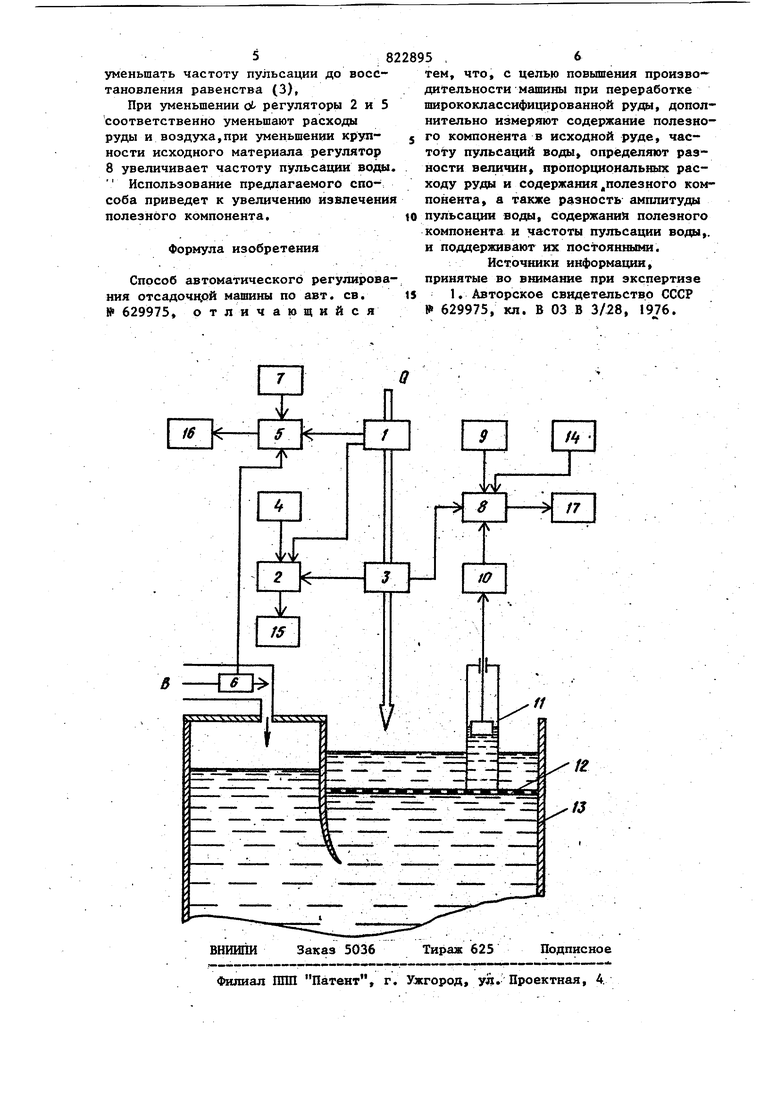
С54)СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ОТСАДОЧНОЙ МАШИНЫ тем, что при ширококлассифицированном исходном материале сопротивление постели может меняться и за счет изменения крупности исходной рудак Установлено что при увели- i чении крупности, частоту пульсации следует уменьшать. Предлагаемый способ предусматривает измерение содержания полезного компонента в исходной руде и соответственно регулирование расхода руды и воздуха. Кроме этого,по сопротивлению постели(амплитуды пульса.1ЩИ воды)оценивается крупность руды и соответственно регулируется частота пульсации, т.е. реализуются следующие уравнения в статике Q-a,,-, О А-а„о -а,, расход руды(йодача руды отсадочную машину в един цу времени); расход воздуха; амплитуда пульсации воды в гидростатической трубе содержание полезного ком понента в исходной руде; частота пульсации воды; о„аа,аьА,йаА - постоянные коэффициенты, опреде ляемые эксперимен тально. На чертеже дана блок-схема автома тической системы, реализующей предла гаемый способ. Автоматическая система включает (датчик 1 расхода руды,регулятор 2 расхода руды, датчик 3 содержания по лезного компонента в исходной руде, задатчик 4 для системы регулирования расходы руды, регулятор 5 соотношени руда - воздух, датч1лк 6 расхода возд ха, задатчик 7 для системы еоотношения руда-воздух, регулятор 8 .частоты пульсации водь, датчик 9 .частоты .пул саций воды, датчик 10 амплитуды;пуль ции воды в гидростатической трубе, гидростатическую трубу 11, решето I2 отсадочной машины, отсадочную машину 13, задатчик 14 для систему регулиро вания частоты пульсации водыJ исполнительный механизм 15 в системе регу лирования соотношения руда-воздух и 5,4 исполнительный механизм 16 в системе (регулирования частотыпульсации воды . Расход руды (исходного материала измеряется датчиком 1, Соответствующий сигнал подается в регулятор 2 расхода который подается сигнал и от датчика 3 содержания полезного компонента в исходной руде..Разность этих сигналов компенсируется сигналом от задатчика 4. Сигнйл от датчика 1 подается также на регулятор 5 соотношения руда - воздух, в который подается сигнал и от датчика 6 расхода воздуха. Отношение зтих двух Сигналов компенсируется сигналом от задатчика 7. Регулятор 8 частоты воды получает сигналы от датчика 3, датчика 9 частоты пульсации и датчика 10 сопротивления постели, выполненного в виде гидростатической трубы 11, установленной на решето 12 отсадочной машины 13. Разность этих трех сигналов компенсируется сигналом от задатчика 14. Первые две системы обеспечивают регулирование расходов руды и воз7 духа в зависимости от содержания по:;1езного компонента в исходной руде, а третья система - регулирование частоты пульсации вода в зависимости от гранулометрического состава (средней крупности обогащаёмого материала, оцениваемого по сопротивлению постели. Допустим, увеличилось содержание. полезного компонента в исходной руде, тогда уменьшится разность G)-oi,()t, на что среагирует регулятор 2i и начнет увеличивать расход руды Q до восстановления равенства ОХ При уве- личенииС регулятор 5 увеличит и расход воздуха до восстановления равенства С ) На изменение содержания полезного компонеита в исходной руде регулятор 8 частоты пульсации воды не реагирует, так как в уравнении (З) увеличивается не только о, но и А за счет увеличения расхода воздуха. Коэффициент а подобран таким образом, что разность А - в устаиовившемся режиме остается постоянной. Допустим, увеличилась крупность исходного материала, тогда уменьшится сопротивление постели и поэтому уменьшиться амплитуда пульсации воды А в гидростатической трубе, что повлечет за собойуменьшение разности в уравненяи(З), На это . среагирует регулятор 8 и начнет
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического регулирования отсадочной машины | 1981 |
|
SU1005907A2 |
| Способ автоматического регулирования отсадочной машины | 1988 |
|
SU1546147A2 |
| Способ автоматического регулирования работы отсадочной машины | 1980 |
|
SU921626A1 |
| Способ автоматического регулирования отсадочной машиной | 1976 |
|
SU629975A1 |
| Способ автоматического управления колебательным процессом отсадочных машин | 1981 |
|
SU968921A1 |
| Способ отсадки минеральных частиц | 1989 |
|
SU1660740A1 |
| СПОСОБ ОБОГАЩЕНИЯ МАРГАНЦЕВЫХ РУД | 2003 |
|
RU2237520C1 |
| Способ автоматического регулирования водовоздушного режима процесса отсадки | 1980 |
|
SU1045478A1 |
| Способ управления процессом обогащения в многокамерной отсадочной машине | 1982 |
|
SU1080870A1 |
| Устройство для измерения разрыхленности постели в отсадочной машине | 1977 |
|
SU664685A1 |
