(54) КАНАТНАЯ ПОДВЕСКА
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИНАМОМЕТРИРОВАНИЯ ШТАНГОВЫХ ГЛУБИННЫХ НАСОСОВ (ВАРИАНТЫ) | 2000 |
|
RU2176032C1 |
| ДИНАМОГРАФ ДЛЯ КОНТРОЛЯ РАБОТЫ СКВАЖИННЫХ ШТАНГОВЫХ НАСОСОВ | 1996 |
|
RU2113619C1 |
| Дозатор реагента на канатной подвеске | 2019 |
|
RU2720724C1 |
| Канатная подвеска штанг глубинонасосной установки | 1980 |
|
SU891889A1 |
| ПРЕОБРАЗОВАТЕЛЬ УСИЛИЙ НА КАНАТНОЙ ПОДВЕСКЕ | 1997 |
|
RU2143104C1 |
| УСТРОЙСТВО ДОЗИРОВАНИЯ РЕАГЕНТА В СКВАЖИНУ С ПРИВОДОМ ОТ СТАНКА-КАЧАЛКИ | 2010 |
|
RU2433249C1 |
| Канатная подвеска глубиннонасосной установки | 1978 |
|
SU708050A1 |
| СИСТЕМА ЗАКАЧКИ ВОДЫ В НАГНЕТАТЕЛЬНУЮ СКВАЖИНУ ДЛЯ ПОДДЕРЖАНИЯ ПЛАСТОВОГО ДАВЛЕНИЯ | 2004 |
|
RU2274737C1 |
| НАЗЕМНЫЙ СИЛОВОЙ АГРЕГАТ ГЛУБИННОГО СКВАЖИННОГО НАСОСА, ПРЕИМУЩЕСТВЕННО ГИДРОПОРШНЕВОГО ИЛИ СТРУЙНОГО, ДЛЯ ПОДЪЕМА ЖИДКОСТИ ИЗ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ ЭНЕРГИИ РАБОЧЕЙ ЖИДКОСТИ | 2008 |
|
RU2357099C1 |
| КОМПРЕССОРНЫЙ АГРЕГАТ ДЛЯ СЖАТИЯ ГАЗА ИЛИ ГАЗОЖИДКОСТНОЙ СМЕСИ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ЗАКАЧКИ ИХ В СКВАЖИНУ ИЛИ В ТРУБОПРОВОД | 2008 |
|
RU2391557C1 |
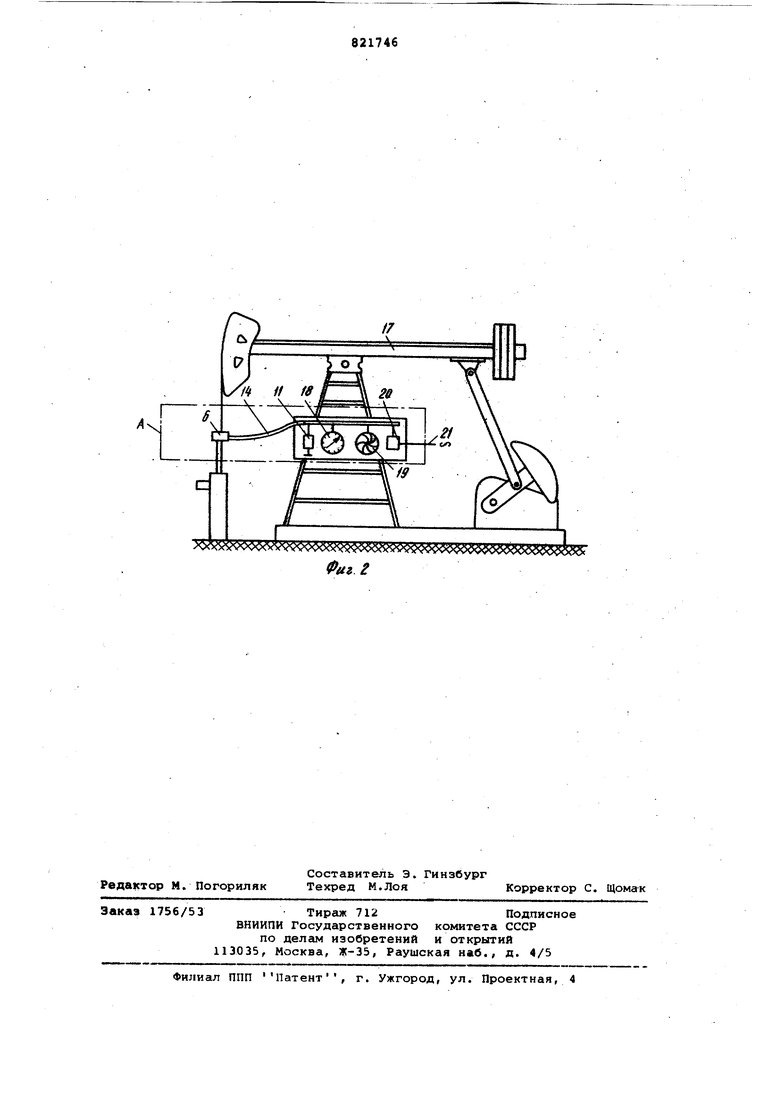
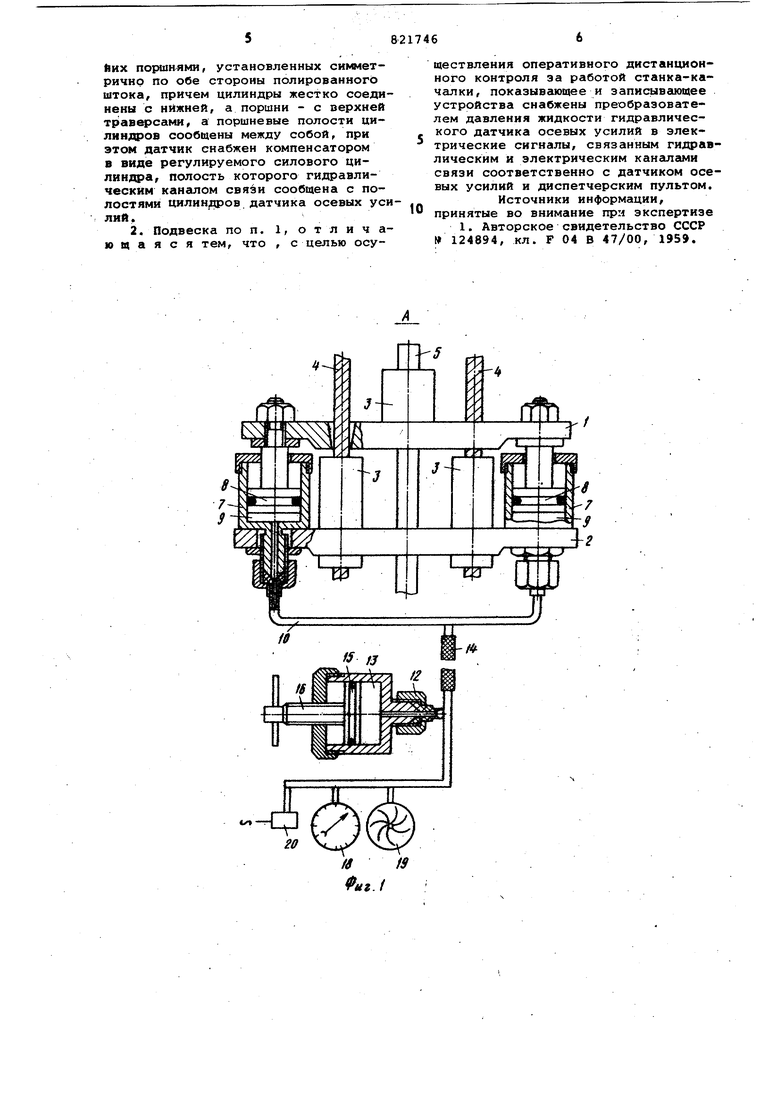
Изобретение относится к скважинным шаговым насосам с приводом от станка-качалки, в частности к канат ной подвеске их сальникового штока и может быть использовано при механизированной добыче нефти. Известна канатная подвеска сальникового штока скважинного штангово насоса,содержащая верхнюю и нижнюю траверсы,установленные между ними опо ные втулки с клиновыми захватами дл каната и полированного сальникового штока, а также гидравлический датчи осевых усилий в точке подвеса штанг в виде гидравлического динамографа, позволяющего осуществлять замер и запись осевых усилий в точке подвеса штанг с помощью показывающего и. записывающего устройства 1. Недостаток этой конструкции канатной подвески состоит в тоМ, что при установке между ее траверсами автономного-гидравлического динамог рафа с показывающим и записывающим устройствами для определения усилий в точке подвеса штанг, необходима остановка, станка-качалки, а все операции по установке динамографа осуществляются вручную. При этом положение динамографа в канатной подвеске не контролируется, а, следовательно, точность определения усилий низка и непригодна для объективного их количественного анализа. Цель изобретения - повышение точности и эффективности контроля осевых усилий в точке подвеса штанг. Это достигается тем, что гидравлический датчик осевых усилий выполнен в виде двух цилиндров с расположенными в них поршнями, установленных сиьметрично по обе стороны полированного штока, причем цилиндры жестко соединены с нижней, а поршни - с верхней траверсами, и поршневые полости цилиндров сообщены между собой, при этом датчик снабжен компенсатором в виде регулируемого силового цилиндра, полость которого гидравлическим каналом связи сообщена с полостями цилиндров датчика осевых усилий. Кроме того, с целью осуществления оперативного дистанционного контроля за работой станка-качалки показывающее и записывающее устройства снабжены преобразователем давления жидкости гидравлического датчика осевых усилий в электрические сигналы, связанным гидравлическим и электрическим каналами связи соответственно с датчиком осевых усилий и диспетчерским пультом ( на чертеж не показан). На фиг. 1 изображена канатная подвеска сальникового штока с гидравлическим датчиком осевьк усилий в точке подвеса штанг и компенсатором; на фиг. 2 - принципиальная схема станка-качалки с комплексом контрольно-измерительных, устройств. Предлагаемая канатная подвеска содержит верхнюю 1 -и нижнюю 2 траве сы, установленные между ними опорны втулки 3 с клиновыми захватами (на чертеже не показаны) для каната 4 и полированного сальникового штока 5, гидравлический датчик б осевых усилий (фиг. 2) в точке подвеса шта выполненный в виде двух цилиндров 7 с расположенными в них поршнями 8, установленны х си1 метрично по обе стороны полированного штока 5, причем цилиндры 7 жестко соединены с нижней 2, а поршни 8 - с верхней 1 траверсами, поршневые полости 9 цилиндров 7 сообщены между собой кана лом 10. Датчик 6 осевых усилий снаб жен компенсатором 11 (фиг. 2) в виде регулируемого силового цилиндра полость 13 которого гидравлическим каналом 14 связи сообщена с каналом 10, связывающим полости цилиндров 7 датчика 6 осевых усилий. Полость 13 силового цилиндра 12 - регулируемая и образована самим цилиндром 12 и поршнем 15 - с ходовьн винтом 16. Комплекс контрольно-измерительных устройств станка-качалки 17 включает также показывающее 18 и записыва ющее 19 устройства, которые снабжены преобразователем 20 давления жид кости гидравлического датчика 6 осе вых усилий в электрические сигналы, связанным гидравлическим 14 и электрическим 21 каналами связи .соответ ственно с датчиком 6- осевых усилий и диспетчерским пунктом. Устройство работает следующим образом. Силы, действующие на полированны сальниковый шток 5, через клиновой захват (на чертеже не показан) и верхнюю траверсу 1 передаются поршням 8 гидравлического датчика 6 осевых усилий, которые, перемещаясь , сжимают жидкость в поршневых полостях 9 цилиндррв 7. Возросшее давление жидкости по сообщаемому поршневые полости 9 цилиндров 7 каналу 10 и каналу 14 гидравлической связи Поступает к.записывающему 19 и доказывающему 18 устройствам, а также преобразователю 20 давления жидкости в электрические сигнаиты, который посредством гидравлического 14 и электрического 21 каналов связи связан соответственно с дат.ччком 6 осевых усилий и диспетчерским пультом, т.е. электрические сигналы поступают на пульт диспетчера. Для поднятия и фиксации верхней траверсы 1, а также для компенсации возможных утечек жидкости из поршневой полости 9 гидравлического датчика 6 осевых усилий посредством вращения ходового винта 16 перемещают поршень 15 компенсатора li, являющегося одновременно и фиксатором, вытесняя жидкость из регулируемой полости 13 его силового цилиндра 12 по каналу гидравлической 14 связи в поршневую полость 9 гидравлического датчика 6 осевых усилий. Вращение ходового винта 16 может осуществляться как вручную, так и посредством электропривода с местным дистанционным управлением. В случае необходимости отключения гидравлического датчика 6 осевых усилий, вращением ходового винта 16 в обратную сторону увеличивают объем регулируемой полости 13, в которую вытесняется жидкость из-под поршней 8 гидравлического датчика 6 осевых усилий до посадки верхней 1 траверсы на опорные втулки 3. Строго фиксированное положение . . гидравлического датчика 6 осевых усилий относительно полированного сешьникового штока 5 существенно повьииает точность контроля осевых усилий. Применение гидравлического компенсатора 11 позволяет исключить ручное поднятие и опускание верхней траверсы 1, сопряженное с трудоемкостью и опасностью травмирования. Установка компенсатора на неподвижной части станка-качалки дает возможность осуществлять контроль осевых усилий без остановки станка-качалки 17. Наличие преобразователя 20 давления жидкости в электрические сигналы, связанного каналом 14 гидравлической связи с датчиком 6 осевых усилий с одной сто-РОНЫ и посредством канала 21 электрической связи с пультом диспетчера с другой стороны, позволяет осуществлять оперативный дистанционный контроль работы станка-качалки 17. Формула изобретения 1. Канатная подвеска сальникового штока скважинного штангового насоса, содержащая верхнюю и нижнюю траверсы, установленные между ними опорные втулки с клиновы1«ш захватами дпя каната и полированного сальникового штока, а также гидравлический датчик осевых усилий в точке подвеса штанг с показывгиощим и записывающим устройствами, о т л и ч а ю щ ая с я тем, что с целью повышения точности и эффективности контроля осевых усилий в точке подвеса штанг, гидравлический датчик осевых усилий выполнен в виде двух цилиндров с расположенными в
liHX поршнями, установленных симметрично по обе стороны полированного штока, причем цилиндры жестко соединены с нижней, а поршни - с верхней траверсами, а поршневые полости цилиндров сообщены между собой, при этом датчик снабжен компенсатором в виде регулируемого силового цилинщ)а, полость которого гидравлическим каналом связи сообщена с полостями цилиндров датчика осевых усилий.
Источники информации, принятые во внимание при экспертизе
:х
