Наиболее близким по технической ущности к предложенному является пособ безрезонаторного определения осинусной составляющей спектра поосового сигнала, основанный на пеиодической выборке мгновенных знаений исследуемого сигнала, сравнеии с косинусоидальным напряжением аданной частоты ш, уменьшении амплиудаа импульсов пропорционально cos«) t определении знака для дальнейшего уммирования З.
Однако в этом способе для получения величины косинусной составляющей с более высокой точностью необходимо значительное увеличение числа мгновенных значений исследуемого сигнала f{t), что связано с увеличением времени анализа и аппаратурным усложнением. Методическая погрешность значения величины косинусной составляющей увеличивается с увеличением номера гармоники, так как на периоде анализируемой гармоники изменяется число мгновенных отсчетов.
Цель изобретения - повышение точности.
Указанная цель достигается тем, что исследуемый сигнал удваивают по амплитуде, затем выбирают мгновенные значения сигнала с заданным шагом, каждую величину мгновенного значения умножают на соответствующий вес cos , интегрируют с учетом знака,и умножают на поправку для j-ой гармоники спектра с учетом числа выборок на интервале обработки сигнала.
Подключение весовых коэффициечтов cos jkit с соответствующим знаком к интегратору на время дискретизации с заданным интервалом позволяет исключить применение дополнительных счетчиков, генератора импульсов с косинусоидальным законом изменения опорной частоты. Введение поправки A,-(N -ь j) в конце интервала обработKvi сигнала корректирует методическую погрешность и позволяет получить значение величины косинусной составляющей спектра с одинаковой точностью для всех гармоник, что очень важно при фазовом спектральном анализе.
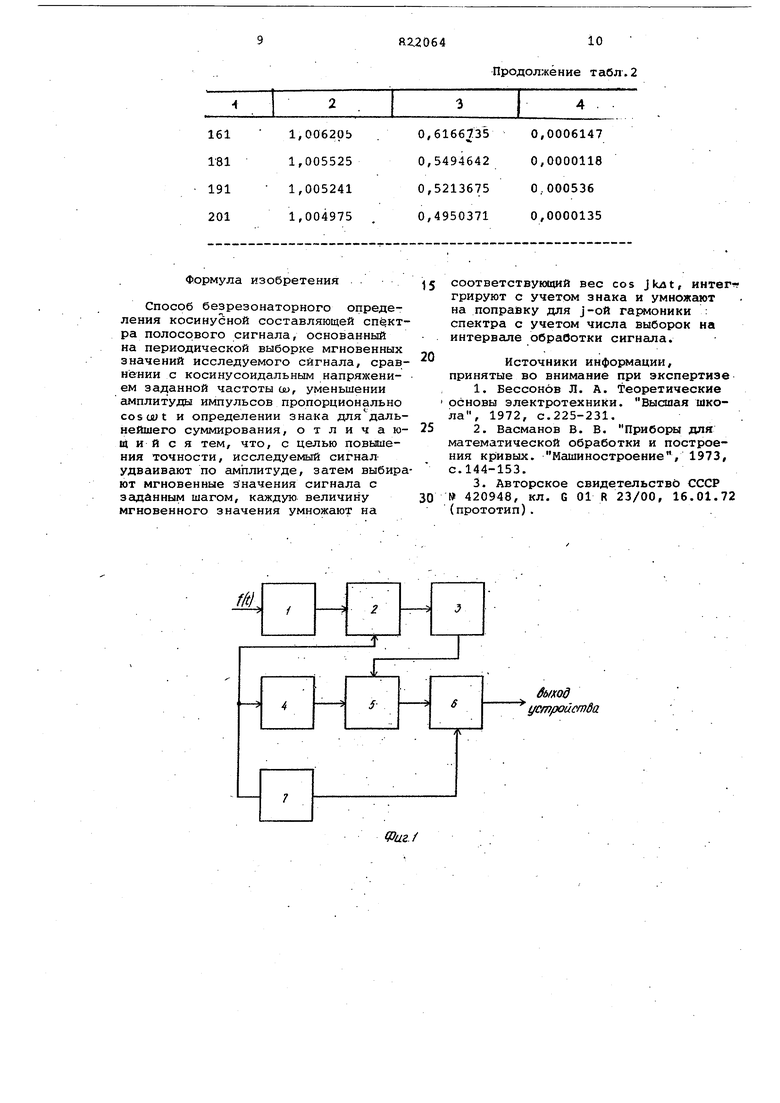
На Ф.ИГ. 1 представлено устройство, реализующее предлагаемый способ.
Устройство содержит блок 1 умножения на два,блок 2 выборки мгновенных значений сигнала Р(1),блок 3 знака, линейку 4 весовых сопротивлений, эквивалентных cos jkut 4, интегратор 5, блок б умножения и выдачи результата , программное устройство 7 (микропроцессор) ..
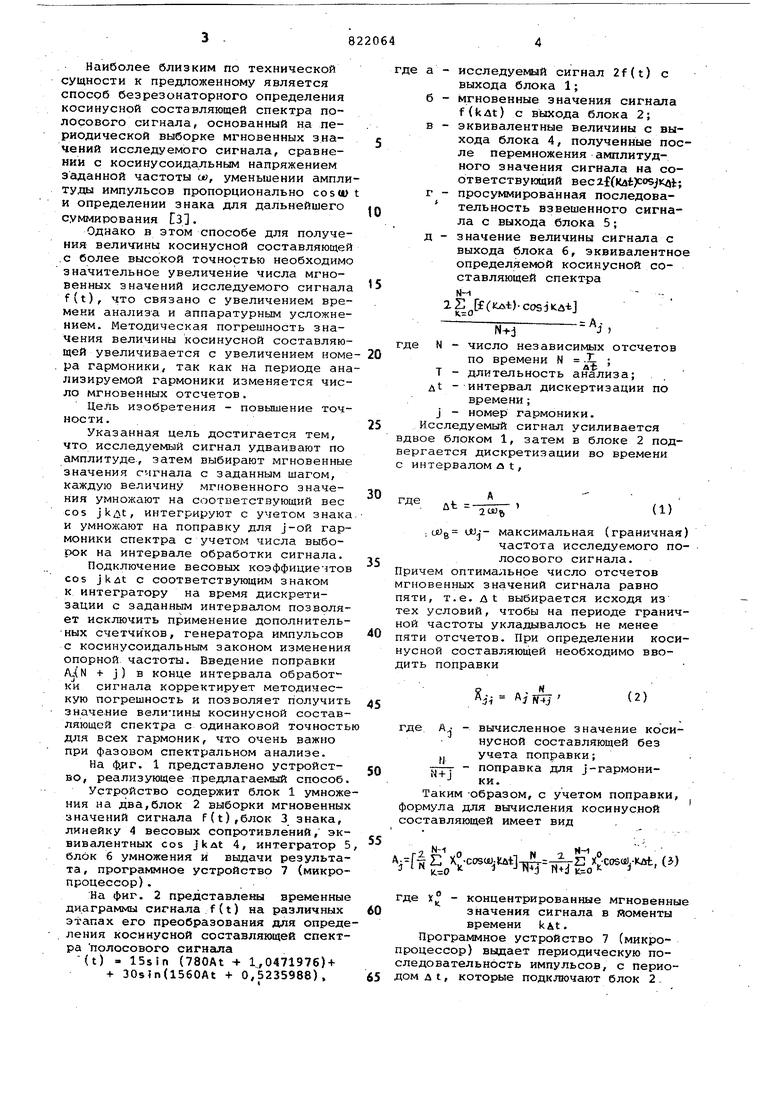
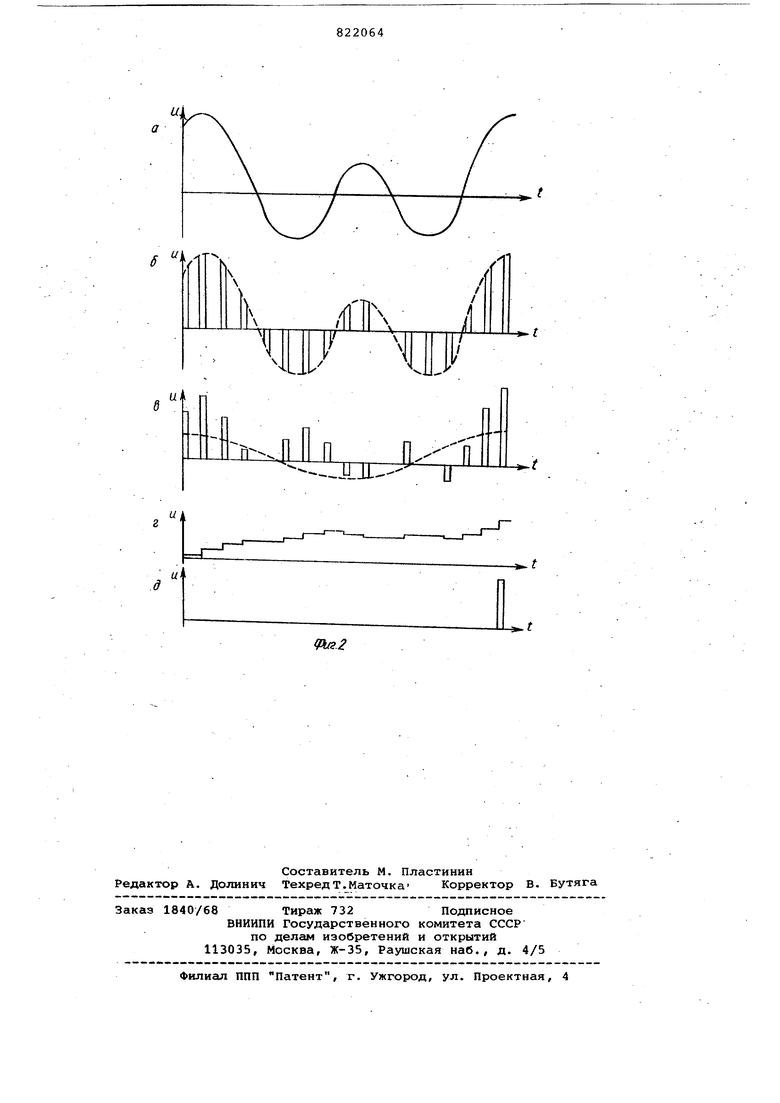
На фиг. 2 представлены временные диаграммы сигнала f(t) на различных этапах его преобразования для определения косинусной составляющей спектра полосового сигнала (t) ISsin {780At 1,0471976) + + 30sin(l560At + 0,5235988),
де a - исследуемый сигнал 2f(t) с выхода блока 1;
б - мгновенные значения сигнала f(kdt) с выхода блока 2;
в - эквивалентные величины с выхода блока 4, полученные после перемножения амплитудного значения сигнала на соответствующий BeczffXatJcosjK jt;
г - просуммированная последовательность взвешенного сигнала с выхода блока 5;
д - значение величины сигнала с выхода блока 6, эквивалентное определяемой косинусной составляющей спектра N-I
()Cu-fc)-cosJ A-fcJ
3 )
где N ЧИСЛО независимых отсчетов по времени N -Ь ; Т длительность анализа;
At интервал дискертизации по времени;
j - номер гармоники. Исследуемый сигнал усиливается вдвое блоком 1, затем в блоке 2 подвергается дискретизации во времени с интервалом л t,
где
ut
(1)
2Шб
. и)д максимальная (граничная)
-d
частота исследуемого полосового сигнала.
Причем оптимальное число отсчетов мгновенных значений сигнала равно пяти, т.е. At выбирается исходя из тех условий, чтобы на периоде граничной частоты укладывалось не менее пяти отсчетов. При определении косинусной составляющей необходимо вводить поправки
у л
(2)
Aji Aj NTJ
где. А
-вычисленное значение косинусной составляющей без учета поправки;
N N+j
-поправка для j-гармоники.
Таким -образом, с учетом поправки, формула для вычисления косинусной составляющей имеет вид
rfl W W& -где y° - концентрированные мгновенные значения сигнала в Моменты времени kit.
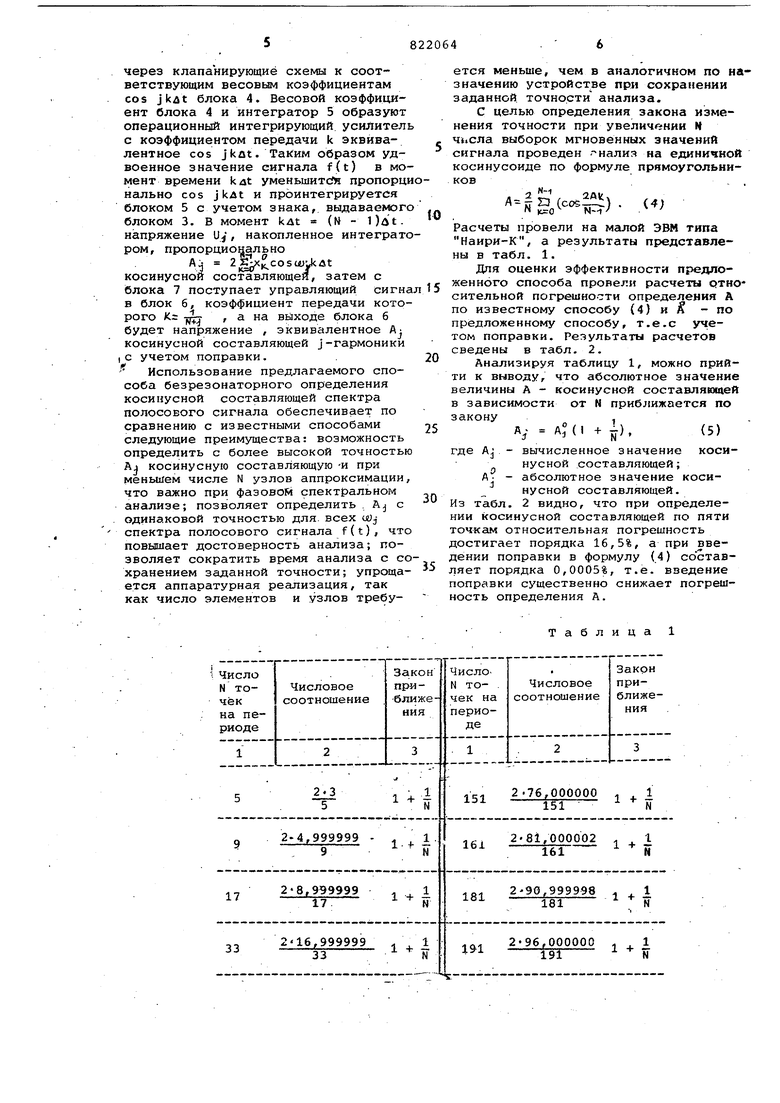
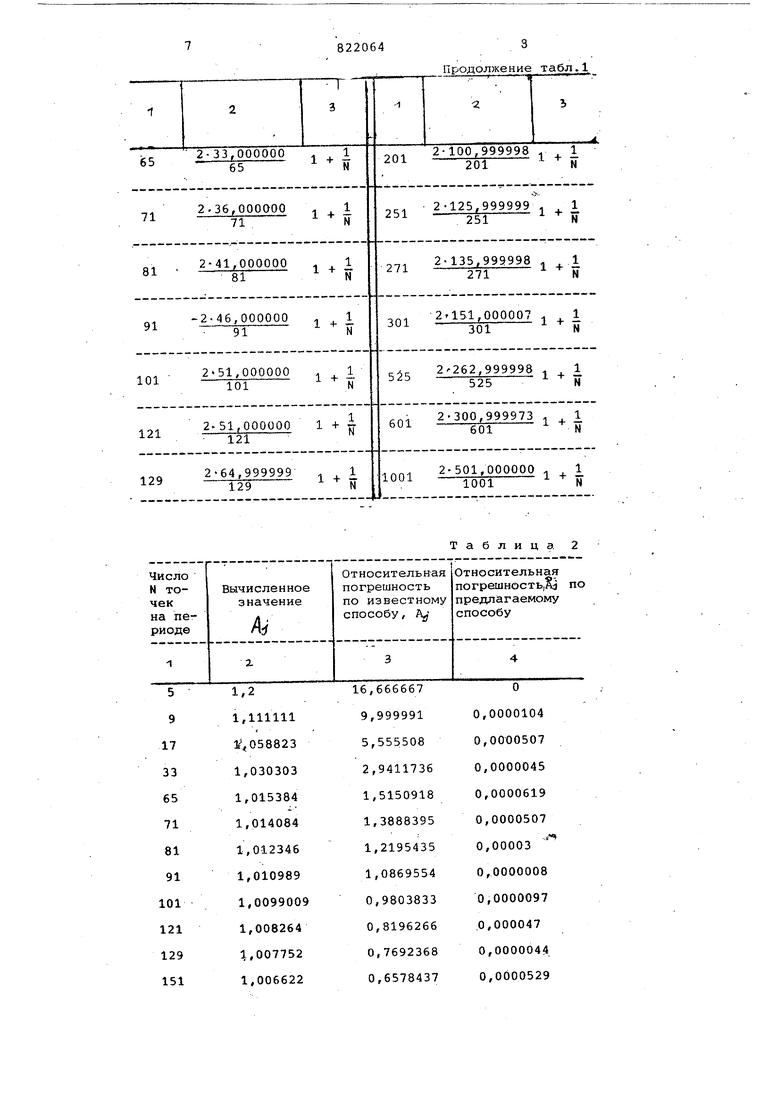
Программное устройство 7 (микропроцессор) выдает периодическую последовательность импульсов, с периодом д t, которые подключают блок 2. через клапанирующиё схемы к соответствующим весовым коэффициентам cos jkit блока 4. Весовой коэффициент блока 4 и интегратор 5 образуют операционный интегрирующий усилител с коэффициентом передачи k эквивалентное cos jkflt. Таким образом удвоенное значение сигнала f(t) в мо мент времени k/st уменьшите пропорц нально cos jkAt и проинтегрируется блоком 5 с учетом знака, выдаваекюг блоком 3. В момент k&t (N - 1)Л1напряжение Uj, накопленное интеграт ром, пропорционально f-i ) косинусной составляющей, затем с блока 7 поступает управляющий сигн в блок б, коэффициент передачи кото рого К -jm- , а на выходе блока 6 будет напряжение , эквивалентное А: косинусной составляющей j-гармоники (С учетом поправки. . Использование предлагаемого способа безрезонаторного определения косинусной составляющей спектра полосового сигнала обеспечивает по сравнению с известными способами следующие преимущества: возможность определить с более высокой точностью AJ косинусную составляющую -и при меньшем числе N узлов аппроксимации что важно при фазовой спектральном анализе; позволяет определить . Aj с . одинаковой точностью для. всех oOj спектра полосового сигнала f(t), что повышает достоверность анализа; позволяет сократить время анализа с со хранением заданной точности; упрощается аппаратурная реализация, так как число элементов и узлов требуТаблицается меньше, чем в аналогичном по назначению устройст.ве при сохранении заданной точности анализа. С целью определения закона изменения точности при увеличении М чьсла выборок мгновенных значений сигнала проведен - нализ на единичной косинусоиде по формуле прямоугольников. , ИЦссс)- .И Расчеты провели на малой ЭВМ типа Наири-К, а результаты представлены в табл. 1. Для оценки эффективности предложенного способа провели расчеты ртно сительной погрешности определения А по известному способу (4) и - по предложенному способу, т.е.с учетом поправки. Результаты расчетов сведены в табл. 2. Анализируя таблицу 1, можно прийти к выводу, что абсолютное значение величины А - косинусной составляющей в зависимости от N приближается по закону AJ А°(1 + if), (5) где - вычисленное значение косинусной составляющей; абсолютное значение косинусной составляющей. Из табл. 2 видно, что при определении косинусной составляющей по пяти точкам относительная погрешность достигает порядка 16,5%, а при ввеении поправки в формулу (4) составяет порядка 0,0005%, т.е. введение поправки существенно снижает погрешность определения А.
Продолжение табл.1
1,2
1,111111
i 05 8823
1,030303
1,015384
1,014084
1,012346
1,010989
1,0099009
1,008264
1,007752
1,006622
Таблица
О
6,666667
0,0000104 9,999991 0,0000507 5,555508 0,0000045 2,9411736 0,0000619 1,5150918 0,0000507 1,3888395 0,00003 1,2195435 0,0000008 1,0869554 0,0000097 0,9803833 0,000047 0,8196266 0,0000044. 0,7692368 0,0000529 0,6578437
Формула изобретения
Способ безрезонаторного определения косинусной составляющей сп ктра полосового сигнала, основанный на периодической выборке мгновенных значений исследуемого сигнала, сравнении с косинусоидальным напряжением заданной частоты ои, уменьшении амплитуды импульсов пропорционально cos out и определении знака для дальнейшего суммирования, о т л и ч а rout и и с я тем, что, с целью повышения точности, исследуемый сигналудваивают по амплитуде, затем выбирают мгновенные значения сигнала с Зсщднным шагом, каждую величину мгновенного значения умножают на
Продолжение табл.2
соответствующий вес cos Jkat, интег грируют с учетом знака и умножают на поправку для j-ой гариюники : спектра с учетом числа выборок на интервсше обработки сигнала.
Источники информации, принятые во внимание при экспертизе
420948, кл. G 01 R 23/00, 16.01.72 (прототип).
дыход устройстба
- lilillJ-
