.(54) ИМПУЛЬрНЫЙ АВТОМАТИЧЕСКИЙ ДОЗАТОР ЖИДКОСТЕЙ
ения отклонения величины мгновенного асхода от среднего.
Посгавленная цель достигается тем, то устройство для сглаживания пульсаций асхода выполнено в вице гнцравлического офотивления с управляемым приводом, ход которого соединен со входой прибора правления дозатором.
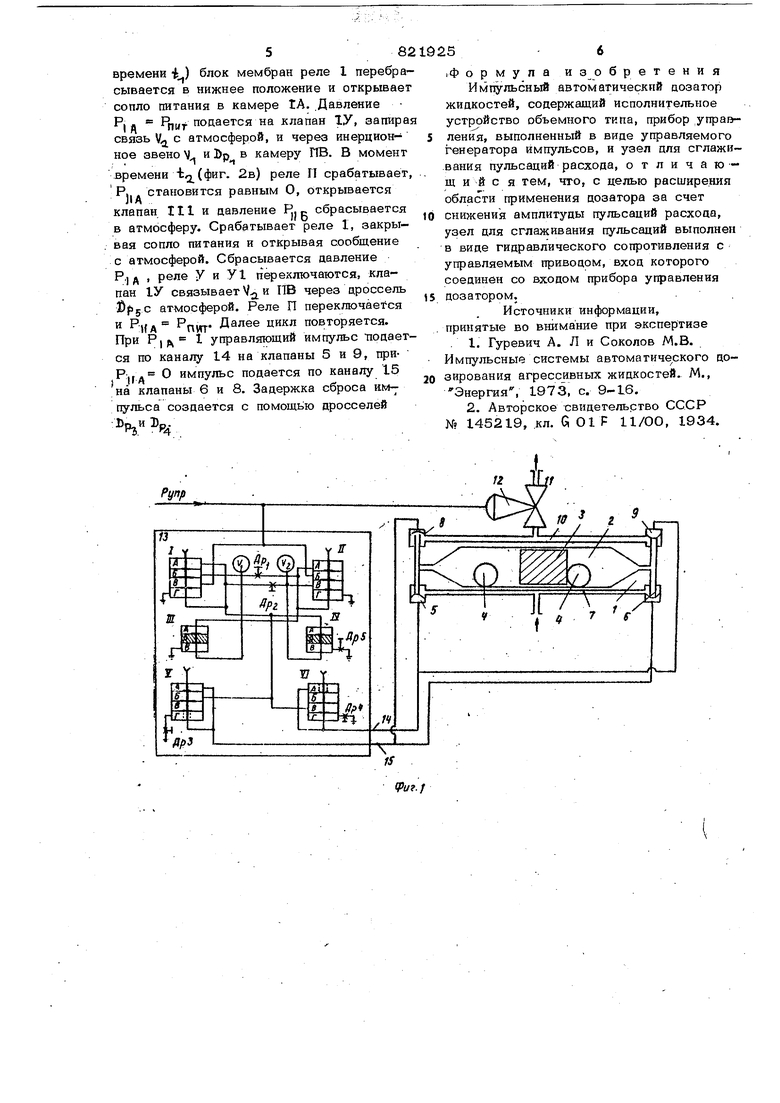
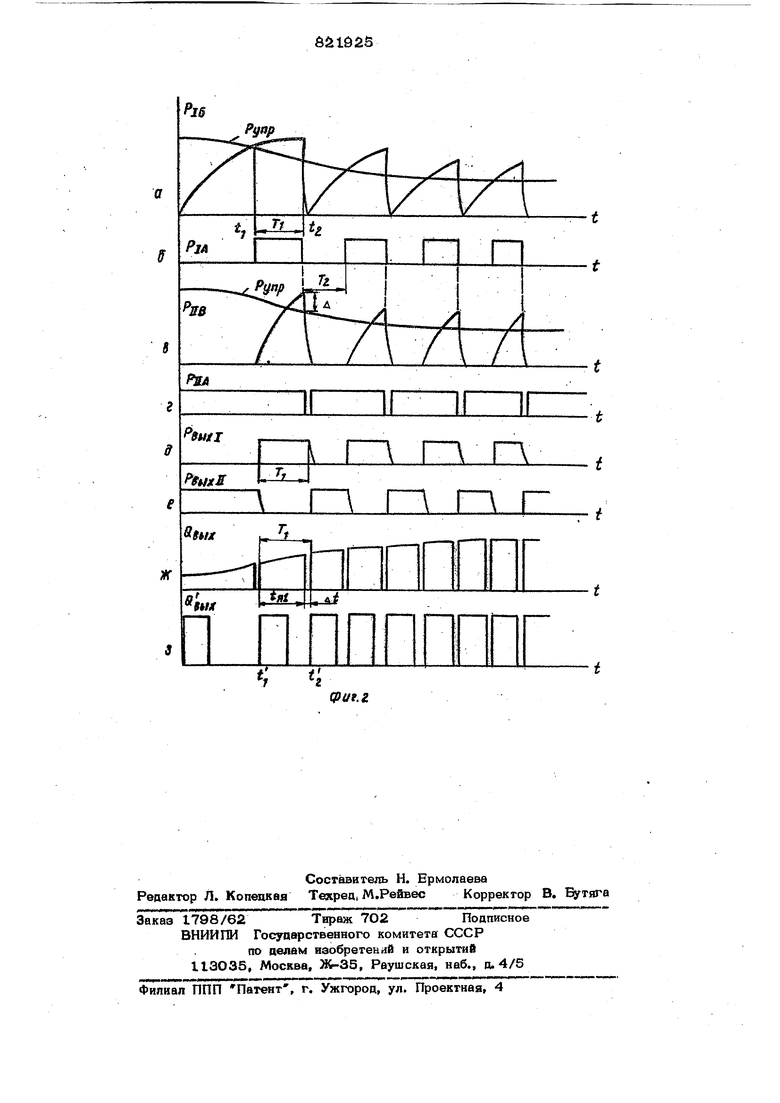
На фиг. I показана принципиальная схема дозатора , на 4«г. 2 циклограмма его работы.
Дозатор содержит исполнительное уо тройтиво I с мерным цилиндром 2, не- , уплотненным поршнем 3 н запорными шаг раками -4, клапаны 5 и 6, соединенные между собой входным трубопроводом 7, клапаны 8 и 9, соединенные между собой выходным трубопроводом 10, на котором установлено регулируемое гидравлическое сопротивление 11, привод 12 которого соединен со входом прибора 13 управле-; ния. К выходным каналам 14 и 15 . последнего попарно-перекрестно присоединены клапаны исполнительного устройства. Дозатор работает следующим образом. При подаче непрерывного управляющего сигнала (давления сжатого воздуха) на вход прибора 13 управления, последний генерирует на выходах 14 и 15 две последовательности пневматических импульсов Ig{,, и , сдвинутых друг относительно друга во времени (фиг. 2д и 2 в). Частота этих импульсов f(P
УПР Импульсы поочередно поступают на пары, клапанов 5 и 9 и 6 и 8. Напором дозируемой жидкости через трубопровод 7 и открытый в данный момент клапан 5 поршень 3 перемещается в крайнее правое положение. При этом происходит выдача дозы через открытый клапан 9, выходной трубопровод 10 и гидравлическое сопротивление 11. Так как управляющее давление поступает одновременно на вход прибора 13 управления и на привод 12 управляемого гидравлического сопротивления 11, то величина этого сопротивления Ч является функцией входного
Когда по каналу 14 поссигнала Р
Уп тупает очередной управляющий импульс, клапаны 5 и 9 закрываются. Во избежание неуправляемого проскока жидкости в момент переключения клапанов, импульс по каналу 15 снимается с клапанов 6 и 8 с задержкой во времени по отношению к моменту запирания клапанов 5 и 9. При закрьшании клапанов 6 и 8 происходит очередная выдача дозы через трубопровод 1G и гидравлическое сопротивлени 11. Привод 12 выполнен в виде мембранного исполнительного механизма, предртавл5Ж)щего в совокупности с регулируе1МЫМ гидравлическим сопротивлением регу- |лирующий клапан, в котором увеличение давления Р,р,р на мембрану привода вььзывает уменьшение проходного сечения, ,а уменьшение давления - увеличение проходного сечения за счет действия пружины исполнительного механизма. Если в динамике процесса регулирования происходит увеличение давшния период межд двумя дозами увеличивается, проходное сечение клапана уменьшается и мгновенный расход Qj при выдаче очередной 5 дозы уменьшается. Длительность выдачи дозы постоянного объема возрастает и становится в соответствие с увеличившимся периодом между дозами. При уменьшении вели|ины Рурр частота выдачи доз 0 увеличивается, привод 12, увеличивает проходное сечение гидравлическогосопротивления 11, величина Qj/jf и доза того же объема выдается за более короткое время icT, соответствующее уменьшивше5 муся периоду выдач доз. Выбор соответствующих параметров привода 12 и гидравлического сопротивления 11 позволяет получить зависимостьter HPj(r,p),npn которой. величина скважности импульсов расхода минимальна во всем диапазоне изменения
Рупр
Прибор 13 управления реализован на базе элементов УСЭППА. Он состоит из генератора колебаний на двух пневмореле I и П, двух пневМоклапанов и 1У, связанных с выходом генератора, двух пневмореле У и YI, установленных параллельно и связанных с выходом генератора, двух пневмореле У и У1, установленных параллельно и связанных с выходом пневмореле I и пневмоклапаном 1У, а также пяти переменных дросселей, два из которых 1)р и1)р установлены между реле 1 и П и связаны с пневмоемкостями V- и V., в три ДругихИр ,IDp и Dp - на выходе в атмосферу реле У и У1 и клапана 1У. Прибор работает следующим образом. В камеры IB и ПВ подается переменное входное давление , определяющее частоту выдачи доз. Сопло питания в каме-
50 ре 1А закрыто. На выходе реле 1 устанавливается давление РХД О ( фиг. 26). В камере ПА сопло питания открыто и Р), д Pf,j, (фиг. 2г). Давление 1,д подается на клапан Ш , перекрывая связь
55 емкости V, с атмосферой и через инерционное звеноВр иу подается в камеру 1Б, где давление постепенно возрастает (фиг. 2а). Когда Р, g превышает Р, (момент
5S2
времени i ) блок мембран реле I перебрасывается в нижнее положение и открывает сопло питания в камере 1А. .Давление Р| д Рр„у. подается на клапан 1У, запирая связь V с атмосферой, и через инерционное звено V и Do в камеру ПВ. В момент
; ,
времени 4,2 (фиг. 2в) реле П срабатывает, Р. д становится равным О, открывается клапан 111 и давление Р..,, сбрасывается в атмосферу. Срабатывает реле 1, закрывая сопло питания и открывая сообщение с атмосферой. Сбрасывается давление Р,| д , реле У и У1 переключаются, клапан 1У связывает и I1B через дроссель figC атмосферой. Реле П переключается и Р}(д PnwT цикл повторяется. При Р| 1 управляющий импульс подается по каналу 14 на клапаны 5 и 9, приPr.f д О импульс подается по каналу 15 на клапаны 6 и 8. Задержка сброса нм-у пульса создается с помощью дросселей
56
.формула изобретения Имгч льсный автоматический дозатор жидкостей, содержащий исполнительное устройство объемного типа, прибор управления, выполненный в виде управляемого генератора импульсов, и узел для сглаживания пульсаций расхода, отличаю - щ и и с я тем, что, с целью расшире.ния области применения дозатора за счет снижения амплитуды пульсаций расхода, узел для сглаживания пульсаций выполнен в виде гидравлического сопротивления с управляемым приводом, вход которого соединен со входом прибора управления дозатором.
Источники информации, принятые во внимание при экспертизе
. 1. Гуревич А. Л и Соколов М.В. Импульсные системы автоматиче ского доирования агрессивных жидкостей. М., Энергия, 1973, с. 9-16.
2. Авторское свидетельство СССР № 145219, кл. Gi 01 F 11/00, 1934.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления частотно- иМпульСНыМ дОзАТОРОМ | 1979 |
|
SU817480A1 |
| Пневматический порционный дозатор жидкости и газа | 1980 |
|
SU924546A1 |
| Пневматический весовой дозатор | 1988 |
|
SU1610304A1 |
| Устройство для управления дозатором суспензии | 1989 |
|
SU1631296A1 |
| Устройство для импульсного дозирования газа | 1982 |
|
SU1132150A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1970 |
|
SU288439A1 |
| Индивидуальный дозатор корма в зависимости от величины надоя | 1985 |
|
SU1416090A1 |
| Пневматический весовой дозатор непрерывного действия | 1985 |
|
SU1278597A1 |
| Устройство для выдачи корма животным в зависимости от объема выдоенного молока | 1983 |
|
SU1114383A1 |
| Устройство для измерения вязкости жидкостей | 1983 |
|
SU1073624A1 |
Рупр
«
РУЛ
1
1Я//Г
}
Vi/xJ
r
i
ff
UJf
- Af
«Я
nt
«w/
i
f Jf /
II It II
r m
1
A n n
