(54) ЛЕНТОЧНО-РОЛИКОВЫЙ МЕХАНИЗМ ПРЯМОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ
I
Изобретение относится к приборостроению и измерительной технике и может использоваться как направляющая прямолинейного перемещения с малыми потерями на трение, как датчик угла наклрна.
Известны ленточно-роликовые механизмы типа Роламайт, содержащие два ролика, охваченные лентой по схеме S и сжатые между двумя плоскими параллельными плитами и характеризующиеся в настоящее время как механизмы с минимальными потерями на трение 1.
Известен ленточно-роликовый механизм прямолинейного перемещения, содержащий основание, установленные в нем каретку, ролики и гибкие звенья, охватывающие с двух сторон ролики и закрепленные на основании и каретке 2.
Эти механизмы обладают достаточно больщим коэффици ентом трения качения и малой чувствительностью к действию продольных сил, что не позволяет использовать их в качестве датчика измерения малых углов наклона.
Целью изобретения является уменьщение сил трения и увеличение чувствительности ленточно-роликового механизма к действию продольных сил.
Эта цель достигается тем, что механизм снабжен попарно связанными с каждым роликом щтырями, оси которых расположены в плоскости, параллельной проходящей через ось ролика плоскости, перпендикулярной основанию и смещенной от нее на величину радиуса штырей, парой блоков, один из которых установлен на каретке, а другой - на основании, гибкими звеньями, лежащими в расположенной касательно штырям плоскости, соединенными с одним из щтырей и охватывающими соответствующие блоки основания и каретки, упругими элементами, связывающими свободные концы гибких звеньев, соответственно, с основанием и кареткой.
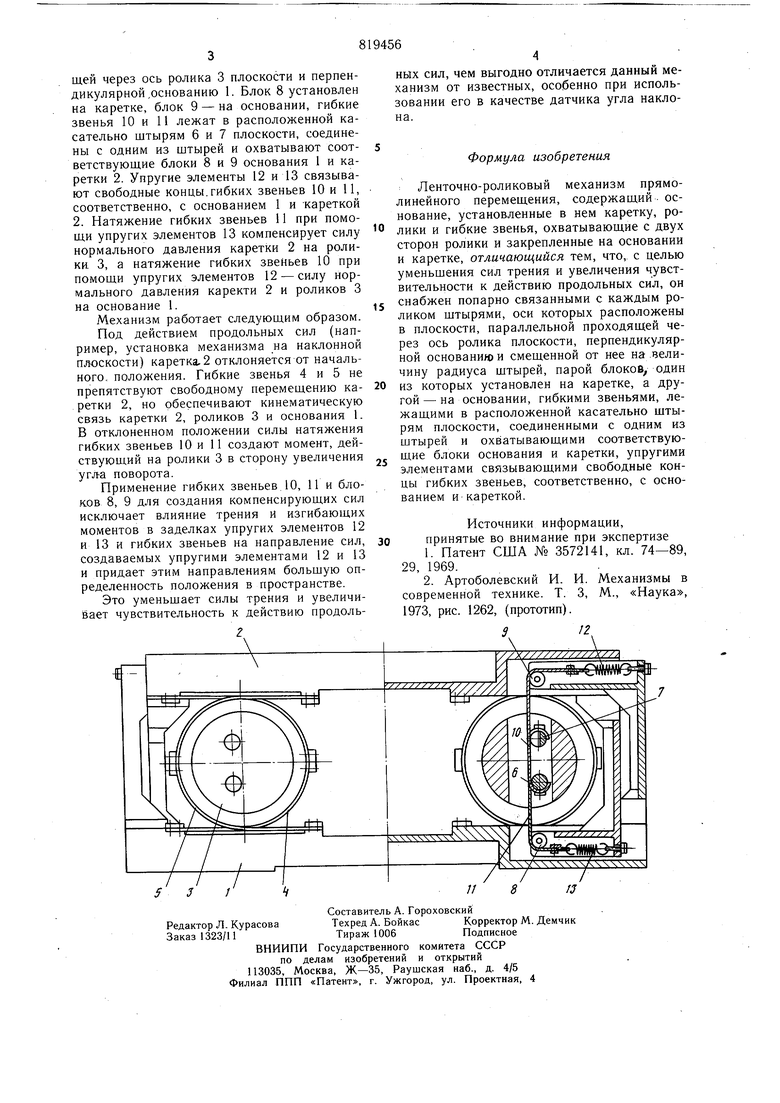
На чертеже изображен ленточно-роликовый механизм.
Механизм содержит основание 1, установленные в нем каретку 2, ролики 3 и гибкие звенья 4 и 5, охватывающие с двух сторон ролнки 3. На основании I и каретке 2 закреплены попарно связанные с каждым роликом 3 щтыри 6 и 7, оси которых расположены в плоскости, параллельной проходя
