f
Изобретение относится к вибрацион ной технике, а именно к двухкомпонент ным вибростендам для воспроизведения плоскостных вибрационных нагрузок при помощи одного вибратора, предназначенным для испытания изделий на вибропрочность и виброустойчивость,
Известен двухкомпонентный вибро-- стенд, содержащий вибратор направленного действия, связанную с ним платформу, стол для установки испытуемого изделия, смонтированный на платформе с возможностью перемещения в направлении, перпендикулярном направлению действия вибратора, двуплечий рычаг, одно плечо которого связано с платформой, тягу для соединения второго плеча рычага со столом 1,
Недостатком данного вибратора является сложность настройки вибрационного режима.
Наиболее близким к предлагаемо является двухкомпонентный вибростенд, содержащий вибратор направленного действия, связанную с ним платформу,, стол для установки испытуемого изделия, смонтированный на платформе с возможностью перемещения в направлении, перпендикулярном направлению действия вибратора,двуплечий рычаг.
одно плечо которого связано с платформой, тягу для соединения второго плеча рычага со- столом, устройство для изменения длины связанного с плат,формой плеча Двуплечего рычага 2.
Вибростенду данной конструкции свойственны- недостатки, обусловленные тем, что фазы вертикальной (активная
0 координата) и горизонтальной (пассивная координата) составляющих двухкомпонентной вибрации, действующей на испытуемое изделие, всегда одинаковы. Это ограничивает функциональ5ные возможности вибростенда, так как траектория движения центра масс стола стенда (независимо от характера , изменения во времени вибрационного процесса вдоль активной координаты)
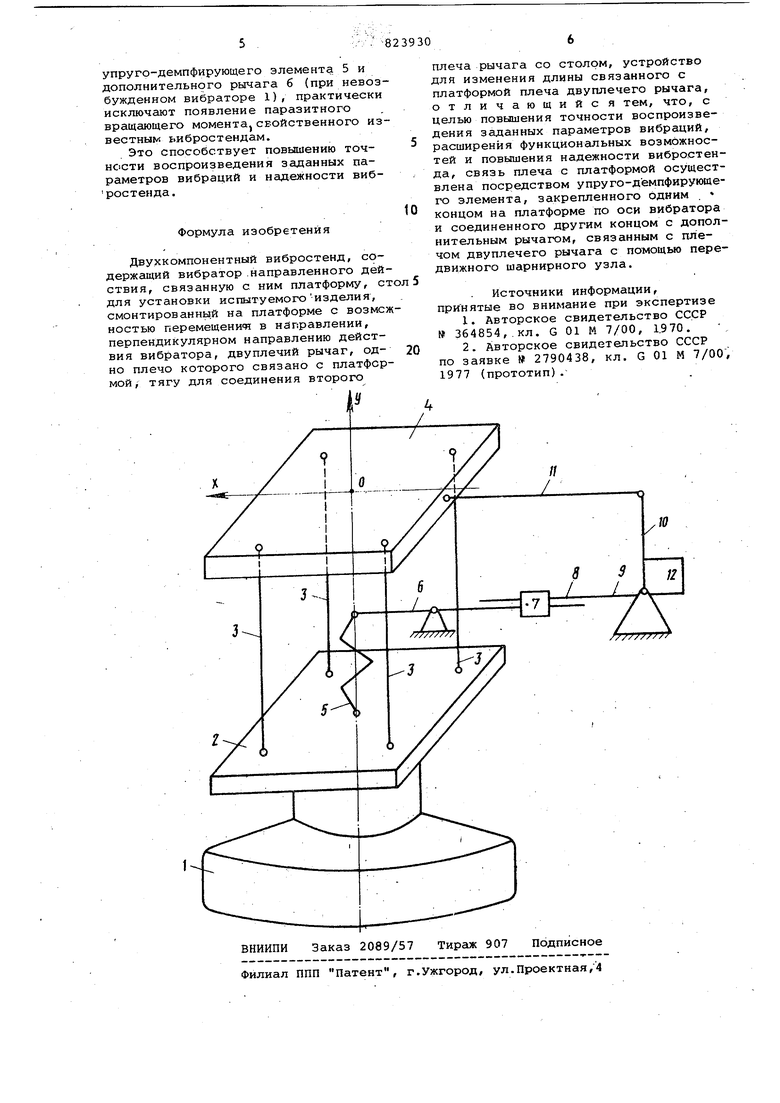
0 всегда лежит на прямой, наклон которой определяется коэффициентом передачи двуплечего рычага. Идентичность фазочастотных характеристик вибростенда вдоль активной и пассивной коор5динат обусловливает также недостаток, заключающийся в совпадении резонансных режимов работы вибростенда по активной и пассивной координатам, У данного вибростенда резонансные час0тоты вдоль активной и пассивной координат органически не могут быть смещены друг относительно друга. Кроме того, в результате изменения коэффициента передачи двуплечего рычага, точка контакта платформы вибратора с пешьцем, который связан с плечом двуплечего рычага, смещаетс вдоль пассивной координаты. Это обус ловливает появление паразитного вра щающегд момента N gp (t) hF(t) (h - смещение точки контакта относительно вертикальной оси вибратора, F(t) -- сГила взаимодействия платформы вибратора с пальцем), приложенного к подвижной системе вибратора. Момент Mgp(t) вызывает появление вредных угловых вибраций подвижной . системы вибратора, что ухудщает точность воспроизводимых вибраций и снижает надежность вибростенда. Цель изобретения - повышение точности воспроизведения заданйых параметров вибраций, расширение функциоНсшьных возможностей и повышение надежности вибростенда Поставленная цель достигается тем что связь плеча с платформой осуществлен а посредством упруго-демпфирующего элемента, закрепленного одним концом на платформе по оси вибратора и соединенного другим концом с допол нительным рычагом, связанным с плечом двуплечего рычага с помощью передвижного шарнирного узла. На чертеже изображен предлагаемый двухкомпонентный вибростенд. Вибростенд содержит вибратор 1 направленного действия, связанную с ним платформу 2, на платформе 2 смон тирован с помощью упругих стержней 3 жзстких в продольном и упругих в поперечном направлениях стол 4, служащий для крепления испытуемого изде лия (на чертеже не показано), На пла форме 2 по оси вибратора 1 закреплен одним концом упруго-демпфирующий злемент 5, другой конец которого соединен с дoпoлнитeJ ьнfcJM рычагом 6, До полнительный рычаг 6 связан посредст вом передвижного шарнирного узла 7 с плечом 8 двуплечего рычага 9, Другое плечо 10 двуплечего рычага 9 связано со столом 4 с помощью тяги 11, Для и менения длины плеча 8 двуплечего рычага 9 слущ-кт устройство 12, Вибростенд работает следукяцим образом. Стол 4 через платформу 2 и упруги стержни 3 получает колебательное дви жение в направлении оси действия виб ратора 1, Одновременное колебательно движение стола 4 в направлении, перпендикулярном оси действия вибратора 1, возбуждается при помощи упруго-, демпфирующего элемента 5 дополнитель ного рычага 6, двуплечего рычага 9 и тяги 11, 8 4 Длина 8 регулируется вручную либо автоматически при помощи устройства 12, Вибрационный .процесс x(t) вдоль пассивной координаты определяется уравнением d-x(t) dx(t) г + Kj-x(t) b-y(t) где y(t) - колебания платформы 2 вдоль активной координаты, b и h коэффициенты жесткости и демфирования упруго-демпфирующего элемента 5/ К, Ко, - приведенные коэффициенты жесткости демпфирования и инерции механизма передачи колебательных движений от активной и пассивной координат, который включает упруго-демпфирующий элемент 5, дополнительный рычаг 6, двуплечий рычаг 9, тягу 11 и стол 4. Приведенные коэффициенты зависят от коэффициентов жесткости и демпфирования упруго-демпфирующего элемента 5, массы стола 4, .моментов инерции и геометрических размеров элементов механизма передачи. В соответствии с выражением (1) амплитуда и фаза вибрационного процесса x(t) определяется для заданного y(t) Ay. sinu)t величинами коэффициентов К, К, К, Ъ и h. Изменением указанных коэффициентов,путем увеличения (уменьшения) коэффициента передачи двуплечего рычага 9, выполнение упруго-демпфирующего элемента 5 с непрерывно, либо дискретно регулируемыми коэффициентами жесткости и демпфирования, можно регулировать фазовый сдвиг между процессами y(t) и x(t) в диапазоне от нуля до 180°, Это позволяет обеспечить вибрационные перемещения центра масс испытуемого объекта по различным траекториям: отрезок прямойJэллипс,окружность. Кроме того, для заданного y(t) AyV X sinuit изменением коэффициентов К , 0. Ъ можно смещать резонансную частоту вибратора по пассивной координате относительно резонансной частоты по активной координате. Указанные моменты значительно расширяют функциональные возможности вибростенда. Коэффициент переда ш между вибрацирнными процессами вдбль активной и пассивной координат у вйбростенда регулируется изменением коэффициентов жесткости и демпфирования упруго-демпфирующего элемента 5 и длины плеча 8 двуплечето рычага 9. Эти изменения при совпадении оси симметрии упругодемпфирующего элемента 5 с вертикальной осью вибратора 1 и взаимной перпендикулярности осей симметрии
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкомпонентный вибростенд | 1977 |
|
SU728015A1 |
| Двухкоординатный вибростенд | 1985 |
|
SU1288522A1 |
| ВИБРОСТЕНД | 1996 |
|
RU2118806C1 |
| Трехкоординатный вибростенд | 1979 |
|
SU849030A1 |
| Вибростенд | 1974 |
|
SU682782A1 |
| Способ управления динамическим состоянием технологической вибрационной машины и устройство для его осуществления | 2018 |
|
RU2711832C1 |
| ДВУХКОМПОНЕНТНЫЙ ВИБРОСТЕНД | 1973 |
|
SU364854A1 |
| ДВУХКООРДИНАТНЫЙ ВИБРОСТЕНД | 1993 |
|
RU2116639C1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| Пьезоэлектрический вибростенд | 1989 |
|
SU1747977A1 |
