(54) МАГНИТОМОДУЛЯЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ Изобретение относится к измерительной тех-л ншсе и может использоваться, например, для измерения рассогласования в следящих систе- . мех с вентильным электроприводом. Известен многофазный тздукционный датчик положения типа индуктосин, содержащий т-фазш ш ротор и п-фазный статор с печатными обмотками 1.; Недостатками известного устройства являются малый диапазон линейности, а также низкие энергетические показатели. Наиболее близким, техническим решением к изобретению является магнитомодуляциоиный преобразователь угла, содержаний ротор в виде постоянного магнита, три чувствительных, элемента магнитомодулявдонного типа, расположенные вокруг ротора с-фазовым сдвигом в. 120, три формирователя импульсов, каждый из которых подключен входом к соответствуюэлемент 2-2шему чувствительному элементу. 2И-ИЛИ, первый и шестой входы которого связаны с выходом первого, второй и третий третьего, четвертый и пятый - второго формирователей импульсов, инвертор, подключенный
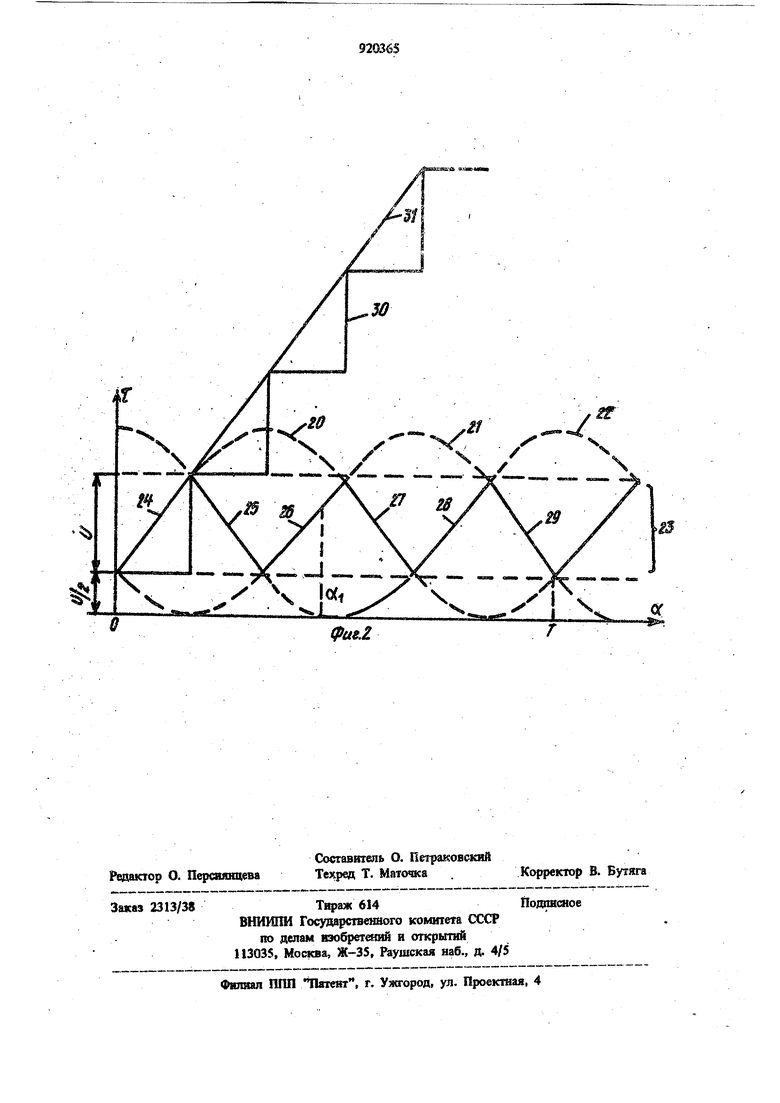
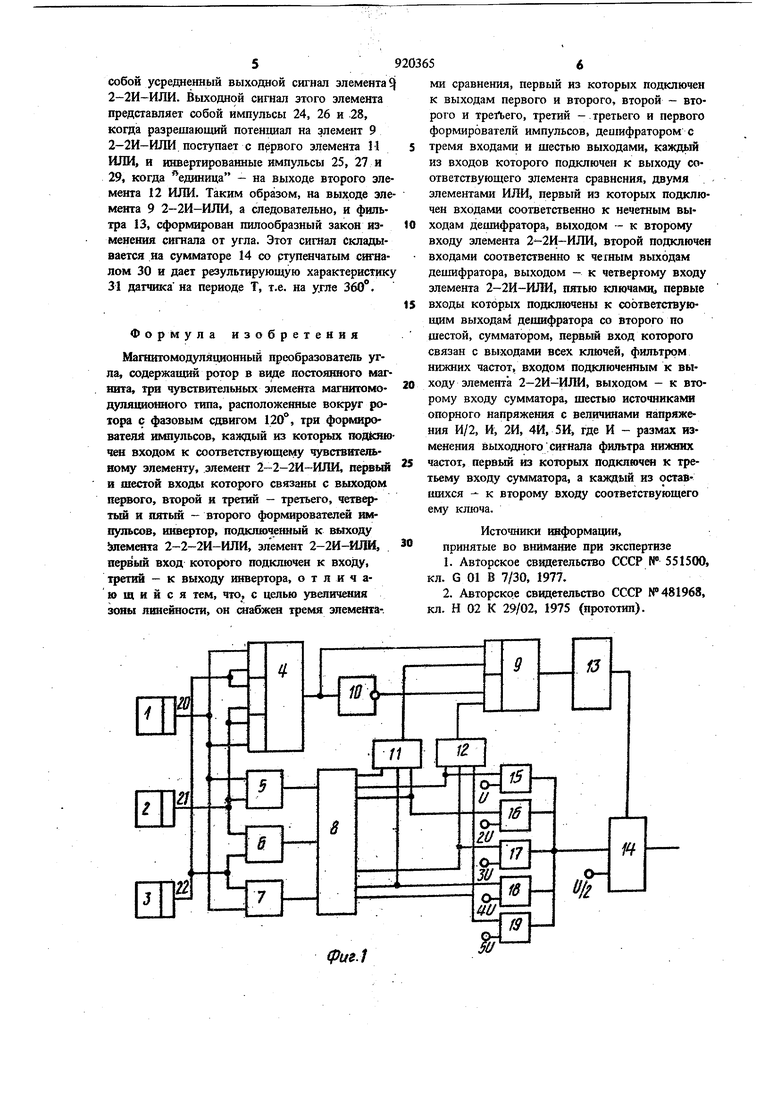
УГЛА к выходу элемента 2-2-2И-ИЛИ, злемеит 2-2И-ИЛИ, первый вход которого пощслючш к входу, 1фетий - к выходу инвертора (2. Недостаток данного устройства - малая зона линейности. Целью изобретения является увеличение зоны линейности датчика. Поставленная цель достигается Тем, что преобразователь снабжен тремя элементами сравнения, из которых подключен к выходам первого и второго, второй - второго и третьего, третий - третьего и первого формирователей импульсов, дешифратором с тремя входами и шестью выходами, каждый из входов которого подключен к выходу соответствующего элемента сравнения, двумя элементами ИЛИ, первый из которых подключен входами соответственно к нечетным выходам дешифратора, выходом - к второму входу злемеита 2-2И-1ШИ, второй под слючеи входами соответственно к четным выходам дешифратора, выходом - к четвертому входу злемента 2-2И-Ш1И, пятью ключами, первые вхо ды которых подаслючены к соответствующим 3 выходам дешифратора со второго по шестой, сумматором, первый вход которого связан с выходами всех ключей, фильтром нижних частот, входом подключенным к выходу элемента 2-2И-ИЛИ, выходом - к второму входу сумматора, шестью источниками опорного напряжения с величинами напряжений И/2, И, 2И, ЗИ, 4И, 5И, где И - размах изменения выходного сигнала фильтра нижних частот, первый из которых подключен к третьему входу сумматора, а каждый из оставшихся - к второму входу соответствующего ему ключа. На фиг. 1 изображена Функшюйальная. с}сема устроиства; на фиг. 2 - внешние характеристики трех магнитомодуляционных чувствительных элементов и выходная характеристика магните модуляционного датчика угла. Магнитомодуляционный датчик угла (фиг.1) состоит из ротора в виде постоянного мапшта (не показан), трех чувствительных элементов 1, 2 и 3 магнитомодуляционного типа (с формирователями импульсов на выходах), расположенных с угловым сдвигом 120° вокруг ротора - постоянного магнита. Выходы формирователей импульсов чувствительных элементов , 2 и 3 подключены к попарно соединенным входам элементов 4 2-2-2И-ИЛИ и попарно соединенным входам трех элеМен, тов 5, 6 и 7 сравнения, выходы которых саединены с тремя входами дешифратора 8 с шестью выходами. Выход элемента 4 2-2-2И ИЛИ соединен с первым входом элемента 9 2-2И-ИЛИ непосредственно, а с его третьим входом - через инвертор 10. Первые три выхода дешифратора (нечетные) через первый элемент 11 ИЛИ подключены квторому входу элемента 9 2-2И-ИЛИ, а вторые три выхода дешифратора 8 (четные) через второй элемент 12 ИЛИ - к четвертому его входу, выход элемента 9 через фильтр 1 нижних частот соединен со вторым входом сумматора 14, на первый вход которого подключены выходы пяти ключей 15-19, первые : входы которых; подключены к выходам дешифратора 8 со второго по щестой, а на вторые их входы подключены источники опорны напряжений U, 2U, 3U, 4U и 5U (не показаны), т.е. с последовательно увеличивающимся напряжением, согласно порядковому номеру ключа. .К третьему входу сумматора подключен источник с опорным напряжением U/2 (не показан), где U - размах изменений выходного сигнала фильтра нижних частот. Преобразователь работает следующим образом. Чувствительные элементы 1, 2 и 3 вырабатывают широтно-модулированные последовательности, которые проходят через формиро ватели, где происходит улучшение параметров 5 имп)шьсов - повышение крутизны фронтов. При повороте ротора на угол а относительная длительность (скважность) выходных сигналов 20, 21 и 22 чувствительных элементов 1, 2 и 3 изменяется по ; гармоническим законам, как это показано на фиг. 2, причем участки синусоиды, обозначенные 23, лежащие в зоне 60° угла а, близки к лшейным. Длительность импульсов (фиг, 2) на этих участках (т.е. сигнала 23) на любом отрезке оси а является средней из длительностей трех сигналов - 20, 21 и 22. Элемент 4 2-2-2ИИЛИ производит выделение среднего по длительности из системы 20, 21 и 22 сигнала 23, который поступает на первый вход элемента 9 2-2И-ИЛИ непосредственно, а на третий ее вход - через инвертор 10, Сигналы 20, 21 к.22 поступают на попарно соединенные входы трех элементов S, 6 и 7 сравнения импульсов по длительности (сигналы 21, 22 и 23 - широтао-модулированные), элементы 5, 6 и 7 вырабатывают сигналы (потенциалы), равные единице в случае, если длительность одного из входных сигналов больше длительности другого. Выходные сигналы элементов 5, 6 и 7 поступают на три входа дешифратора 8 с шестые выходами. Каждому из участков линейности 2429 (фиг, 2) в CHCieMe сигналов 20, 21 к 22 на периоде Т соответствует вполне определенное однозначное соотношение длительностей импульсов 20, 21 и 22, Например, на участке 24 соотношение 22 20 21, на участке 25 соотношение 20 22 21 и т.д. Дешифратор 8 по сигналам элементов 5, 6 и 7 сравнения импульсов вырабатывает на шести своих выходах потенциал единицу в случае, если угол разворота а попадает на один из шести участков - 24-29, т.е.. Например, при повороте ротора датчика на угол а, потенциал единица появляется на третьем (фиг. 1) выходе дешифратора 8. Пять выходных сигналов децшфратора 8 (со второго по шестой) поступает на первые ; входы пяти ключей 15, 16, 17, 18 и 19, на вторые входы которых подключены источники опорного напряжения с величинами U, 2U, 3U, 4U и 5U соответственно. Таким образом, всегда открыт лишь тот ключ, на каком участке из пяти (25, 26, 27, 28 и 29) находится ротор датчика. Если ротор на участке 25, то открыт ключ 15, если ротор на участке 26 - то ключ 16 и т.д. Таким образом, к выходу сумматора 14 подключены опорные напряжения U на участке 25, 2U - на участке 26 И т,д,, т.е. формируется ступенчатый закон изменения сигнала 30 от угла а. На участке 24 все ключи закрыты. На второй вход сумматора 14 поступает выходной сигнал фильтра нижних частот, предтсавляющий 5 собой усредненный выходной сигнал элемента 2-2И-ИЛИ. Выходной сигнал этого элемента представляет собой импульсы 24, 26 и 28, когда разрешающий потенциал на элемент 9 2-2И-ИЛИ поступает с первого элемента М ИЛИ, и инвертированные импульсы 25, 27 и 29, когда единица - на выходе второго эле мента 12 ИЛИ. Таким образом, на выходе эле мента 9 2-2И-ИЛИ, а следовательно, и фильтра 13, сформирован пилообразный закон изменения сигнала от угла. Этот сигнал складывается на сумматоре 14 со ртупенчатым сигеалом 30 и дает результирующую характеристик 31 датчшса на периоде Т, т.е. на угле 360°. Ф о р м ула изобретения Магнитомодуляционный преобразователь угла, содержащий ротор в виде постоянного маг нита, три чувствительных элемента матшпомодуляционного типа, расположенные ротора с фазовым сдвигом 120°, три формирователя импульсов, каждый из которых rfofflKsao чен входом к соответствующеллу чувствительному элементу, элемент 2-2-2И-ИЛИ, первый и шестой входы которого связаны с выходом первого, второй и третий - третьего, четвертый и пятый - второго формирователей юлпульсов, Hifflq Top, подключенный к выходу Ьяемента 2-2-2И-ИЛИ, элемент 2-2И-ИЛИ, первый вход которого подключен к входу, третий - к выходу инвертора, отличающийся тем, что, с целью увеличения зоны линейности, он снабжен тремя элемента-. 5 ми сравнения, первый из которых подключен к выходам первого и второго, второй - второго и треЛего, третий - третьего и первого формирователи импульсов, деищфратором с тремя входами и шестью выходами, каждый из входов которого подключен к выходу соответствующего элемента сравнения, двзмя элементами ИЛИ, первый из которых подключен входами соответственно к нечетным выходам дешифратора, выходом -- к второму входу элемента 2 2И-ИЛИ, второй подключен входами соответственно к четным выходам дешифратора, выходом - к четвертому входу элемента 2-2И-ИЛИ, пятью ключами, первые входы которых подключены к соответствующим выходам деишфратора со второго по шестой, сумматором, первый вход которого связан с выходами всех ключей, фильтром нижних частот, входом подключенным к выходу элемента 2-2И-ИЛИ, выходом - к второму входу сумматора, шестью источниками опорного напряжения с величинами напряжения И/2, И, 2И, 4И, 5И, где И - размах изменения выходного сигнала фильтра нижних частот, первый из которых подключи к третьему входу сумматора, а каждый из оставишхся - к второму входу соответствующего ему ключа. Источники информации, принятые во внимание при экспертизе 1.Авторское сввдетельство СССР РР 551500, кл. G 01 В 7/30, 1977. 2.Авторское свидетельство СССР №481968, кл. Н 02 К 29/02, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитомодуляционный преобразователь угла | 1984 |
|
SU1234721A1 |
| ЭЛЕКТРОННЫЙ РЕНТГЕНОВСКИЙ СПЕКТРОМЕТРИЧЕСКИЙ КАНАЛ | 1999 |
|
RU2157553C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Устройство для преобразования сигналов | 1983 |
|
SU1112386A1 |
| Обратимая следящая система | 1984 |
|
SU1282078A1 |
| Цифровой феррозондовый измеритель азимута | 1987 |
|
SU1498913A1 |
| Устройство для формирования изображения на экране телевизионного приемника | 1985 |
|
SU1288751A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU771115A2 |
| Многоканальное устройство для контроля параметров | 1987 |
|
SU1444714A1 |
| Устройство считывания магнитных меток | 1984 |
|
SU1416678A1 |