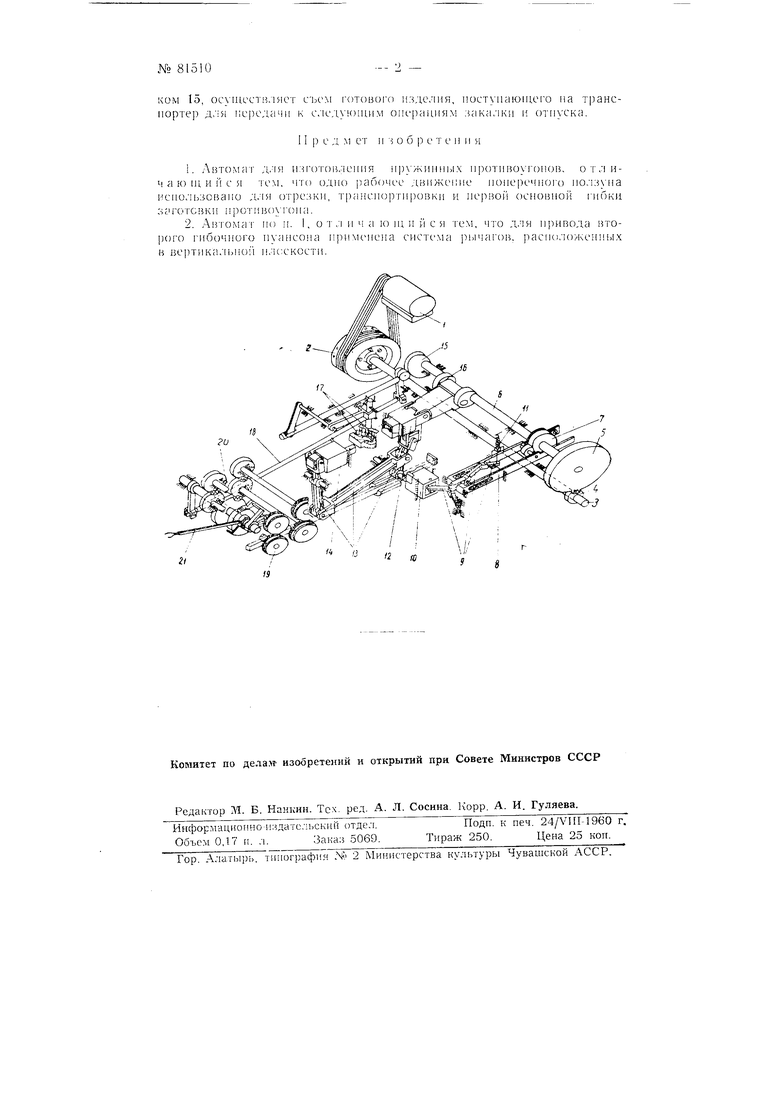
На чертеже изоб) кннематнчес1 ая схема автомата.
Автомат и.меет элсктродвщ-атсмь 1. со1 Д11Нснньп 1 посредством клпi.ope.MCHHoii передачи с маховнком 2, укрен,11Ч1Н1 1м на тем че)ез нкстернн 4 н о ispainennc к и 15.
Po.iHKOBbiii механизм 19 нпдачп де1 |ствн( юсредство.м KS от снабжен р KOjrrKoii вк,1н;чення 21. мать n.iH выключать нодач нр гка.
Ky.iaK 7 через н;1ан; н 8 н н1а.рннр| ыГ; лкханнзм 9 с ;1р 1 пнным 1;р|едох})аннте;1ем 11 сообщает нозвратно-ностх 1атсл1,1:ое двп 1хение 1|( 10. осушеств.чяюшему но в|1емя рабочего хода отрезку, транспорти|)овку н 1Ч1бк .заготовки. Ла.тьнеГпнг: гибка н высадка заготовки оеун1еств.)тся П(1.гз ч1амн 12 н 14, связанными между собой рычагамп 13 так, что загото15ка С1нбастся од1 онременно двумя но.гзуна.ми, а си, гибки iia бан1мак мат|1И11ы 16 не передается.
По окончании BTOpoii гибки и высадкн ио.т.лнь 12 и 14 отходят в нсходное но.тожение. а .мник 17. нр води иь:Г; н Д1 иженис к ла15, ocyiuccTB.iHOT съем готового изделия, поступающего на транспортер для передачи к еледуюпщм операппям закалки и отпуска.
Ире д м ет п з о б р с т е и п и
1.Летомат для и:- Готовле1П1я пружиппых протииоугопов, отличающийся тем. что одио рабочее движепие поперечиого ползупа иеиользова1 о для отрезки, транспортировки и первой осповиой шбки -saroTGBixii противоугоиа.
2.Автомат по п. 1, от л пча ю ш и и с я тем, что для привода второго гибочного nyaiicona при.мепепа система рычагов, расположенных и вертпка.тыю илсскостп.