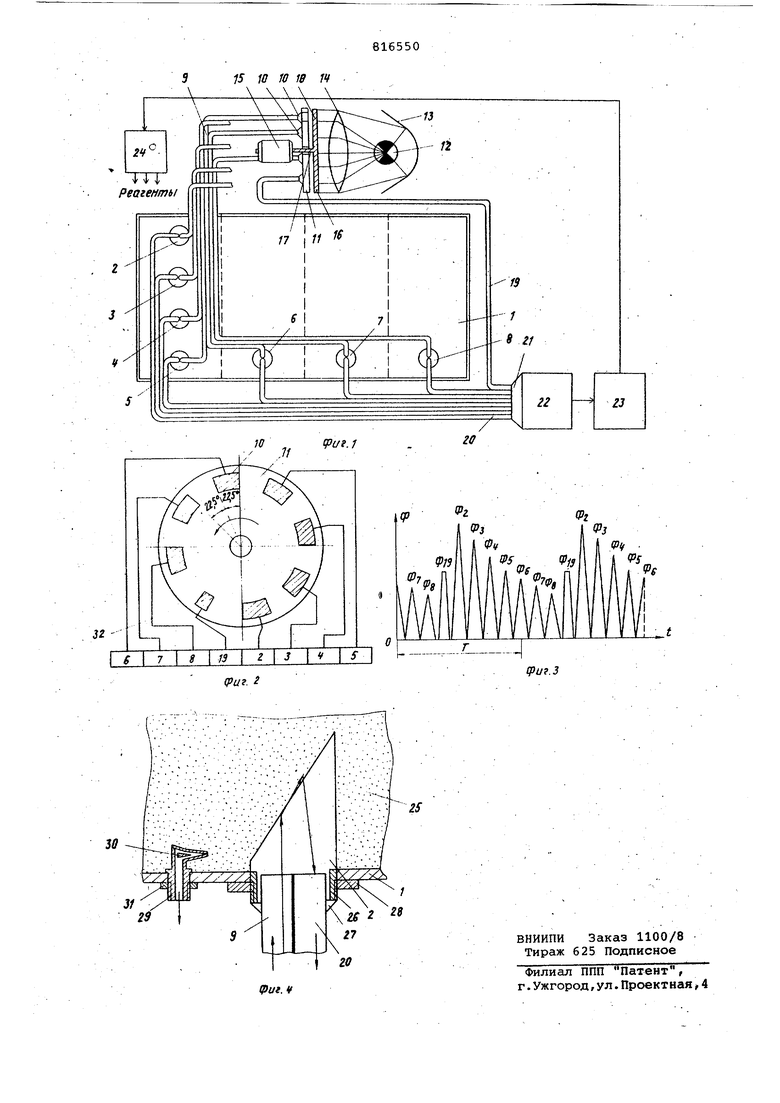
Изобретение относится к автомати ческому регулированию процессами флотации, регулированию расхода пенообразователя и реагента-собирателя в угольных флотационных машинах И может быть использовано в угольной и горнорудной промышлен ности. Известен способ управления флотационной машиной посредством непрерывного измерения количества переливающейся пены (или измерения количества пены с помощью емкостного датчика, установленного в машине над переливным порогом для пены), по которому .регулируют расход реагентов и аэрацию пульпы, или переливной порог З Основным недостатком известного способа является низкая точность регулирования вследствие отсутстви информации о физических параметрах флотопульпы. . Известен способ автоматического регулирования процесса флотации, основанный на измерении отражательн способности пульпы и коррекции удел ного расхода флотореагентов, устрой ство для реализации которого вычисл тельный блок, датчики отражательной способности и дозатор реагентов 2 ., Недостатком известного способа и устройства является зависимость отраженного от поверхности пульпы света не только от зольности пульпы, но также и от колебаний неровностей поверхности поэтому точность измерения зольности хвостов флотации невысока и составляет до 3,5 абс.% по зольности .Кроме того, известные способ и устройство используют лишь сигнал о качестве одного из продук тов флотации на выходе флотомашины и совсем не используют информацию о динамике происходящих в самой флотомашине процессов. Вследствие этого способ и устройство имеют низ кую точность регулирования. Цель изобретения - повышение точ. ности регулирования. Указанная цель достигается тем, что измеряют текущие значения величин относительных градиентов отража тельной способности пульпы по высоте и фронту камер и удельный расход флотореагентов корректируют в зави,симости от измеренных величин. С этой целью устройство для осуществления предлагаемого способа дополнительно снабжено двумя группами волоконнооптических датчиков отражательной способности пульпы, осветителем с модулятором и фотоумножителем, причем датчики групп соединены с осветителем и фотоумножителем гибкими волоконнооптическими световодами, при этом первая группа датчиков установлена по высоте камер флотомашины, а вторая группа датчиков установлена по фронту. Кроме того, для повьашения метрологической надежности датчики отражательной способности снабжены очистителями , выполненными в виде форсу нок, соединенных между собой общей магистралью, которая периодически подключается к водяной магистрали шлсокого давления. На фиг.1 приведена блок-схема устройства для автоматического рагулирования процесса флотации; на фиг.2 - расположение светоприемных фоконов в диске осветителя и схема их соединения .с волоконнооптическими датчиками отражательной способности пульпы (ВДОСП) с помощью ГВС на фиг.З - временная диаграмма световых потоков Ф в различных ГВС} на фиг.4 - установка ВДОСП и форсунк на стенке камеры флотомашины. Устройство автоматического регулирования (фиг.1) содержит установленные на флотомашине 1 датчики ВДО 2-8, которые с помощью ГВС 9 соедин ны с соответствующими светоприемными. фоконами 10, установленными в свето непроницаемом диске 11 с осевым отверстием. Осветитель состоит из лам почки 12, сзсщи которой установлено вогнутое зеркало 13, а перед лампочкой установлена конденсаторная линза 14, с помощью которых осущест ляется равномерное совещание диска 11 и всех восьми установленных на н светоприемнйх фоконов 10, каждый из которых со стороны лампочки имеет форму сектора кольца (фиг.2) и соединен с соответствующим ВДОСП, элек родвигатель 15, обтюратор 16, установленный на выходном валу 17. Обтюратор имеет окошко 18, форма и размеры которого соответствуют форм и размерам светоприемного фокона со стороны лампочки. Один из светопри емных фоконов имеет меньшую площадь нежели остальные семь фоконов {у не го, например, вдвое меньше централь ный угол сектора, равный 12,25° вме то 22,bj и с помощью ГВС 19 и 20,со динен непосредственно с светопереда 5дим. фоконом 21 (фиг.2), который передает све также от ВДОСП 2-8 чере ГВС 20 к фотоумножителю 22, выход которого соединен со входом вычислительного блока 23. Выход вычислительного блока 23 соединен с дозатором флотореагентов 24. Волоконнооптический датчик, отражательной способности пульпы 25 выполнен в виде срезанного наискось цилиндра из оптически прозрачного материала (фиг.4). С помощью арматуры 26 с наружной резьбой, уплотнителем 27 и гайки 28 цилиндр 2 закрепляется на стенке камеры флотомашины так, что цилиндр находится внутри флотомашины. Сочлененные опти-чески с цилиндром 2 с помсяцью уплотнителя 27 в арматуре закрепляется входной ГВС-9 и выходной ГВС 20. Рядом с ВДОСП установлена форсунка 29 с игольчатым клапаном 30, которая с помощью гайки 31 крепится на стенке камеры флотомашины. Устройство работает следующим образом. Свет от лампочки 12 через окошко 18 падает на светоприемный фокон 10 и по ГВС;9 передается на ВДОСП. Угол среза цилиндра 2 выбран таким, чтобыугол падения светового луча из ГВС 9 на плоскость среза был больше угла полного внутреннего отражения. При этом луч света из ГВС 9 попадает на плоскость среза и переходит в пуль пу 25, где претерпевает диффузионное рассеяние. Отражательная способность пульпы линейно увеличивается с рос-. том зольности твердой мелочи в ней. После рассеяния в пульпе часть света попадает обратно в цилиндр 2 и на ГВС 20. По ГВС 20 свет передается через фокон 21 на фотокатод фотоумножителя 22. При работе обтюратора 16, который равномерно вращается с помощью электродвигателя 15, через окошко 18свет поочередно через фоконы и ГВС попадает на различные датчики либо через один из фоконов 10 и ГВС 19непосредственно на катод фотоумножителя. На фиг.З приведена временная диагралала -световых потоков Ф в различных ВВС 19 и 20. На выходе фотоумножителя йаблюдается аналогичная временная диаграмма- тока с тем же периодом Т. Вычислительное устройство определяет величины относительных градиентов отражательной способности пульпы по высоте камеры, пропорциЬнальные .-Ф,,-. «4-. 19 Ю 19 аналогично по пути следования пульпы: ,д Ф, 19 В процессе наладки устройства на флотомашине определяют значимость ве. совые коэффициенты всех относительных градиентов. К2 3 К .5 / .К 5,6 t К-г.з и вводят эти величины в вычислительный блок, который затем при работе флотомашины выдает два значения взвешенных относительных градиентов отражательной способ ности пульпы по высоте камеры Г и по пути следования пуЛьпы Г„: ,.Л-Ф,)К,,1Фг , Ля . в зависимости от вычисленных значеНИИ относительных градиентов вычислительный блок 23 вьщает управляющи сигналы на дозатор флотореагентов 24, который реагирует удельные расходы реагента-собирателя и пенообра зователя. Из формул (.1) и (2) видно, что значение г и Г не изменяется, если изменится яркость лампочки или эффективность фотоумножителя, так ка при этом в одинаковое число раз изменятся все потоки Ф (или токи с фотоумножителя). Таким образом, регулирование расхода флотореагентов по значениям относительных градиентов Гц и Tfj не зависит от всех апп ратурных нестабильностей, включая одинаковое залипание всех ВДОСП. Ес ли же разные ВДОСП залипанэт по разному, то вычислительные значения Tg и Fq изменятся. Для предотвращения этой погрешности датчики ВДОСП снаб жены очистителями периодического действия, например, в виде установленных около датчиков ВДОСП форсунок, соединенных между собой общей магистралью, которая периодически подключается к водяной магистрали высокого давления. Периодичность и длительность подвключения зависит от интенсивности залипания цилиндров 2. Подключение магистрали форсунок к водяной магистрали высокого давления осуществляется сигналом с вычислительного блока. Ввиду дешевизны и малых габаритов ВДОСП они могут устанавливаться в любом количестве в произвольны местах камер флотомашины. В больших флотационных машинах могут быть уст новлены датчики по высоте камеры в нескольких камерах и тогда в вычислительном блоке будут определяться несколько относительных градиентов по высоте Гц и их среднее значение Гц . Аналогично могут быть установлены ряды датчиков на разных уровних по пути следования пульпы по камерам флотомшнины.. Предлагаелййй способ позволяет непрерывно регулировать расход флотореагентов по динамике процесса обогащения мелочи в флотомашине. .Регулирование расхода по величинам относительных градиентов Г и Г не зависит от нестабильностей элементов измерительной аппаратуры и от неровностей поверхности пульпы. При регулировании наиболее полно используется информация и динамика процессов обогащения в различных участках флотомашины. Предлагаемые способ и устройство регулирования предполагают использование простых и надежных малогабаритных волоконнооптических датчиков отражательной способности пульпы, позволяющих контролировать динамику процессов в любом месте флотомашины. Формула изобретения 1.Способ автоматического регулирования процесса флотации основанный на измерении отражательной способности пульпы и коррекции удельного расхода флотореагентов, отличающийся тем,что, с целью повышения точности регулирования, измеряют текущие значения величин относительных градиентов отражательной способности пульпы по высоте и фрон. ту камер, и удельный расход флотореагентов корректируют в зависимости от измеренных величин. 2.Устройство для осуществления способа по п.2, содержащее вычислительный блок, датчики отражательной способности и дозатор флотореагентов, отличающееся тем, что оно дополнительно снабжено двумя группами волоконнооптических датчиков отражательной способности пульпы, осве.тителем с модулятором и.фотоумножителем, причем датчики групп соединены с осветителем и фотоумножителем гибкими волоконнооптическими световодами, при этомпервая группа датчиков установлена по высоте камер флотомашины, а вторая группа датчиков по фронту камер. 3.Устройство по п.2, о т л и ч чающееся тем, что, с целью повышения метрологической надежности, датчи-ки отражательной способности снабжены очистителями, выполненными в виде форсунок, соединенных собой общей магиотралью, ко- . торая периодически подключается к водяной магистрали высокого давления. Источники информации, принятые во внимание при экспертизе 1.Патент ОНА 3471010, кл. 209-1, опублик. 1971. 2.Бриллиантов В. В. Автоматизация углеобогатительных фабрик и контрольно-измерительные приборы. М., Недра, 1977, с. 223-226.
515 W W W W
. 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контролягРАНиц РАздЕлА пульпы, пЕНы и ВОздуХАВО флОТОМАшиНЕ | 1979 |
|
SU816555A1 |
| Устройство для сепарации полезных ископаемых | 1982 |
|
SU1094620A1 |
| Способ сепарации полезных ископаемых и устройство для его осуществления | 1980 |
|
SU995884A1 |
| Способ анализа качества сыпучего материала на ленте конвейера и устройство для его осуществления | 1984 |
|
SU1178490A1 |
| ЛАБОРАТОРНАЯ ФЛОТАЦИОННАЯ МАШИНА | 2016 |
|
RU2636074C1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ СТЕПЕНИ | 1970 |
|
SU261302A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ТОЛЩИНЫ СЛОЯ ПЕНЫ И УРОВНЯ ПУЛЬПЫ В КАМЕРЕ ФЛОТОМАШИНЫ | 1992 |
|
RU2006290C1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ ИЗБРАННЫХ МИНЕРАЛОВ ИЗ РУДНЫХ ПУЛЬП НАПОРНОЙ ФЛОТАЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2507007C1 |
| Способ управления качеством пенного продукта и устройство для его осуществления | 1980 |
|
SU1036382A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕНООБРАЗУЮЩЕЙ СПОСОБНОСТИ РЕАГЕНТА ПО ИЗОБРАЖЕНИЮ ПЕНЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2359760C2 |