t
Изобретение относится к системам автоматического регулирования и контроля перемещений, а именно к преобразователям переметений объекта в электрический сигнал с индикацией механических реэонансов.
Известно устройство для преобразования переметяений объекта в электрический сигнал, содержащее источник оптического излучения и позиционночувствительный фотоприемник, по/дслюченный к блоку обработки сигнала (ГО
Недостаток этого устройства состоит в невозможности преобразования перемещений объекта при высокодобротных резонансах, когда отраженный от исследуемого объекта луч выходит за пределы чувствительной поверхности позиционно-чувствительного фотоприемника.
Наиболее близким к предлагаемому по технической сущности является преобразователь перемещений объекта в электрический сигнал, содержгиций датчик виброперемещения, блок управления Объектом и соединенный с ним блок выделения ригнала рассогласования, н блок измерения амплитуды и частоты Ш.
Однако известному устройству присущи недостаточно высокая точность измерения перемещений и надежность контроля при высокодобротных, в том числе параметрических, резонансных эффектах и невозможность точного определения частоты резонанса. Например, при параметрических резонансах максимумы резонансных кривых вообще находятся «в области комбинационных частот и контролировать их с помощью известных устройств практически невозможно.
Кроме того при параметрическом резонансе на разностной частоте амплитуда может быть очень большой и может привести к неустойчивости в механической системе, что вызывает изменение в режиме работы из-за неустановившихся переходных процессов после прохождения резонанса. Поэтому наряду с определением резонансных частот необходимо исключить неустойчивость механической системы за счет автоматического включения обратной связи. Известное устройство не позволяет уменьшить влияние высокодобротных параметрических резонансов и имеет достаточно высокую погрешность при наличии линейных резонансов.
Цель изобретения - повышение точности измерения перемещений при низко добротных резонансах объекта и исключение неустойчивости при высокодобротных резонансах.
Поставленная цель достигается тем, что преобразователь перемещений в электрический сигнал снабжен измерителем скорости изменения огибающей резонансной кривой и двумя ключами, один вход первого ключа соединен с первым выходом датчика виброперемещения, а другой - с выходом измерителя скорости изменения огибающей резонансной кривой, выход первого ключа и второй выход датчика виброперемещения -г одключены к соответствующйм входам второго ключа, выход которого соединен с входом блока измерения амплитуды и частоты и с входом блока выделения сигнала рассогласования.
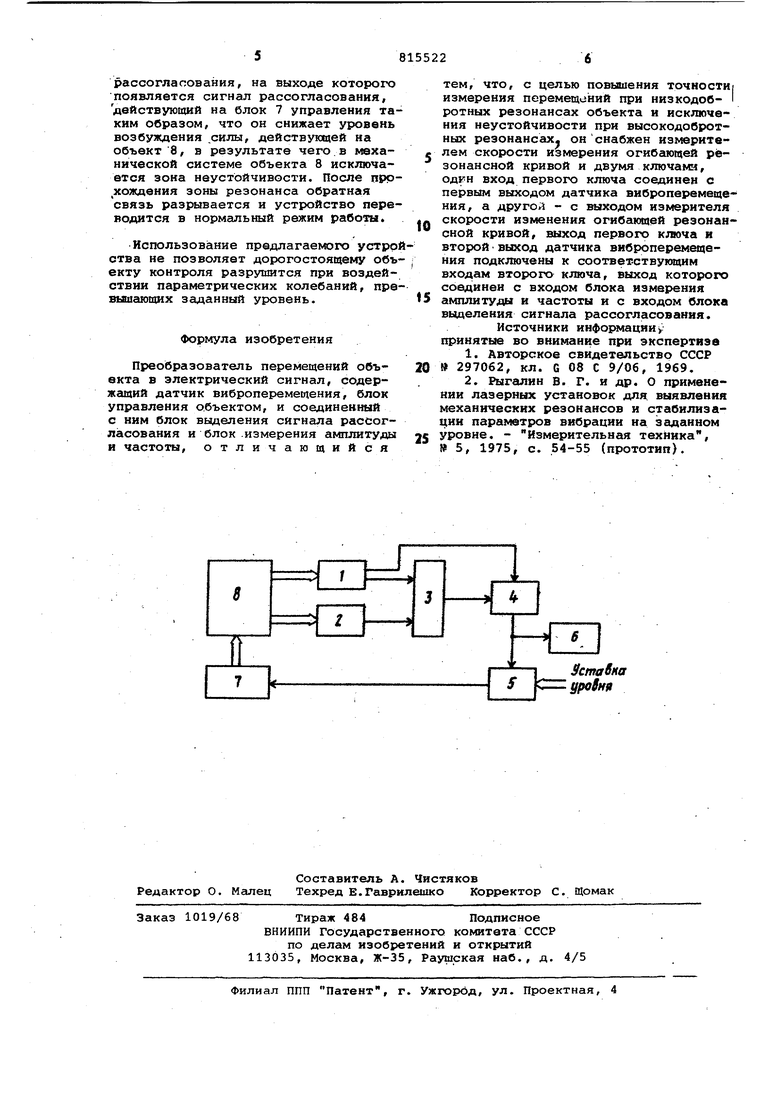
На чертеже приведена блок-схема предлагаемого устройства.
Преобразователь перемещений объекта в электрический сигнал содержит датчик 1 виброперемещения, измеритель 2 скорости изменения огибающей резонансной кривой, первый ключ 3, второй ключ 4, блок 5 выделения сигнала рассогласования, блок б измерения амплитуды и частоты, блок 7 управления объектом 8.
Датчик 1 виброперемещения может быть выполнен в виде источника излучения и фотоприемника, а измеритель 2 скорости изменения огибающей резонансной кривой может быть выполнен в виде оптического измерителя скорости .на эффекте Допплера. При таком выполнении датчика виброперемещения и измерителя скорости на исследуемый объект наносится отражающая поверх-, ность, на которую направляют луч источника излучения, например оптического квантового генератора. Отраженный луч несет информацию о движении объекта 8. Объект 8 совершает колебательное движение за счет воздействия на него знакопеременной силы, на пример от вибратора (на чертеже не показан).
Врбратор возбуждается от блока 7 управления, который соединен с блоком 5 вьщёления сигнала рассогласования, с помощью которого предотвращаются неустойчивость механической системы объекта при параметрических резонансах и переходные процессы.
Преобразователь работает следующи образом. ,
При перемещении объекта, подвергаемого воздействию внешней знакопеременной силы от вибратора на частотах далеких от собственных резонансов отдельных элементов объекта 8, сигналы снимаемые с датчика 1 виброперемещения и измерителя 2 скорости не открн вают первый ключ 3. При этом, второ
ключ 4 пропускает сигнал от датчика 1 виброперемещения к блоку 6 измерения амплитуды и частоты, который Фиксирует текущие значения этих параметров. Поскольку этот сигнал меньше уровня, устанавливаемого в блоке 5 выделения сигнала рассогласования, обратная связь разомкнута, он не воздействует на блок 7 управления, кото|зый обеспечивает заданный режим знакопеременной силы, воздействующей на объект 8.
При наличии в объекте 8 нелинейных механических связей между отдельными элементами в нем возникают резонансные эффекты. При этом наиболее часто
возникают линейные резонансы, а также параметрические резонансы на комбинационных частотах
ео5& i %нвш«. I
f -tгде . - частота возбуждения вибратора, задаваемая блоком 7 управления; fft.ia,,,, - частота внешней возбуждай)НсШН
5. {(вдей силы.
При приближении к резонансу сигнал с датчика 1 виброперемещения возрастает и второй ключ 4 насыщается и запирается. ПрИ резонансе напряжение 0 сигнала, снимаемого с датчика 1 виброперемещения становится максимальным, а напряжение сигнала, снимаемого с измерителя 2 скорости изменения огибакяцей резонансной кривой - равный 5 нулю. Эти сигналы поступают на входы первого ключа 3 и открывают его. В этот момент второй ключ 4 открывается и на блок 6 измерения амплитуды и частоты поступает сигнал с датчика 1 виброперемещения. Блок 6 регистрирует амплитуду и частоту сигнала точно в момент резонанса.
Если в объекте 8 возник линейный резонанс или параметрический резонанс на суммарной частоте f , то этот сигнал ниже уровня установки блока 5 выделения сигнала рассогласования, так как эти резонансы имеют невысокую добротность и не приводят к неустойчивости механической системы объекта 5 8. Эти резонансы регистрируются блоком б, но обратная связь разомкнута и сигнал с блока 5 выделения сигнала рассогласования отсутствует.
Блок 7 управления по-прежнему 5 обеспечивает заданный режим зкакопеременйой силы, воздействуклцей на объект .8.
Если же в механической системе объекта 8 возник параметрический резонанс на разностной частоте f.. , то 0 механическая система объекта, склонная к само воз буждени10| теряет устойчивость. Однако при этом сигнал с выхода первого ключа 3 возрастает настолько, что превышает уровень 5 уставки блока 5 выделения сигнала рассогласования, на выходе которого появляется сигнал рассогласования, действующий на блок 7 управления та ким образом, что он снижает уровень возбуждения .силы, действующей на объект 8, в результате чего в механической системе объекта 8 исключается зона неустойчивости. После прр хождения зоны резонанса обратная связь разрывается и устройство переводится в нормальный режим работ. Использование предлагаемого устро ства не позволяет дорогостоящему объ екту контроля разрушится при воздействии параметрических колебаний, пре вгллающих заданный уровень. Формула изобретения Преобразователь перемещений объекта в электрический сигнал, содержащий датчик виброперемещения, блок управления объектом, и соединенный с ним блок выделения сигнала рассогласования и блок .измерения амплитуды и частоты, отличающийся тем, что, с целью повышения точности) измерения перемещений при низкодоб- I ротных резонансах объекта и исключения неустойчивости при высокодобротных резонансах он снабжен измерителем скорости измерения огибёиощей резонансной кривой и двумя ключами, одкн вход первого ключа соединен с первым выходом датчика виброперемещения, а другсЛ - с выходом измерителя скорости изменения огибающей резонансной кривой, выход первого клоча и второйвыход датчика виброперемещения подключены к соответствующим входам второго ключа, выход которого соединен с входом блока измерения амплитуды и частоты и с входом блока вьаделения сигнала рассогласования. Источники информации/ принятые во внимание при экспертизе 1.Авторское свидетельство СССР 297062, кл. G 08 С 9/06, 1969. 2.Рыгалин В. Г. и др. О применении лазерных установок для выявления механических резонансов и стабилизации параметров вибрации на заданном уровне. - Измерительная техника, 5, 1975, с. 54-55 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения амплитудыМЕХАНичЕСКиХ КОлЕбАНий | 1979 |
|
SU853413A1 |
| Устройство для регулирования частоты колебаний платформы | 1978 |
|
SU752254A1 |
| Аналого-цифровое устройство для измерения амплитуды механических колебаний при резонансе | 1978 |
|
SU715939A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Устройство для снижения остаточных сварочных напряжений | 1977 |
|
SU673997A1 |
| Фотоэлектрический измеритель смещений | 1977 |
|
SU739610A2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ НАСТРОЙКИ КОЛЕБАТЕЛЬНОГО КОНТУРА | 1970 |
|
SU286000A1 |
| Ультразвуковой фазовый измеритель перемещений | 1990 |
|
SU1839230A1 |
| Устройство для измерения параметров вибрации | 1990 |
|
SU1805296A1 |
| Способ определения упруго-диссипативных характеристик древесины | 2019 |
|
RU2715222C1 |
Зставка
cmaoi Jen: gpofHf
