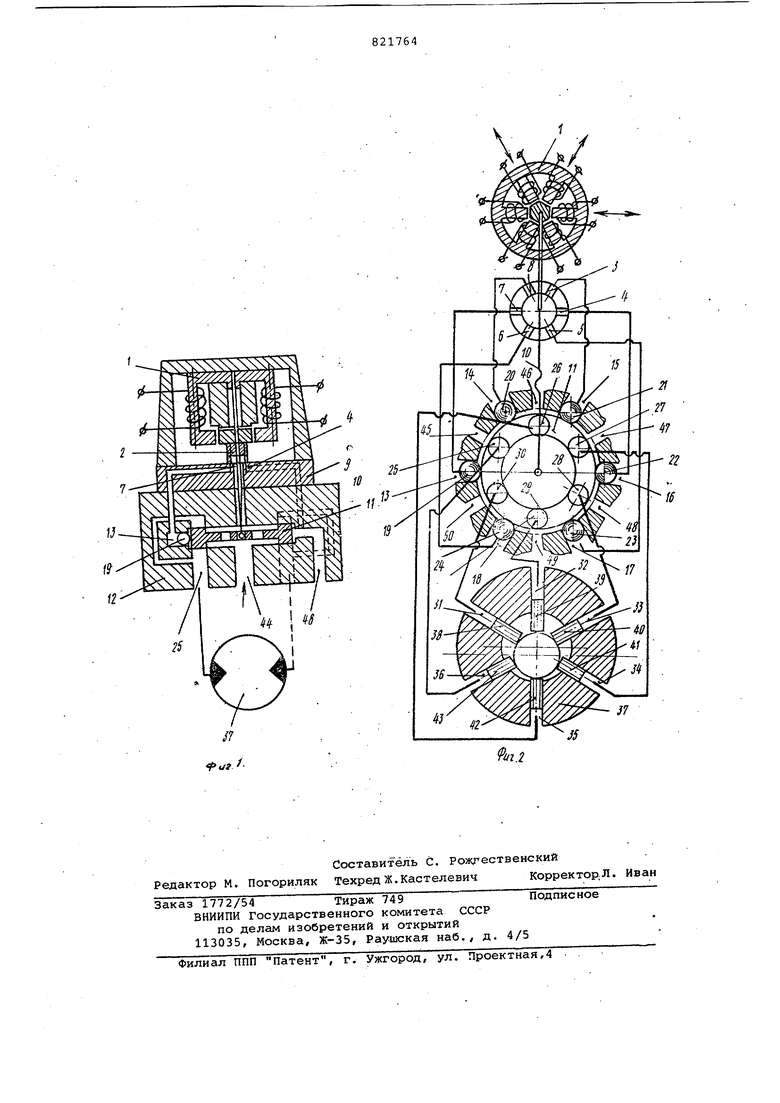
(54) ЭЛЕКТРОГИДРАВЛ УПРАВЛЕНИЯ МН ГИДРОДВИГ Изобретение относится к гидроавто матике и может быть использовано в гидравлических следящих системах различных машин, например, промышленных роботов. Известен электрогидравлический усилитель для управления поршневьм гидродвигателем, содержащий электромеханический преобразователь, управляющий ;гегу-1ируемыми дросселями первого каскада двухкаскадного гидрр усилителя с упругой обратной связью по полржению золотника раепределителя второго .каскада, полости управления которого связаны с регулируемыми дросселями, а окна - с рабо чими полостями гидродвигателя Т, Недостатком данного усилителя является ограниченность функциональ ных возможностей. Цель изобретения - расширение функциональных возможностей путем создания поля давления рабочей, жидкости, последовательно обегающего каждый из поршней гйдродвигателя. Цель достигается тем, что распределитель выполнен с числом окон, равным числу поршней гйдродвигателя каждое из которых Связано с одной из полостей гидродвигателя, и снабИЙ УСИЛИТЕЛЬ ДЛЯ ОСТНЫМ ПОРШНЕВЫМ жен дополнительными полостями управления, каждая из которых связана с регул иремым дросселем. На фиг. 1 изображен гидроусилитель, продольный разрез; на фиг. 2 - принципиальная гидравлическая схема. Усилитель.содержит электромеханический преобразователь 1 для привода, золотник 2 по нескольким направлениям относительно отверстий 3-8, образующих с ним регулируемые дроссели первого каскада двухкаскадного гидроусилителя 9, снабженного пружиной 10 упругой обратной связи по положению золотника 11 распределителя 12 второго каскада, полости 13 18 управления которого ограниченные шариками 19-24,соответственно связанные с регулируемыми дросселями, а окна 25-30 - с рабочими полостями 31-36 гидродвигателя 37. При этом число окон распределителя, полостей управления и регулируемых дросселей равно числу поршней 38-43 гидродви. гателя 37 (например шести). Подвод рабочей жидкости осуществляется по каналу 44, слив - через сливные окна 45-50.. , Электрогидравлический усилитель работает следующим образом.
При отсутствии входного сигнала нейтральном положении золотника 2 давления во всех полостях 13-18 правления одинаковы, золотник 11 связи с наличием пружины 10 многооординат дой обратной связи на- е одится также в нейтральном положении и расход в поршневых полостях 31 - 36. исполнительного гидродвигателя 37 отсутствует. При подаче электрического сигнала преобразователь 1 IQ смещает золотник 2 в соответствующем направлении, соединив тем самым часть полостей13 - 18 управления с каналом 44, а остальные - со сливом. Возникший перепад давлений в полостях 13 и 14 приводит к смещению из нейтрального положения в соответствующем направлении распределительного золотника 11, что, в свою очередь/ приводит к деформации пружины 10 обратной связи и возврате- 20 ние управляющего золотника 2 в первоначальное положение ( или в дpvгoe требуемое).Таким образом, устанавливается равновесие на электромеханическом преобразователе электричес- 25 кого и механического моментов. Распределительный золотник 11, оставшись смещенным из нейтрального положения, приводит в движение исполнительный гидродвигатель 37 в соот- TQ ветствующую сторону, частота вращения которого определяется частотой коммутации тока в катушках электромеханического -преобразователя 1, а развиваемый момент - величиной тока. ,
Таким образом, изменяя частоту коммутации и величину тока в катушках электромеханического преобразователя, можно создавать любой закон движения исполнительного гидродвигателя 37 в связи с созданием поля 40
давления рабочей жидкости, последовательно обегающего каждый из поршней гидродвигателя. Применение предлагаемого изобретения в гидравлических следящих системах различных машин, например промышленных роботов, позволяет расширить их функциональные возможности и тем самым повысить эффективность их использования.
Формула изобретения
Электрогидравлический усилитель для управления многополостным поршневым гидродвигателем, содержащий электромеханический преобразователь, управляющий регулируемыми дросселями первого каскада двухкаскадного гидроусилителя с упругой обратной связью по положению золотника распределителя второго каскада, полости управленчя которого связаны с регулируемыми дросселями, а окна - с рабочими полостями гидродвигателя, отл и-чающийся тем, что, с целью расширения функциональных возможностей путем создания поля давления рабочей жидкости, последовательно обегающего каждый из поршней гидродвигателя, распределитель выполнен с числом окон, равным числу поршней гидродвигателя, каждое из которых связано с одной из полостей гидродвигателя, и снабжен дополнительньоми полостями управлния, каждая из которых связана с регулируемым дросселем.
Источники информации, принятые во внимание при экспертизе
1. Патент США № 3023782, кл. 137-85, опублик. 1967.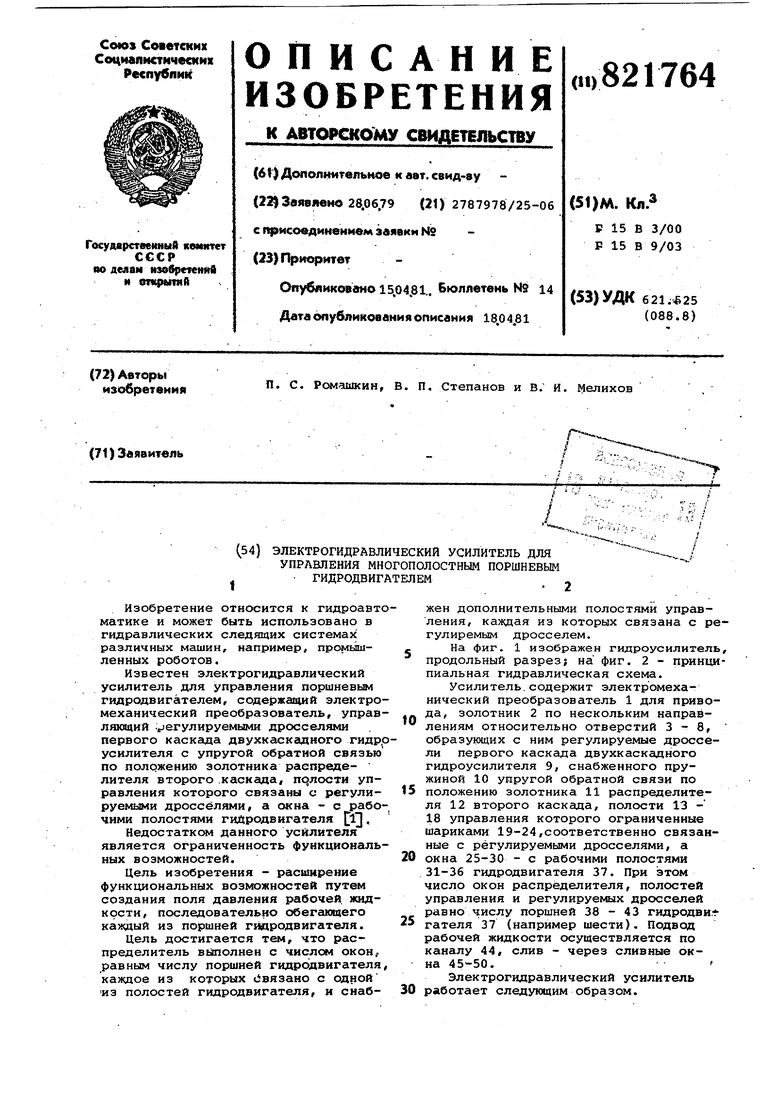
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМ АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 1991 |
|
RU2018708C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД ДРОССЕЛЬНОГО | 1972 |
|
SU335453A1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| Механизм управления регулируемым аксиально-поршневым насосом | 1982 |
|
SU1070332A1 |
| Гидравлический следящий привод | 1988 |
|
SU1560836A1 |