1 . Изобретение относится к области
автоматики и вычислительной техники и предназначено для сбора и обработки информации, преимущественно для обработки производственной информации в реальном масштабе времени в автоматизированных системах управления
производством и технологическими процессами
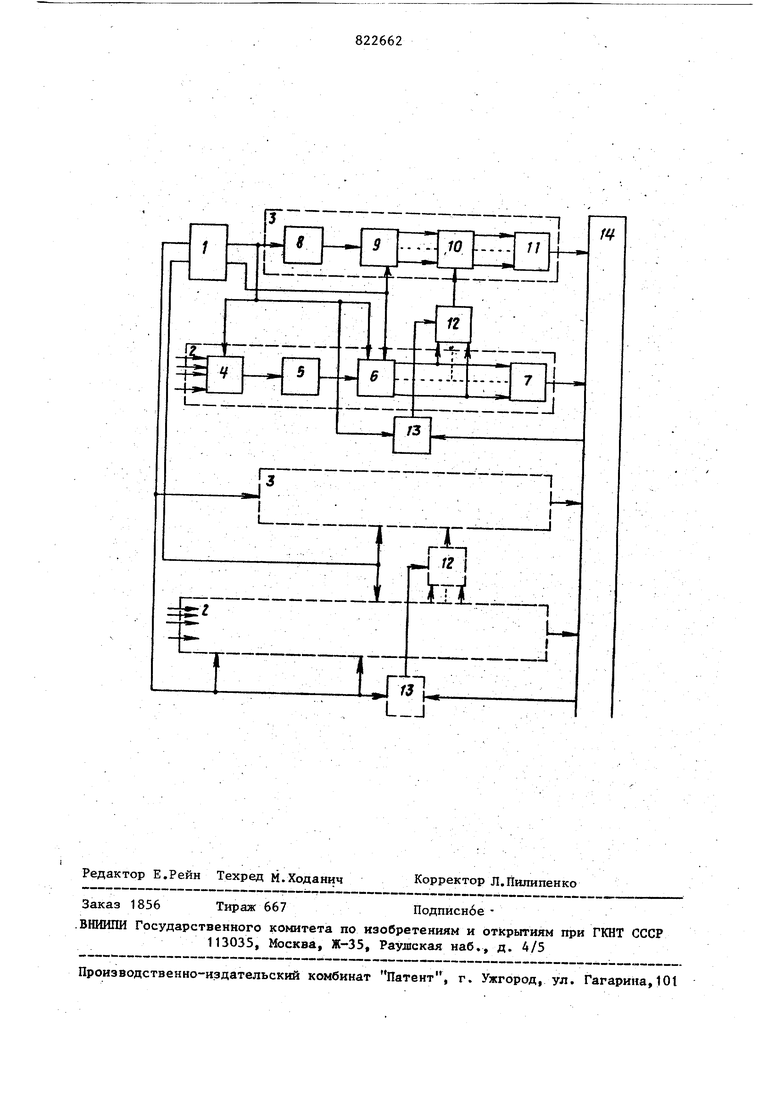
Известны устройства такого рода, представляннциё собой системы обегающего опроса. Причем опрос информации непосредственно с мест ее возникновения осуществляется последовательно по командам ЭВМ, записанным в программном обеспечении системы. Основным недостатком такого рода устройст является большое количество каналов связи между ЭВМ и опрашиваемыми датчиками, а также необходимость работы ЭВМ в режиме непрерывного опроса независимо от наличия или отсутствия на выходах датчиков информации, пред назначенной для сбора и обработки в ЭВМ, Наиболее близкой системой сбора и Обработки информации к предлагаемой системе является система сбора и обработки информации с вычислительной машиной и содержащая блок управления и синхронизации, содержащий генератор пачек импульсов, счетчик, формирователь адреса и блок коммутации, устройства ввода информации, содержа щие группу трахвходовых элементов И, блок опроса, буферный регистр и блок ввода дискретной информации, а также устройстваадресации, каждое ,из Кото рых содержит регистр адреса датчика, группу двухвходовьк элементов И и блок ввода инициативных сигналов, и элементы ИЛИ, входы каждого из ко.торых подключены к выходам соответству кмцей группы трехвходовых элементов И устройства ввода информации, а выход соединен с одним из входов соответствующей группы двухвходовьЬс элементов И устройства адресации. Данное устройство решает задачу уплот нения каналов связи между ЭВМ и датчиками, а также снижения затрат машин ного времени для ввода в вычислитель ную машину информации, так как ввод в нее осуществляется по инициативе самой возникающей информации на- выхо де первичных датчиков, предназначенной для обработки и накопления. Основным недостатком прототипа является пониженная эксплуатационная надежность системы, обусловленная отсутствием сигналов о работоспособности каждого датчика системы и лини связи у обслуживающего персонала и потребителей информации. Цель изобретения - повьштение надежности системы при ее эксплуатации Система сбора и обработки информа ции содержит электронную вычислительную машину, блок управления, п устройство адресации, содержащих детекторы, регистры адреса датчика, , группы двухвходовых элементов И и блок ввода инициативных сигналов, а,также п устройств ввода информации, содержащих блоки опроса,буферные регистры, группы трехвходовых элементов И и блоки ввода дискретной информации, m датчиков, п элементов .ИЛИ, входы которых связаны со всеми выг ходами группы трехвходовых элементов И, а выходы связаны с управляющими входами двухвходовых элементов. И группы, причем К-й выход блока управления (,2,...,п) подключен к входу детектора, управляющим входам блока опроса и входам трехвходовых элементов И группы, а (К+1)-й выход подключен к управляющим входам регистра адреса датчика и трехвходовых элементов И группы, информационный выход детектора подсоединен к входу регистра адреса датчика, а выходы регистра адреса датчика подключены к входам двухвходовых элементов И группы, выходы которых связаны с входами в вода инициативных сигналов, выходы которого подсоединены к первой группе входов электронной вычислительной машины, каждый из датчиков связан с информационными входами блока опроса, выход которого подсоединен к входу буферного регистра, выходы которого подсоединены к входам трехвходовых элементов И группы, выходы которых соединены с входом соответствующего элемента ИЛИ и входами блока ввода дискретной информации, выходы которого подсоединены ко второй группе входов электронной вычислительной машины, п двухвходовых элементов И, первые .входы которых подключены к К-му выходу блока управления, вторые входы подсоединены к соответствующим выходам электронной вычислительной машины, а выходы элементов И связаны с управляющими входами соответствующих элементов ИЛИ. На чертеже приведена блок-схема системы Блок 1 управления подключен соответствующими выходами к устройствам 2 ввода информации и устройствам 3 адресации, числа которых равно соответственно числу групп, в которые объединены все число-импульсные датчики системы. Обычно одна группа соответствует крупной производитель-, ной единице, например цеху, участку. Устройство 2 ввода информации содержит последовательно соединенные
|блок 4 опроса, буферньш регистр 5, группу 6 трехвходовых элементов И и блок 7 .ввода дискретной информации, Каждое устройство 3 адресации содержит последовательно соединенные детектор 8, регистр 9 адреса датчика, группу 10 двухвходвоых элементов И и блок 1V ввода инициативных сигналов, К вь1кодам группы 6 трехвходовых элементов И подключен элемент 12 ИЛИ выход которого соединен с одним из входов группы 10 двухвходовьк элементов И, Элемент 13 совпадения по подключен на вход элемента 12 ИЛИ Выходы блоков 11 инициативных сигналов 7 ввода дискретной информации и вход каждого элемента совпадения 13 соединены с соответствующими шинами ЭВМ 14,
Система работает следующим образом.
Блок 1 управления выполняет следующие функции:
-генерацию на первьк выходах пачек последовательных опросных импульсов, равномерно распределенных в пачке по времени; длительность между пачками равна длительности самой пачки, а количество опросньк. импульсов.в ней соответствует максимальному числу разрядов сообщения каждого число-импульсного датчика;
-распределение пачек опросных импульсов по группам выходов, соответствукяцим группам, в которые объединены число-импульсные датчики; число групп равно числу объектов, на которых установлены датчики (например объектом может быть з асток, цех и т,n,)j распределение во времени пачек опросных импульсов по группам последовательное (т,е, сначала ряд пачек поступает последовательно на один из выходов блока 1,а затем последовательно - на его другой выход и т,д) j число, пачек по одному выходу равно числу опрашиваемых датчиков в данной группе;
-генерацию управляющих единичных сигналов на нижних по схеме вьпсодёх, поступающих во время каждой паузы между пачками опросных импульсов, соответствующих данной группе опрашиваемых датчиков, т,е, в последовательном режиме для всех групп.
Для каждой группы датчиков в устройстве 2 ввода информации блок 4 опроса выполняет функцию последовательной коммутации датчиков на вход буферного регистра 5, В качестве блока 4 опроса может быть использован кольцевой распределитель, сигналами управления для которого служат пачки опросных импульсов, поступающих на его управляющий вход.
Блок 7 ввода дискретной информации представляет собой промежуточное устройство сопряжения входных сигна-, лов с ЭВМ и для ввода их в вычислительную мапшну по ее командам.
В устройстве 3 адресации детектор 8 выполняет функцшо детектирования поступающей на его вход пачки опростектора образуется единичный сигнал с длительностью, равной длительности /пачки,В качестве простейшего детектора может быть использована RC-цепочка,
1Регистр 9 адреса датчика выполняет функции кольцевого двоичного счетчика со счетным входом, число состояний которого равно числу числа-импульсных датчиков, объединенных в даннуюгруппу. Блок 11 ввода инициативных сигналов представляет собой промежуточное устройство сопряжения входных сигналов с ЭВМ и для ввода их в .вычислительную машину по инщщативе самого блока 11,
Функции остальных блоков 6, 10, 12, 13 соответствуют их названиям и не требуют дополнительного пояснения,
В начальном положении регистр 9 адреса датчика в устройстве 3 адресации находится в исходном (нулевом) состоянии,
В момент включения системы в работу блок 1 управления генерирует на своих первых вьшодах пачки опросньк
g импульсов, сначала ряд пачек по одно-му выходу, затем - по другому и т,д, Юэличество пачек по каждому выходу равно числу датчиков, принадлежащих данной группе,, обслуживаемой соответствующими устройствами 2 и 3,
Первая пачка, поступающая на управляющий вход блока 4 опроса, вначале производит коммутацию первого датчика первой группы в линию связи между блоком 4 опроса и буферным регистром 5, Каждый из импульсов в пачке является тактовым по отношению к разрядам первого датчика. Поэтому информация с его выхода переписывается в последовательном коде по линии свя зи в буферный регистр 5. Одновременно из этой пачки опросных импульсов детектор 8 формирует на своем выходе единичный сигнал, поступающий на вход регистра 9 адреса датчика переводя его в первое состояние, при котором на всехего выходах образуется комбинация сигналов, соответствзтощая адресу первого датчика. Эта комбинация (например 1 9 первом разряде при О в остальных) ,В параллельном коде поступает на информационные входы группы 10 двухвходовых элементов И. После окончания первой пачки опросных импульсов с нижнего правого выхьда бло ка 1 поступает единичный сигнал управления на направляющие входы регистра 9 адреса датчика и группы 6трехвходовых элементов И, открывая их . При этом информация из буферного регистра 5 считывается в параллельном коде в блок 7 ввода дискретной инфор мадии, а также поступает на входы элемента. 12 ИЛИ, одновременно со счи тыванием Производится стирание ее в регистре 5. В случае наличия хотя быojq;нoй единицы 1 на выходах группы 6 трехвходовых элементов И (т.е. при наличии подлежащей накоплению и обработке в ЭВМ информации в составе сообщения, переданном от первичного датэлемент ИЛИ срабатывает и сигнал с его выхода поступает на управляняций вход группы 10 двухвходовы элементов И. При этом адрес первого датчика переписывается в параллельно коде в блок 11 ввода инициативньк сигналов. В случае отсутствия 1 на всех выходах группы 6 (что соответствует отсутствию информации по данному дат чику, подлежащей накоплению и обработке) элемент 12 ИЛИ не срабаТьгоает и адрес датчика в блок 11 не поступа ет. С блока 11 инициативный сигнал запроса поступает в ЭВМ в наличия его на любом из вьрсодов блока 11. Этот многоразрядный сигнал (адрес датчика) вызывает в ЭВМ поле памяти, выделенное для записи информации по данному адресу, и по команде от ЭВМ (после ее готовности к приему) информация из блока 7 ввода дискретных сигналов переписывается в вы числительную машину, устанавливая блоки 7 и 11 в исходное (нулевое) состояние. В случае несрабатывания элемента 12 ИЛИ блок 11 подачи в ЭВМ инициативного сигнала не производит. Следующая пачка опросных импульсов, поступающая с верхнего выхода блока 1, производит аналогичный ohpoc всех разрядов второго датчика первой группы с записью соответствующих сигналов вбуферньй регистр 5. Через детектор 8 единичный импульс, поступая на вход регистра 9 адреса датчика, устанавливает его в следующее положение, при этом комбинация сиг- налов на всех его выходах соответствует (в принятой системе кодирования) адресу второго датчика. Далее все операции повторяются рписанньм выше образом. В конце опроса датчиков первой группы соответствующий регистр 9 адреса датчйка возвращается в исходное состояние. : После опроса датчиков первой группы очередная пачка опросных импульсов начинает поступать на следующий верхний вьКод блока 1, производя аналогичные операций со следующей груттпой датчиков и т.д. После поочереднр-го опроса всех групп датчиков блок 1 производит новый цикл опроса и Т.д. в течение всего нериода контроля производственного процесса (смена,сутки и т.п.). Такое постро,ение системы сбора и обработки информации позволяет освободить ЭВМ от принудительного опроса всех датчиков, а подсоёдййённые вычислительной ма-пшны и ввод .в неё информации для накоплёйия и обраббтки производится только при наличии последней на выходе очередного дат- . чика. : , .; , ,... - .-.. ., ;., ,;.. Контроль за состоянием линий связи и работоспособности датчиков информации осуществляется следующим образом. , В сообщении, передаваемом от каждого контролируемого датчика, вьщеляется один (или несколько) разряд, в которьй постоянно записывается сигнал (1) в самом датчике. Выход , соответствующего ему разряда в бу-. ферном регистре 5 подключен через группу 6 трехвходовых элементов И к блоку 7 ввода дискретной йнформаирий. Но связь этого выхода с элементом 12 ИЛИ отсутствует. По команде от ЭВМ 14 (периодичес ки с необходимой частотой по програ ме, либо по инициативному требовани обслуживающего персонала системы) сигнал с выходной шины поступает на один из входов группы элементов 13 Во время опроса каждого датчика опросные импульсы каждой пачки поступают на вход группы элементов 13 И, а с ее выхода - навход элемента 12 ИЛИ, вызывая тем самым принудительный опрос состояний всех разрядов очередного датчика (переписанны в .буферньй регистр 5) независимо от их состояния. Поступающая в ЭВМ информация анализируется на наличие в ней 1 в контрольном разряде. В случае отсутствия 1 в контрольном разряде (обрыв линии связи, неисправность датчика и т.п.) обслуживающий персонал через ЭВМ получает соответствующий сигнал. Например, ЭВМ по программе либо выпечатывает на вькодном устройстве (терминале) информацию об отказе, либо (и) изменяет собственную программу дальнейшей обработки информации, например, исключая ее по данному датчику из общего информационного массива. Таким образом повышается эксплуатационная надежность системы при сохранении остальных преимуществ прототипа (малого количества линий связи, освобождения машинного времени ЭВМ с возможностью его использования для параллельного рещения других задач). Все блоки системы выполнены на известных схемах автоматики и электроники (счетчики, триггеры, клапаны, RC-цепочки, регистры сдвига). Макетирование систe a t производилось на элементарной базе (микросхемы) агрегативной системы вычислительной техники (AGBT), в частйоети комплекса М-6000, М-7000, а также с использованием целиком отдельных стандартных узлов (модулей ввода), входящих в состав этого кошшекса. Модуль ввода дискретной .информации (ШДИ) 16-и разрядный регистр, модуль ввода инициативных сигналов (МВИС) 8-и разрядный.Поэтому в системе при макетировании датчики имели длину сообщения не более 15 разрядов (один разряд - 16-й отводился на контроль системы) и объединялись в группы по 256 .штук (2 - число состояний ИБИС). I , От общего числа датчиков и периодически опроса каждого из них зависит частота следования опросных импульсов (в каждой пачке), которая при испытании макета не превышала 100 кГц.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля работы обору-дОВАНия | 1979 |
|
SU798925A1 |
| Устройство для контроля работы технологического оборудования | 1982 |
|
SU1084846A1 |
| Устройство для ввода информации | 1987 |
|
SU1411726A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ НАПРЯЖЕНИЯ | 1990 |
|
RU2018147C1 |
| Устройство для ввода информации от аналоговых датчиков | 1985 |
|
SU1310796A1 |
| Система управления технологическими процессами | 1982 |
|
SU1104561A2 |
| Устройство для предварительной обработки информации | 1986 |
|
SU1314330A1 |
| МИКРОПРОЦЕССОР ВВОДА-ВЫВОДА ИНФОРМАЦИИ | 1992 |
|
RU2042182C1 |
| Устройство для сопряжения цифровой вычислительной машины | 1987 |
|
SU1444793A1 |
| Устройство для контроля дискретных сигналов | 1989 |
|
SU1672500A1 |
СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ, содержащая электронную вычислительную машину, блок управления, п устройств адресации, содержащих детекторы, регистры адреса датчика, группы двухвходовых элементов И и блоки ввода инициативных Сигналов j а также п устройств ввода информации, содержащих блоки опроса, буферные регистры, группы трехвходо— вых элементов И и блоки ввода дискретной информации, m датчиков, п элементов ИЛИ, входы которых связаны со всеми выходами группы трехвхо- довьпс элементов И, а выходы связаны с управляющими входами двухвходовых элементов И группы, причем К-й выход блока управления (К=1,2,...,п) подключен к входу детектора, управляющим входам блока опроса и входам трех- входовых элементов И группы,а (К+1)-й вьБсод подключен к управляющим входам регистра адреса датчика и трехвходо-вых элементов И группы, информационный выход детектора подсоединен к входу регистра адреса датчика, а выходы регистра адреса датчика подключены к входам двзпсвходовых элементов И группы, выходы кото^лх связаны с входами блока ввода инициативных сигналову выходы которого подсоединены к первой группе входов электг ронной вычислительной машины» каждый из датчиков связан с информационными входами бЛ10ка опроса, выход которого подсоединен к входу буферного речист- ра, выходы которого подсоединены к входам трехвходовых элементов И группы, выходы которых соединены с входом соответствукяцего элемента ИЛИ и входами блока ввода дискретной информации, выхода! которого подсоединены к второй группе входов электронн<Л вычислительной машины, от л и ч а ю- щ а я с я тем, что, с целью увеличения надежности системы в эксплуатации, она содержит п двухвкодовых элементов И, первые входы которых подключены к соответствующим выходам электронной вычислительной машины, а выходы элементов И связаны с управляющими входами соответствующих элементов ИЩ.
