(54) СПОСОБ КОНТРОЛЯ ФОРМЫ ПОВЕРХНОСТЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для восстановления голо-гРАММ | 1978 |
|
SU848998A1 |
| Способ получения интерферограмм | 1969 |
|
SU344791A1 |
| Способ контроля отклонения формы поверхности детали | 1980 |
|
SU938008A1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| ГОЛОГРАФИЧЕСКИЙ ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ ПЛОСКОЙ ПОВЕРХНОСТИ ЭЛЕМЕНТОВ ТВЕРДОТЕЛЬНОЙ ЭЛЕКТРОНИКИ | 2009 |
|
RU2406070C1 |
| Голографический интерферометр | 1989 |
|
SU1749701A2 |
| Способ контроля формы поверхности | 1989 |
|
SU1656320A1 |
| Голографический способ определения изменения состояния объекта | 1991 |
|
SU1788431A1 |
| ДИФРАКЦИОННЫЙ ИНТЕРФЕРОМЕТР (ВАРИАНТЫ) | 2003 |
|
RU2240503C1 |
| ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЙ С ОБЪЕМНОЙ ГОЛОГРАММОЙ | 1999 |
|
RU2169348C1 |
Изобретение относится к .гологра4 1И, может быть использовайо, в частности для расшифровки голографических янтерферограмм при измерении фо1ялы поверхности. Известен способ контроля формы яов хностей путем регистрации гологргвЮАв образцовой поверхности восстаеювяеиия изображения и совмещения с крнтроушруемой поверхностью. Способ расшифровки и нтерферограммы основан на том/ что интерференционные полосы, вызванные перемещением объекта, локализуются на некотором расстоянии позади изображения. Измерив зто расстояние, а также ширину полос в направлении координат, рас-, читывают все три компоненты смещения объекта 1}. Основным недостатком этого Метода является то, что его нельзя- применит если интерференционные полосы яаходя ся на прверх( объекта или локали ются близко к налу. Кроме того, в этом методе необходимо О1 ределять плоскость локализации полос, что выполнить, с большой точностью сложно, Погрешности измерений по этой причине велики и составл вот . Частично Зтй недостатки устраняются в методе счета интерференционных полос, В нем используется не действитель ное положё нйе Пл оскос ти л окали з ации интерференционных полос, а параллакс между полосами. Чере з край голограммы и выбранную точку изучаемой поверхности наблюдают локализованную за изображением объекта интерференционную .картину.- Линию визирования постепенно (мещают к другому краю голограммы и одновременно считают количество полос, прошедших через выбранную точку. По измеренным величинам определяют смещение объекта. Однако и этот способ расшифровки интерферограмм не может быть использован, когда полосы локализованы на поверхности объекта или близко к нему . Кроме того, Ън очень нё- рчен, для измерения компоненты вдольлинии визирования. Наиболее близким по технической сущности к предлагаемому является , способ контроля формы поверхностей путем формирований- искусственной гологреилмы образцовой поверхности, восстановления образцового фронта и сравнения его с волновым фронтом контролируемого объекта 2.
njJH расшифровке на объекте выделят точку, остающуюся неподвижной в вух экспозициях. Тогда разность ода лучей для нее между экспозицией равна нулю; Отклсшения любой точки на контролируерюм объекте определяется путем счета интерференционных полос от неподвижной «точки до исслеуемой. В случае когда выЯелить йеподвижн1яо точку . невозожно , приходится либо производить съетики объекта на три «зависимых голоРра В аг либо при трех разяичньк направлениях освецшоадего пучка- на одну голограмму.
Недостатками данного способа расшифровки интерферогра ш являгатсЯ необходимость использования трех отдельных голограмм, сложность вычмслеянйу а также сложность экОнериментаЛьных устройств,; в
Кроме того i точность расишфровкй голографических интерферограмм способом - низкая«
Цель изобретения - упров«енйе pae-iиифровки интерферограмм .и увлечение точности.
Цель достигается тем, что контролируемый объект поворачивает на угол в пределах от 0,5 до 25 Шн; вокруг оси касательной к его поверхности, а отклонение формы объекта определяют по отклонению интёрфёренционяой полосы, проходящей ч&рез ггочку касания, от теоретической кривой, проходящей через ту же точку.
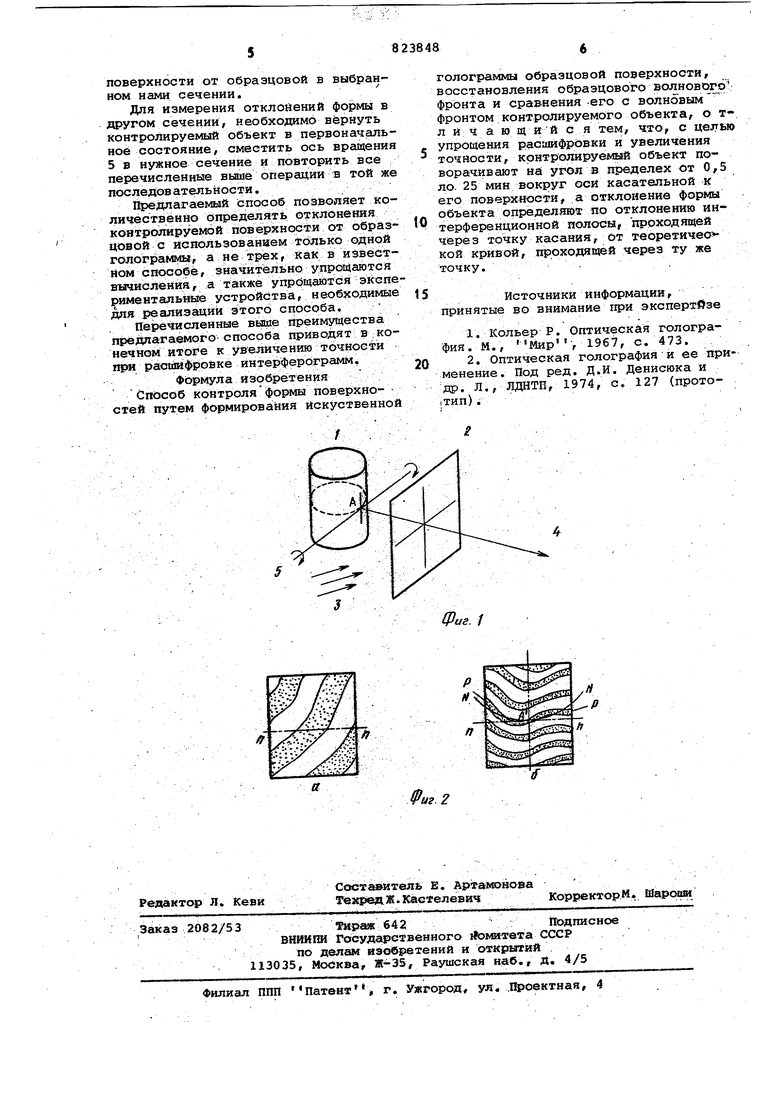
На фиг, 1 схематически представяе
но устройство для «оличвственяой расшифровки йнтерФерогргидав; на фй, 2 интерферограк ва контролируемого объ- . екха.- : . i -. ; ,
Устройство. контроляруемый объект 1, голограмму 2 пучок 3, наблюдатель 4, ось 5 ращения контролируемого объекта, точку д, касания оси эр эШнйя с nosepxнсзстью контролируемого объекта.
Кроме обоэваченш проекция пп оси вращения объекФа проекция Я точки касания оси с поверкностыо объекта интерференционная полоса РР проходящая через неподвижную точку след NN Ссимо11ересечения образцовой поверхности в исхояном и иоверйутом ее положениях,
Способ контроля формы поверхностей осуществляется слеяу1вЦ184 образом.
Собирают обычную сх««у к мнтроля формой поверхн эст1| методом голorjpaфической интерферосиетрйя (фиг, 1). Рассмотрим случай контрвяя адлйндаической поверхности,
Волновой фронт, сфор вированйый контролируекял объектти 1, сравнивается с образцовым вояновымФроитом, восстановленным с голограммы 2 опорным пучком 3, При эт«я«1, если волновые фронты (контролируемый и об1разйовый) близки по форне, .они интерферируют и наблюдатель 4 фиксирует интерференционную картину (фиг, 2а),
Интерференционные полосы характеризуют отклонения фориш контролируемой поверхности от образцовой. Если на объекте нельзя вьаделить неподвижной точки, то в этом случае количественно определить отклонения контролируемой поверхности от об раэцо8ОЙ трудно, а 8 большинстве случаев и невозг«эжж
Предлагав шй способ расашфровки позволяет искусственно выделить непояви н 49 точку. Для этого выбирают интересующее сечеиие на объекте для количествен«ой расашфровки отклонений контролируемого объекта от обрашового этом сечении и поворачивают объедет i вокруг оси 5, проходящейчереэ иатйм еоующее нас сечение касательно к поверхности объекта, Яапр влвйие ос 5 выбирают таким, чтобы плоскость, проходящая через ось вращения к линию визирования, пеfxeoeKana контролйруемкй объект в интересующем нас сечеиии. Кроме того, ось враадеййя параллельна Плоскости голограшш. При таком повороте об ъекта 1 вокруг оси 5, точка А, в которой ось касается поверхности объекта остается неподвижной и ее можно зафиксировать на йитерферограмме (фиг, 2в, точка А ).
Йаблюдаемаа интерференционная карти«а (ф«г, 26) является результатом сда женйя откломений формы контролируемого объекта от образцового (фиг, 2а) и известного искусственного смещения, BtaafSasHoro аовсч отом контролируемого объекта, ЕСЛИ бы форма контролируемого (Эбъекта точно совпадала с образцовом, в этом случае форма интерфе| еяааонной полосы , проходящей через неподвижную точку касания А (Фй1, 26) полностью определялась бы фо|я«эй образцовой поверхности и йзвестиам углом поворота Объекта (ливая ИВ,Фиг. 26), Например, если в качестве контролируемого объекта выбран кругойой цкшядр, то Е этом случае |1нте1;4 ре{тио«(«ая полоса Ш представляет собой часть параб.олы, парамет Ш которой полностью огереде лядатся радиусом образцового цилиндра, параметрами схемы и углом поворота цилиндра,вокруг оси 5, ДруE4iMK словами, мы можем легко рассчитать форму кривой NN. Если в качестве объекта вь«&рана плоскость, а в этом случае яияия Ш представляет собой прямую и т.д, В любом случае тания Ш имеет форму следа сгвйопересечения образцовой поверхности в исходном и повернутом ее положениях. Таким образом, отклсжения интерференционной полосы РР проходящей чефез неподвижную точку Аот теоретически расчитайной Ш однозначно характеризуют отклонения контролируемой
поверхности от образцовой в выбранном нами сечении.
Для измерения отклойений формы в другом сечении, необходимо вернуть контролируемый объект в первоначальное состояние, сместить ось вращения 5 в нужное сечение и повторить все перечисленные выше операции в той же последовательности.
Предлагаемый способ позволяет количественно определять отклонения контролируемой поверхности от образ цовой с использованием тбяько одной голограшш, а не трех, Как в известном способе, значи;тельно упрощаются вычисления, а также упрощаются экспериментальные устройства, необходимые для реализации этого способа. ;
Перечисленные выше яреимущества предлагаемого способа щ иводят в конечном итоге к ув еличению точности при расшифровке интерферограмм.
Формула изобретения Способ контроляформы поверхностей путем формирования йскуственной
Гголограммы образцовой поверхности, восстановления образцового волновог о фронта и сравнения -его с волновым фронтом контролируемого объекта, о тл и ч а ю щ ий с я тем, что, с цель упрощения расшифровки и увеличения точйойти, контролируемый объект поворачив ают нб угол в пределех от 0,5 ло. 25 мин вокруг оси касательной к его поверкяостй, а отклоиенйе формы объекта определяют по отклонению интерференционной полосы, проходящей через точку касания, от хеоретичео кой кривой, проходящей через ту же точку,. .
5 Источники информации,
принятые во внимание при экспертизе
20 2. Оптическая голография и ее применение. Под ред. Д.И. Денисюка и
- др. Л., ЛДНТИ, 1974, с, 127 (прото|ТИП) .
(Риг.1
Фиг 2
