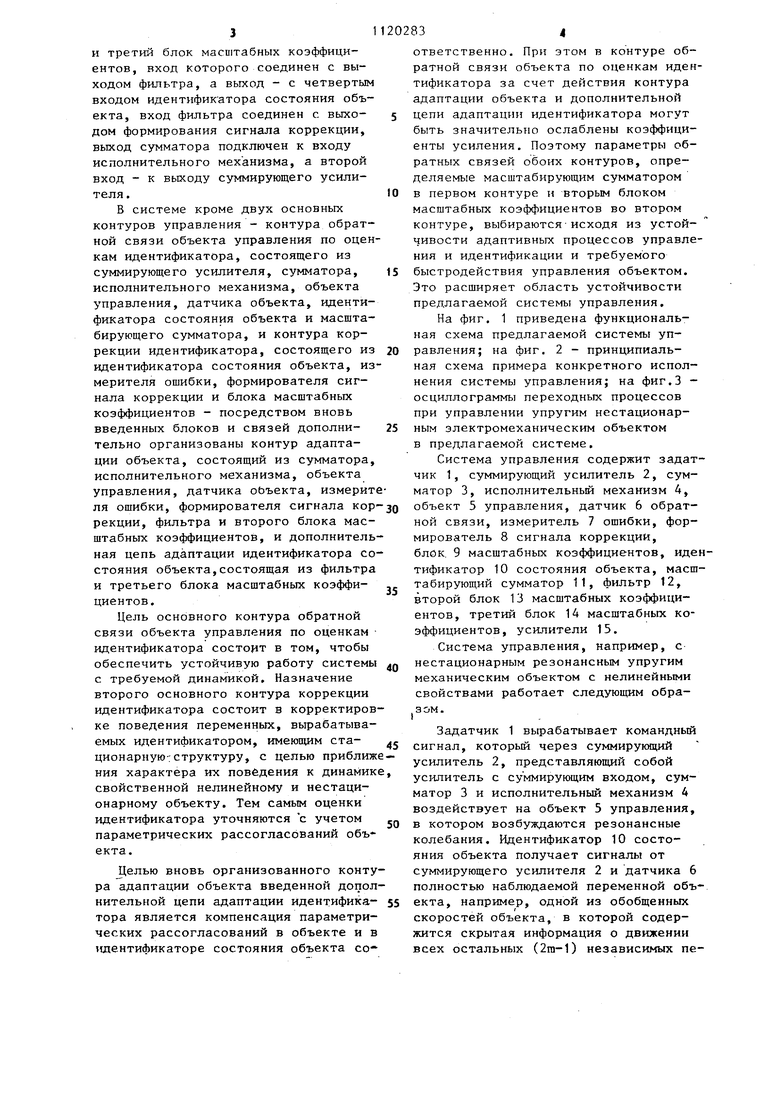
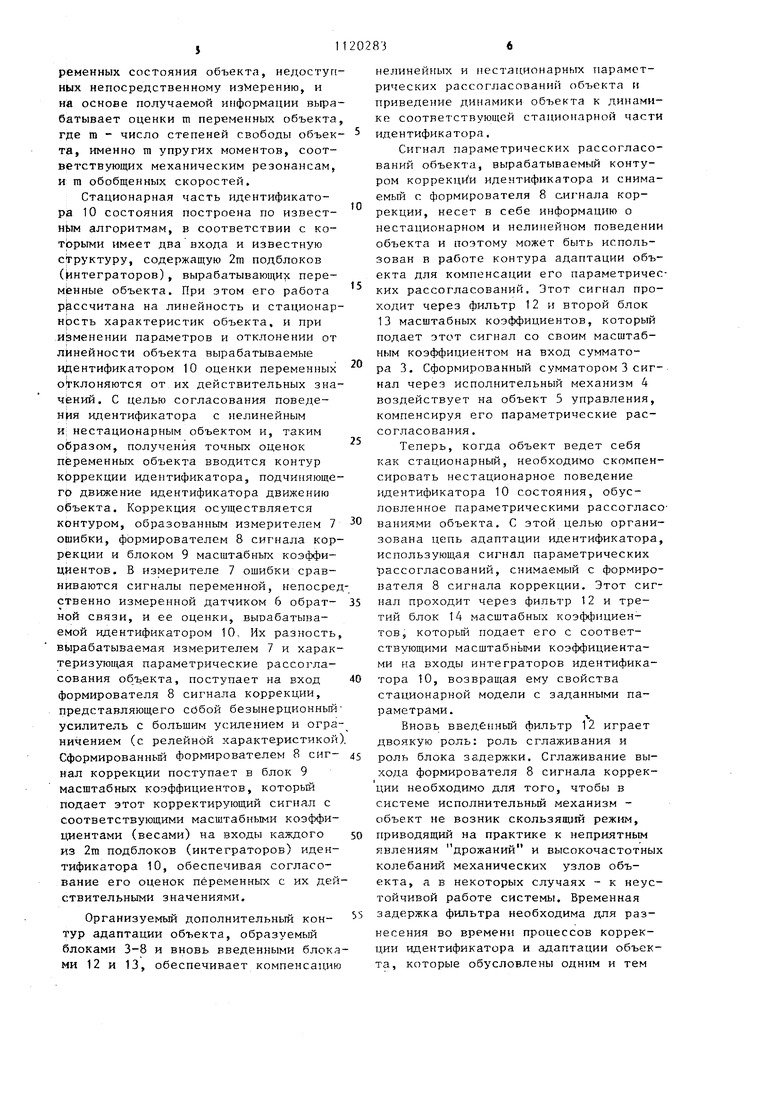
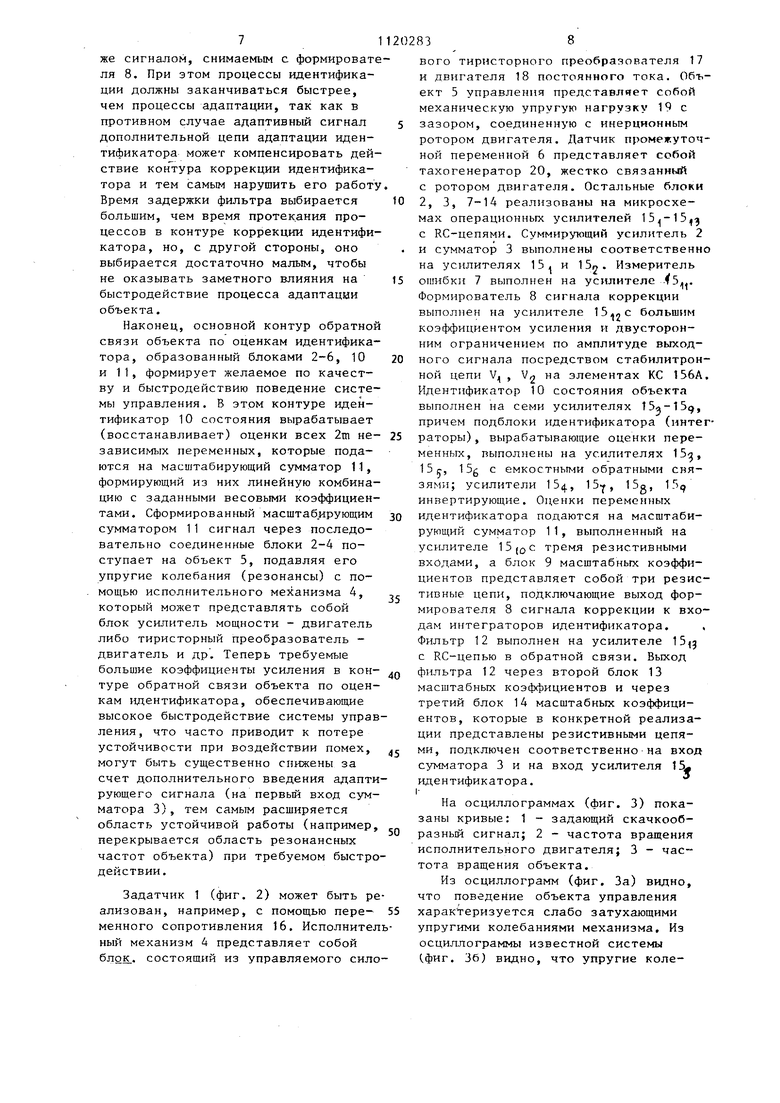
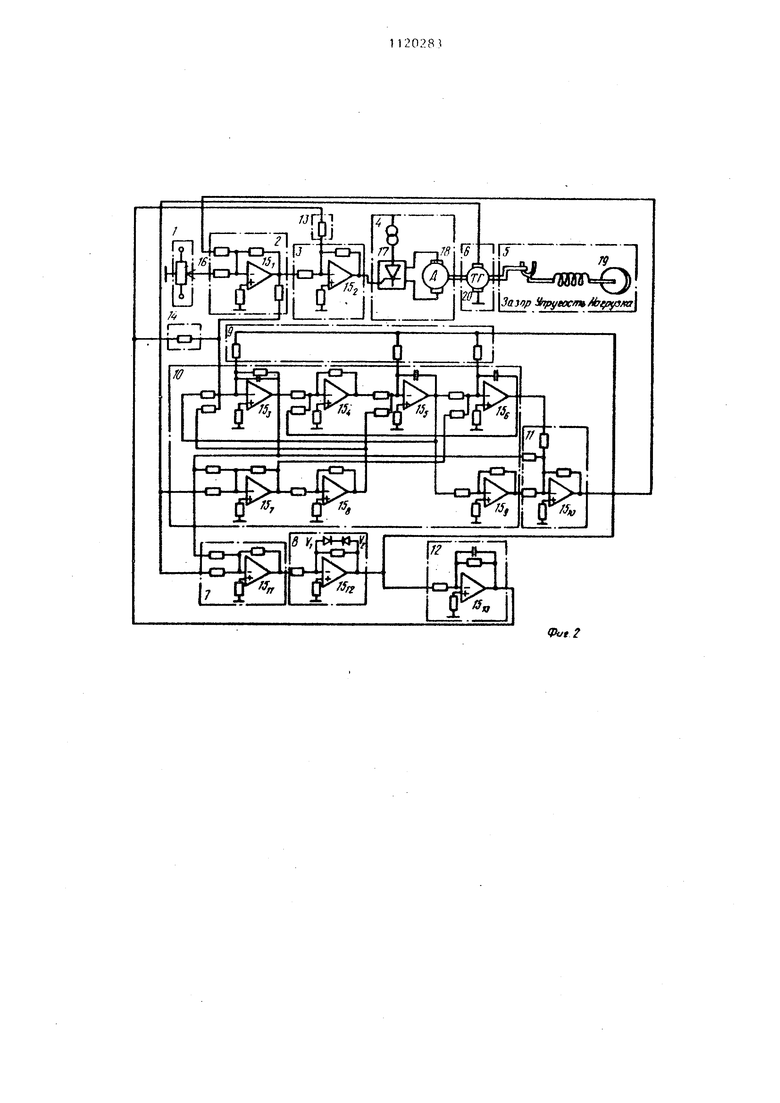
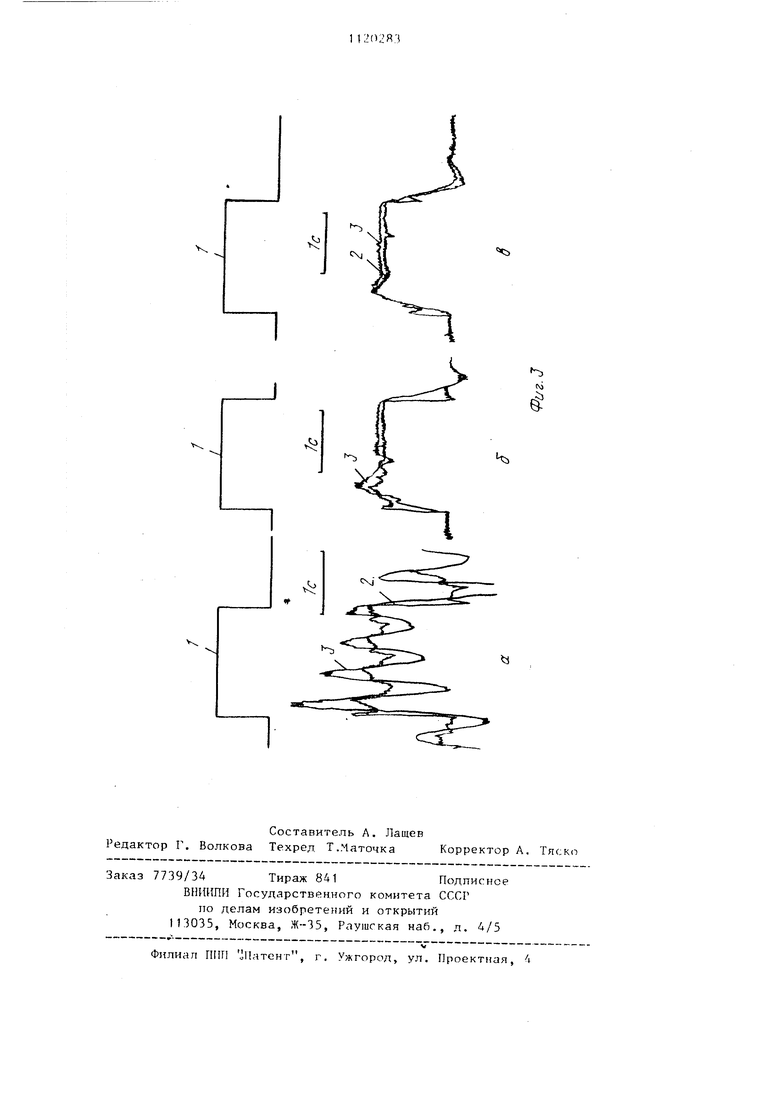
Изобретение относится к (1матическому управлению и может быть использовано для управления электромехпническнми объектами, в т.ч. нестационарными, многомассовыми с упругими связями, не все переменн 1е которо го доступны измерению с помощью датчиков, например, в системах управления исполннтельныпи органами механизмов роботов, металлорежущих станков, бортовых радиолокационных станций и др. Изнестны следящие системы, содержащие последовательно соединенные из меритель рассогласования, регулирова ния, вход и выход которого соединены ;с соответствующими входами устройства для измерения текущих динамичес ких характеристик нестационарного об екта (идентификатором), выход которо го соединен с вторьпи входом регулято ра 1. Известны также следящие систем, содержащие последовательно соединенные задатчик, измеритель рассогласов ния, регулятор и объект, выход которого соединен с первым входом суммат ра, второй вход которого через эталонную модель соединен с выходом задатчика, а выход через устройство уп равления с бесконечно большим коэффи циентом усиления и ограничения соеди нен с вторым входом регулятора. В та кой системе сравнивают реальные выХодньге координаты объекта с желаемыми а по их разности формируется дополнительньй сигнал управления 2J . Однако в данных системах лаже при незначительных изменениях параметров объекта ухудшается качество динамиче ких процессов, тем более в реальных условиях работы системы, когда параметры объектов управления значительно изменяются в функции координат и времени, нелинейные и нестационарные параметрические рассогласования могут привести к потере устойчивости. Наиболее близкой к предложенной является система управления объектом содержащая последовательно соединенный задатчик, гуммирующий усилитель, исполнительный механизм, объект управления, датчик объекта, идентификатор состояния объекта и масштабирующий сумматор, выход которого соединен с вторым входом суммируюп1его усилителя, а выход последнего соед нен с вторым входом идентификатора состояния оОт.екта. С цепью сохранения работоспособности идентификатора состояния , я следовательно, и всей системы автоматическогс управления при изменении параметров об1)екта, в нее дополнительно введены последовательно соединенные измеритель ошибки, формирователь сигнала коррекции и блок масщтабных коэффициентов, выход которого соединен с третьим входом идентификатора, а входы измерителя ошибки подключены к второму выходу идентификации и к датчику объекта з . Однако в известной системе управления при значительном изменении параметров объекта и/или при их изменении со скоростями, сравнимыми с быстродействием основного контура управления по ошибке, а также цри существенном влиянии нелинейностей объекта область устойчивости системы .управления сужается. Кроме того, при больших параметрических рассогласованиях требуется значительное усиление в контуре обратной связи объекта по оценкам идентификатора состояния, что может привести к ухудшению и даже нарушеЕ1ию работоспособности системы управления в условиях всегда имеющих место помех. Целью изобретения является повьпиеыие устойчивости системы управления при значительных нелинейных и нестационарных параметрических рассогласованиях объекта управления и действии помех. Поставленная цель достигается тем, что в систему управления, содержащую последовательью соединенные задатчик и суммирующий усилитель и последовательно соединенные исполнит ельный механизм, объект управления, датчик обратной связи, измеритель ошибки, формирователь сигнала коррекции, первый блок масштабных коэффициентов, идентификатор состояния объекта и масштабирующий сумматор, выход которого соединен с вторым входом суммирующего усилителя, выходом соединенного с вторым входом идентификатора состояния объекта, третий вход которого подключен к датчику обратной связи, а второй выход соединен с вторым входом измерителя ошибки, дополнительно последовательно сорпин(м)ные фильтр, вт.ро; блок мп.-Птч-тных колфГ иц.еч счр , глммлтс р 3 и третий блок масп1табных коэффициентов, вход которого соединен с выходом фильтра, а выход - с четвертым входом идентификатора состояния объекта, вход фильтра соединен с выходом формирования сигнала коррекции, выход сумматора подключен к входу исполнительного механизма, а второй вход - к выходу суммирующего усилителя. В системе кроме двух основных контуров управления - контура обратной связи объекта управления по оцен кам идентификатора, состоящего из суммирующего усилителя, сумматора, исполнительного механизма, объекта управления, датчика объекта, идентификатора состояния объекта и масштабирующего сумматора, и контура коррекции идентификатора, состоящего из идентификатора состояния объекта, из мерителя ошибки, формирователя сигнала коррекции и блока масштабных коэффициентов - посредством вновь введенных блоков и связей дополнительно организованы контур адаптации объекта, состоящий из сумматора, исполнительного механизма, объекта управления, датчика объекта, измерит ля ошибки, формирователя сигнала кор рекции, фильтра и второго блока масштабных коэффициентов, и дополнитель ная цепь адаптации идентификатора со стояния объекта,состоящая из фильтра и третьего блока масштабных коэффициентов. Цель основного контура обратной связи объекта управления по оценкам идентификатора состоит в том, чтобы обеспечить устойчивую работу системы с требуемой динамикой. Назначение второго основного контура коррекции идентификатора состоит в корректиров ке поведения переменных, вырабатываемых идентификатором, имеющим стационарную:структуру, с целью приближ ния характера их поведения к динамик свойственной нелинейному и нестационарному объекту. Тем самым оценки идентификатора уточняются Ъ учетом параметрических рассогласований объекта. Целью вновь организованного конту ра адаптации объекта введенной допол нительной цепи адаптации идентификатора является компенсация параметрических рассогласований в объекте и в щентификаторе состояния объекта со- 83 ответственно. При этом в контуре обратной связи объекта по оценкам идентификатора за счет действия контура адаптации объекта и дополнительной цепи адаптации идентификатора могут быть значительно ослаблены коэффициенты усиления. Поэтому параметры обратных связей обоих контуров, определяемые масштабирующим сумматором в первом контуре и вторым блоком масштабных коэффициентов во втором контуре, выбираются исходя из устойчивости адаптивных процессов управления и идентификации и требуемого быстродействия управления объектом. Это расширяет область устойчивости предлагаемой системы управления. На фиг. 1 приведена функциональная схема предлагаемой системы управления; на фиг. 2 - принципиальная схема примера конкретного исполнения системы управления; на фиг.З - осциллограммы переходных процессов при управлении упругим нестационарным электромеханическим объектом в предлагаемой системе. Система управления содержит задатчик 1, суммирующий усилитель 2, сумматор 3, исполнительный механизм 4, объект 5 управления, датчик 6 обратной связи, измеритель 7 ошибки, формирователь 8 сигнала коррекции, блок. 9 масштабных коэффициентов, идентификатор 10 состояния объекта, масштабирующий сумматор 11, фильтр 12, второй блок 13 масштабных коэффициентов, третий блок 14 масштабных коэффициентов, усилители 15. Система управления, например, с нестационарным резонансным упругим механическим объектом с нелинейными свойствами работает следующим образом. Задатчик 1 вырабатывает командный сигнал, который через суммирукмзцй усилитель 2, представляющий собой усилитель с суммирующим входом, сумматор 3 и исполнительный механизм 4 воздействует на объект 5 управления, в котором возбуждаются резонансные колебания. Идентификатор 10 состояния объекта получает сигналы от суммирующего усилителя 2 и датчика 6 полностью наблюдаемой переменной объекта, например, одной из обобщенных скоростей объекта, в которой содержится скрытая информация о движении всех остальных (2т-1) независимых переменных состояния объекта, недоступ ных непосредственному измерению, и на основе получаемой информации выра батывает оценки m переменных объекта где m - число степеней свободы объек та, именно га упругих моментов, соответствующих механическим реэонансам, и m обобщенных скоростей. Стационарная часть идентификатора 10 состояния построена по известным алгоритмам, в соответствии с котЬрыми имеет два входа и известную структуру, содержащую 2т подблоков (Интеграторов), вырабатывающих переменные объекта. При этом его работа рассчитана на линейность и стационар нрсть характеристик объекта, и при ,Изменении параметров и отклонении от линейности объекта вырабатываемые идентификатором 10 оценки переменных огклоняются от их действительных зна чений, С целью согласования поведения идентификатора с нелинейным и; нестационарным объектом и, таким образом, получения точных оценок переменных объекта вводится контур коррекции идентификатора, подчиняюще го движение идентификатора движению объекта. Коррекция осу цествляется контуром, образованным измерителем 7 ошибки, формирователем 8 сигнала кор рекции и блоком 9 масштабных коэффициентов, В измерителе 7 ошибки сравниваются сигналы переменной, непосре ственно измеренной датчиком 6 обратной связи, и ее оценки, вырабатываемой идентификатором 10, Их разность вырабатываемая измерителем 7 и харак теризующая параметрические рассогласования , поступает на вход формирователя 8 сигнала коррекции, представляющего собой безынерционный усилитель с большим усилением и огра ничением (с релейной характеристикой Сформированньй формирователем 8 сигнал коррекции поступает в блок 9 масштабных коэффициентов, который подает этот корректирующий сигнал с соответствующими масштабными коэффициентами (весами) на входы казкдого из 2т подблоков (интеграторов) идентификатора 10, обеспечивая согласование его оценок переменных с их дей ствительными значениями. Организуемый дополнительный контур адаптации объекта, образуемый блоками 3-8 и вновь введенными блока ми 12 и 13, обеспечивает компенсацию нелинейргых и нестационарных параметрических рассогласований объекта и приведение динамики объекта к динамике соответствующей стационарной части идентификатора. Сигнал параметрических рассогласований объекта, вырабатываемый контуром коррекции идентификатора и снимаемьш с формирователя 8 сигнала коррекции, несет в себе информацию о нестационарном и нелинейном поведении объекта и поэтому может быть использован в работе контура адаптации объекта для компенсации его параметрических рассогласований. Этот сигнал проходит через фильтр 12 и второй блок 13 масштабных коэффициентов, который подает этот сигнал со своим масштабным коэффициентом на вход сумматора 3, Сформированный сумматором 3 сигнал через исполнительный механизм 4 воздействует на объект 5 управления, компенсируя его параметрические рассогласования , Теперь, когда объект ведет себя как стационарный, необходимо скомпенсировать нестационарное поведение идентификатора 10 состояния, обусловленное параметрическими рассогласованиями объекта, С этой целью организована цепь адаптации идентификатора, использующая сигнал параметрических рассогласований, снимаемый с формирователя 8 сигнала коррекции. Этот сигнал проходит через фильтр 12 и третий блок 14 масштабных коэффициентов, которьш подает его с соответствующими масштабнь1ми коэффициентами на входы интеграторов идентификатора 10, возвращая ему свойства стационарной модели с заданными параметрами. Вновь введЁнный фильтр 12 играет двоякую роль: роль сглаживания и роль блока задержки. Сглаживание выхода формирователя 8 сигнала коррекции необходимо для того, чтобы в системе исполнительный механизм объект не возник скользящий , приводящий на практике к неприятным явлениям дрожаний и высокочастотных колебаний механических узлов объекта, а в некоторых случаях - к неустойчивой работе системы. Временная задержка фильтра необходима для разнесения во времени процессов коррекции идентификатора и адаптации объекта, которые обусловлены одним и тем же сигналом, снимаемым с формировате ля 8. При этом процессы идентификации должны заканчиваться быстрее, чем процессы адаптации, так как в противном случае адаптивный сигнал дополнительной цепи адаптации идентификатора может компенсировать действие контура коррекции идентификатора и тем самым нарушить его работу Время задержки фильтра выбирается большим, чем время протекания процессов в контуре коррекции идентификатора, но, с другой стороны, оно выбирается достаточно малым, чтобы не оказывать заметного влияния на быстродействие процесса адаптации объекта. Наконец, основной контур обратной связи объекта по оценкам идентификатора, образованный блоками 2-6, 10 и 11, формирует желаемое по качеству и быстродействию поведение системы управления. В этом контуре идентификатор 10 состояния вырабатывает (восстанавливает) оценки всех 2т независимых переменных, которые подаются на масштабирующий сумматор 11, формирующий из них линейную комбинацию с заданными весовыми коэффициентами. Сформированный масштабирующим сумматором 11 сигнал через последовательно соединенные блоки 2-4 поступает на объект 5, подавляя его упругие колебания (резонансы) с помощью исполЕ1ительного механизма 4, который может представлять собой блок усилитель мощности - двигатель либо тиристорный преобразователь двигатель и др. Теперь требуемые большие коэффициенты усиления в контуре обратной связи объекта по оценкам идентификатора, обеспечивающие высокое быстродействие системы управ ления, что часто приводит к потере устойчивости при воздействии помех, могут быть существенно снижены за счет дополнительного введения адапти рующего сигнала (на первый вход сумматора 3}, тем самым расширяется область устойчивой работы (например, перекрывается область резонансных частот объекта) при требуемом быстро действии. Задатчик 1 (фиг. 2) может быть ре ализован, например, с помощью переменного сопротивления 16. Исполнител ный механизм 4 представляет собой блок,, состоящий из управляемого сило вого тиристорного преобразователя 17 и двигателя 18 постоянного тока. Объект 5 управления представляет собой механическую упругую нагрузку 19 с зазором, соединенную с инерционным ротором двигателя. Датчик промежуточной переменной 6 представляет собой тахогенератор 20, жестко связанный с ротором двигателя. Остальные блоки 2, 3, 7-14 реализованы на микросхемах операционных усилителей ,-j с КС-цепями. Суммирующий усилитель 2 и сумматор 3 выполнены соответственно на усилителях 15 и 1Зо. Измеритель ошибки 7 выполнен на усилителе ,.. Формирователь 8 сигнала коррекции выполнен на усилителе большим коэффициентом усиления и двусторонним ограничением по амплитуде выходного сигнала посредством стабилитронной цепи Vj, , Vg на элементах КС 156А. Идентификатор 10 состояния объекта выполнен на семи усилителях ISo-IS, причем подблоки идентификатора (интеграторы) , вырабатывающие оценки переменных, выполнены на усилителях 15, 15 у, 15g с емкостными обратными связями; усилители 154, -Т 8 инвертирующие. Оценки переменных идентификатора подаются на масштабирующий сумматор 11, выполненный на усилителе 15(оС тремя резистивными входами, а блок 9 масштабных коэффициентов представляет собой три резистивные цепи, подключающие выход формирователя 8 сигнала коррекции к входам интеграторов идентификатора. , Фильтр 12 выполнен на усилителе 13 с RC-цепью в обратной связи. Выход фильтра 12 через второй блок 13 масштабных коэффициентов и через третий блок 14 масштабных коэффициентов, которые в конкретной реализации представлены резистивными цепями, подключен соответственно на вход сумматора 3 и на вход усилителя 15 идентификатора. IНа осциллограммах (фиг. 3) показаны кривые: 1 - задающий скачкообразный сигнал; 2 - частота вращения исполнительного двигателя; 3 - частота вращения объекта. Из осциллограмм (фиг. За) видно, что поведение объекта управления характеризуется слабо затухающими упругими колебаниями механизма. Из осциллограммы известной системы (.фиг. 36) видно, что упругие коле1бания подавляются, хотя между поведением нагрузки объекта (кривая 3) и исполнительным механизмом (кривая 2 наблюдается значительное рассогласование, увеличивающееся при изменении параметров объекта, что характеризует узкую область устойчивости. В предлагаемой системе управления (фиг. Зв) эффективно подавляются колебания двухмассового объекта при сохранении быстродействия и формы перёходньпс процессов, соответствующих техническим оптимальным предписанияЦ, а быстродействие системы отвечает полосе пропускания, перекрывакяцей область резонансных частот. При этом поведение нагрузки (кривая 3) близко к поведению исполнительного двигателя (кривая 2), и указанная картина перехйдных процессов сохраняется при налйчии зазора, а также при изменении параметров объекта, например собственной частоты вращения в 2-4 раза, суммарного момента инерции в 3-6 раз Таким образом, в предложенной системе расширяется область устойчивости. Примером использования предложенной системы управления могут служить исполнительные органы механизмов промьшшенных роботов, которые описываются кик нестационарные двухмассовые объекты с упругими связями. В качестве базового объекта выбрана типовая система управления следящих электроприводов исполнительных органов манипуляционных роботов. Выбранная за базовый объект система управления применяется в новейших разработках роботов, построенных по модульному принципу, и отвечает со3.10 временному уровню развития робототехнической промышленности. Она обеспечивает технически оптимальное по быст родействию (программируемое) движение манипулятора при условии идеализации его конструкции как абсолютно твердо1о тела. Однако современные типы манипуляторов работают в области частот, где начинают про.являться упругие свойства механической конструкции. Техническим преимуществом предлагаемой системы управления является введение новых блоков и связей, подавление колебаний механической конструкции манипулятора при сохранении требуемого быстродействия, отвечающего полосе пропускания, перекрывающей область резонансных частот, а также при изменении параметров объекта, что приводит к расширению области устойчивости предлагаемой системы управления по сравнению с базовым объектом. В результате достигаемых технических преимуществ в предлагаемой системе управления повышается точность, а также производительность (на 10-15%) манипуля.тора за счет снижения времени позиционирования. Ожидаемый экономический эффект от использования предлагаемой системы управления рассчитан в сравнении его с базовой системой на примере обработки детали валика ПВ8304017 на двух токарных станках УТ1683, обслуживаемых роботом-манипулятором. Годовой экономический эффект на единицу оборудования составляет 26 тыс.821 руб.
V,
Ч
f-3
(t
4i
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532719C1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| Система управления | 1991 |
|
SU1792539A3 |
СИСТЕМА УПРАВЛЕНИЯ, содержащая последовательно соединенные за- ; датчик и суммирующий усилитель и последовательно соединенные исполнительный механизм, объект управления, датчик обратной связи, измеритель ошибки, формирователь сигнала коррекции, первый блок масштабных коэффициентов, рщентификатор состояния объекта и масштабирующий сумматор, выход которого соединен с вторым входом суммирующего усилителя, соединенного выходом с вторым входом идентификатора состояния объекта, третий вход которого подключен к датчику обратной связи, а второй выход соединен с вторым входом измерителя ошибки, отличающаяся тем, что, с целью повышения устойчивости системы, в нее введены последовательно соединенные фильтр, второй блок масштабных коэффициентов, сумматор и третий блок масштабных коэффициентов, § вход которого соединен с выходом (Л фильтра, а выход - с четвертым входом идентификатора состояния объекта, вход фильтра соединен с выходом формирователя сигнала коррекции, выход сумматора подключен к входу исполнительного механизма, а второй вход - к выходу суммирующего усилителя .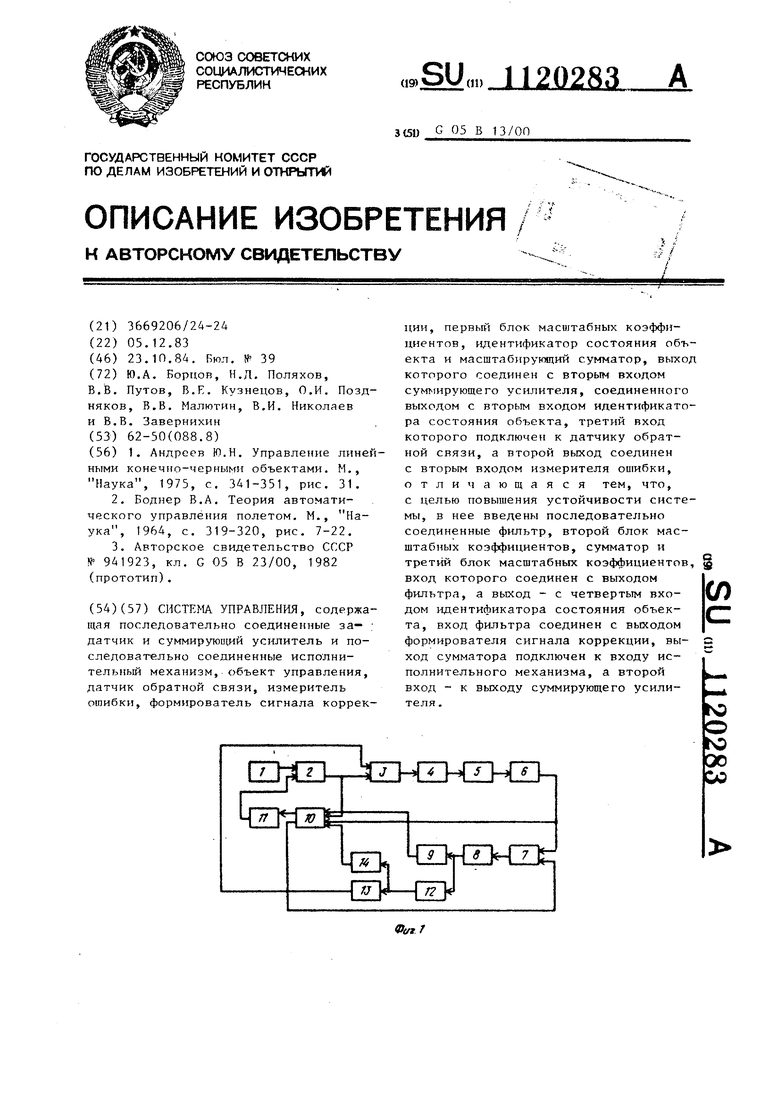
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Андреев Ю.Н | |||
| Управление линейными конечно-черными объектами | |||
| М., Наука, 1975, с | |||
| Кардочесальная машина | 1923 |
|
SU341A1 |
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Теория автоматического управления полетом | |||
| М., Наука, 1964, с | |||
| Прибор для определения при помощи радиосигналов местоположения движущегося предмета | 1921 |
|
SU319A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
