Изобретение относится к вибрационной технике и может быть использовано для контроля динамического состояния вибрационных технологических машин.
Вибрационные технологические машины широко используются во многих производствах: строительной индустрии, добыче и переработке полезных ископаемых, горнорудной промышленности, металлургии и др. [1, 2]. Эффективность работы вибрационных машин существенным образом зависит от настройки, что обеспечивается возможностями выбора и построения вибрационных полей рабочих органов или возможностями управления распределением амплитуд колебаний точек по длине рабочего органа машины. Ряд исследований в этом направлении нашел отражение в работах [3, 4]. Конструктивно-технические варианты решения таких задач динамики связаны с введением в структуру технологических машин дополнительных связей в виде различного рода механизмов и устройств для преобразования движения и создания рычажных связей. Управление структурой вибрационных полей является во многом задачей поиска и разработки способов и средств целенаправленного формирования динамических свойств механических колебательных систем с несколькими степенями свободы, имеющих в своем составе массоинерционные элементы в виде твердых тел, совершающих сложные движения плоских и пространственных форм [3, 4].
Теоретические аспекты формирования структуры вибрационных полей, особенности распределения амплитуд колебаний по длине рабочего органа, особенности расположения узлов колебаний, оценки влияния связности внешних возмущений, динамические эффекты взаимодействия элементов систем нашли отражение в работах последних лет [1, 2, 5, 6], что в определенной степени, инициирует развитие методов математического моделирования, как основы оценки динамических возможностей в настройке вибрационных полей технологических машин.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известно изобретение [Серга Г.В., Резниченко С.М. «Вибрационная установка для обезвоживания сыпучих материалов», патент №2591959 С1, МПК B01D 33/03, B01D 35/20, приоритет 20.07.2016], содержащая смонтированный на основании фильтр, загрузочное приспособление, разгрузочные приспособления для отвода фильтра и сгущенной фракции, фильтр упруго установлен на платформе с вибратором, смонтированным горизонтально под платформой, и выполнен спиральным из пустотелого перфорированного тоннеля с многозаходной винтовой перфорированной поверхностью по периметру свернутого по спиральной оси вокруг центральной прямолинейной оси спирального фильтра, снабженного винтовыми канавками внутри под углом к его спиральной оси в виде карманов криволинейной формы с центрами кривизны, расположенными внутри поперечного сечения пустотелого перфорированного тоннеля, и собран из секций в виде одинаковых по форме и размерам перфорированных колец, свернутых из одинаковых перфорированных полос ромбовидной формы, на которых размещены трапеции, боковые струны которых расположены на боковых сторонах ромбовидной перфорированной полосы, а верхние и нижние основания трапеции расположены под острым углом к оси симметрии ромбовидной перфорированной полосы и являются линиями сгиба, находящихся на расстояниях друг от друга, равных длине карманов криволинейной формы по внутренней перфорированной поверхности перфорированного пустотелого тоннеля спирального фильтра, при этом секции в виде колец соединены друг с другом боковыми сторонами трапеций. Техническим результатом изобретения является повышение производительности и расширение технологических возможностей вибрационной установки.
К недостаткам данного изобретения можно отнести использование только одного вибрационного возмущения при работе вибрационной технологической машины и отсутствие возможности регулирования интенсивности вибрационного воздействия.
Известно устройство для автоматической настройки и поддержания резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя [Пановко Г.Я., Шохин А.Е., Бармина О.В., Еремейкин С.А., Горбунов А.А. «Устройство для автоматической настройки и поддержания резонансных режимов колебаний вибрационной машины с приводом от асинхронного двигателя», патент №2589639 С1, МПК В06В 1/14, приоритет 10.07.2016], содержащее блок управления, частотный преобразователь электроэнергии, два датчика положения дебаланса, датчик колебаний, установленный на рабочем органе вибромашины. Согласно изобретению, датчики положения дебаланса выполнены в виде двух оптопар, установленных на корпусе электродвигателя в точках, расположенных симметрично относительно оси вращения дебаланса на горизонтальной линии, проходящей через эту ось, а дебаланс выполнен с отверстием, центр которого расположен на линии, соединяющей центр вращения и центр масс дебаланса в точке, соответствующей оси чувствительности оптопар, причем датчик колебаний и датчики положения дебаланса соединены с входами блока управления, выход которого соединен с управляющим входом частотного преобразователя, силовой вход которого соединен с внешним источником электропитания, а выход частотного преобразователя соединен с асинхронным двигателем. Технический результат направлен на автоматическую настройку и поддержание резонансных колебаний рабочего органа вибрационной машины, возбуждаемых дебалансным инерционным вибровозбудителем с приводом от асинхронного электродвигателя, при изменении параметров механической системы вибромашины за счет управления частотой питающего напряжения.
К недостатками данного изобретения можно отнести отсутствие возможности регулирования приведенной жесткости системы и невнимание к вращательной степени свободы рабочего органа вибрационной машины.
Известна полезная модель [Шевцов С.М., Ереско С.П. «Вибростенд», патент №86737 U1, МПК G01M 7/06, приоритет 10.09.2009], Данное техническое решение направлено на создание устройства, создающего линейные вибрации на испытуемом изделии и позволяет повысить точность воспроизведения режимов испытаний, упростить конструкцию вибростенда. Это достигается за счет того, что в качестве вибратора вибростенда использован электродвигатель (например, постоянного тока) с кривошипно-шатунным механизмом, в котором кривошип установлен с возможностью перемещения по направляющей в виде улитки Паскаля.
К недостаткам данной полезной модели можно отнести отсутствие автоматического регулирования режимов испытаний.
За прототип принимается способ управления характеристиками вибрационного поля [Елисеев С.В., Елисеев А.В., Хоменко А.П., Артюнин А.И., Пнев А.Г., Кашуба В.Б. «Способ управления работой вибрационной машины при разгрузке сыпучих материалов из вагонов», патент №2624829 С1, МПК G01M 7/00, приоритет 07.07.2017], включающий установку на поверхности рабочего стола датчиков, фиксацию параметров вибрационного движения рабочего органа, отличающийся тем, что производят одновременную фиксацию сигналов с датчиков, расположенных на рабочем органе, с обязательной фиксацией измеряемого движения одной направленности, изменяя массоинерционные свойства рабочего органа путем перемещения вдоль перпендикулярных направляющих пригрузов, осуществляют управление характеристиками вибрационного поля.
Устройство для реализации способа управления характеристикой вибрационного поля включает рабочий орган, жестко соединенный с вибратором, датчики, отличающееся тем, что вдоль краев рабочего стола установлены пригрузы с возможностью передвижения по команде с блока управления при поступлении информации от датчиков о необходимости изменения характеристики вибрационного поля.
Основным недостатком данного изобретения достаточная сложность реализации представленного способа, а также отсутствие возможности получения однородного вибрационного поля.
Задачей изобретения является контроль динамического состояния вибрационной технологической машины при помощи регулирования длины плеча рычажного механизма.
Способ управления динамическим состоянием технологической вибрационной машины и устройство для его осуществления, включающий возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию параметров ее динамического состояния, отличающийся тем, отличающийся тем, что производят настройку соотношения амплитуд колебаний между координатами движения вибрационной машины для получения единичного значения согласно информации, поступающей с датчиков контроля динамического состояния в блок управления, и производят настройку соотношения между этими амплитудами до получения режима синхронной работы вибрационной технологической машины по двум координатам, причем регулируют приведенную жесткость системы за счет изменения изменения длины рычажного механизма.
Устройство для реализации способа по п. 1, отличающееся тем, что на опорной поверхности располагается упругая система рабочего органа, состоящая из двух перпендикулярно расположенных и опирающихся в точке соединения на пружину шарнирно-рычажными механизмов, один из которых соединен со стойкой и пружиной, также расположенными к нему перпендикулярно, а на другом конце к нему присоединена пружина, соединенная с рабочим органом, причем изменение длины рычага осуществляется на основе данных, поступающих в блок управления и обработки информации от датчиков контроля динамического состояния, находящихся на рабочем органе, и позволяет регулировать приведенную жесткость системы и обеспечивать для рабочего органа вибрационной технологической машины согласованную работу двух координат движения.
Суть изобретения поясняется чертежами
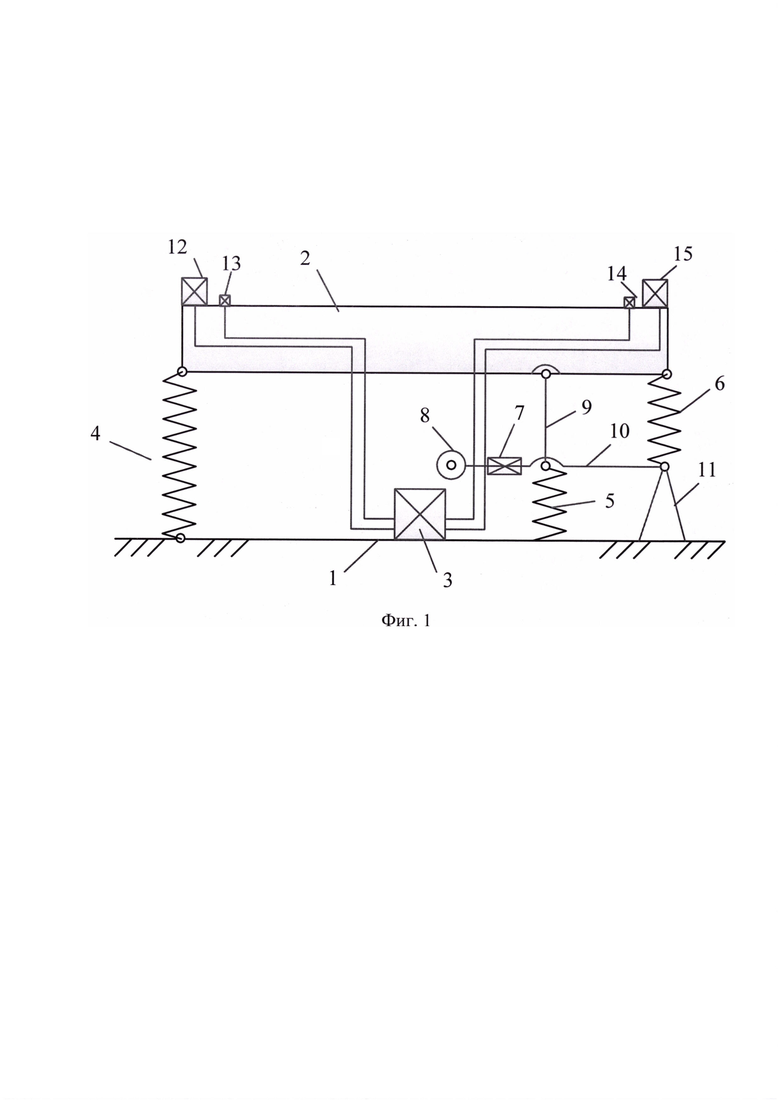
На фиг. 1 представлена принципиальная схема, содержащая опорную поверхность 1, рабочий орган вибрационной машины 2, блок управления и обработки информации 3, пружины 4, 5, 6, устройство для изменения длины рычага 7, дополнительную массу 8, рычаг первого рода 9, рычаг второго рода 10, стойку 11, 12, вибровозбудители 12, 14, датчики контроля динамического состояния 13, 15.
На фиг. 2 приведена расчетная схема механической колебательной системы с дополнительными рычажно-инерционно-упругими связями.
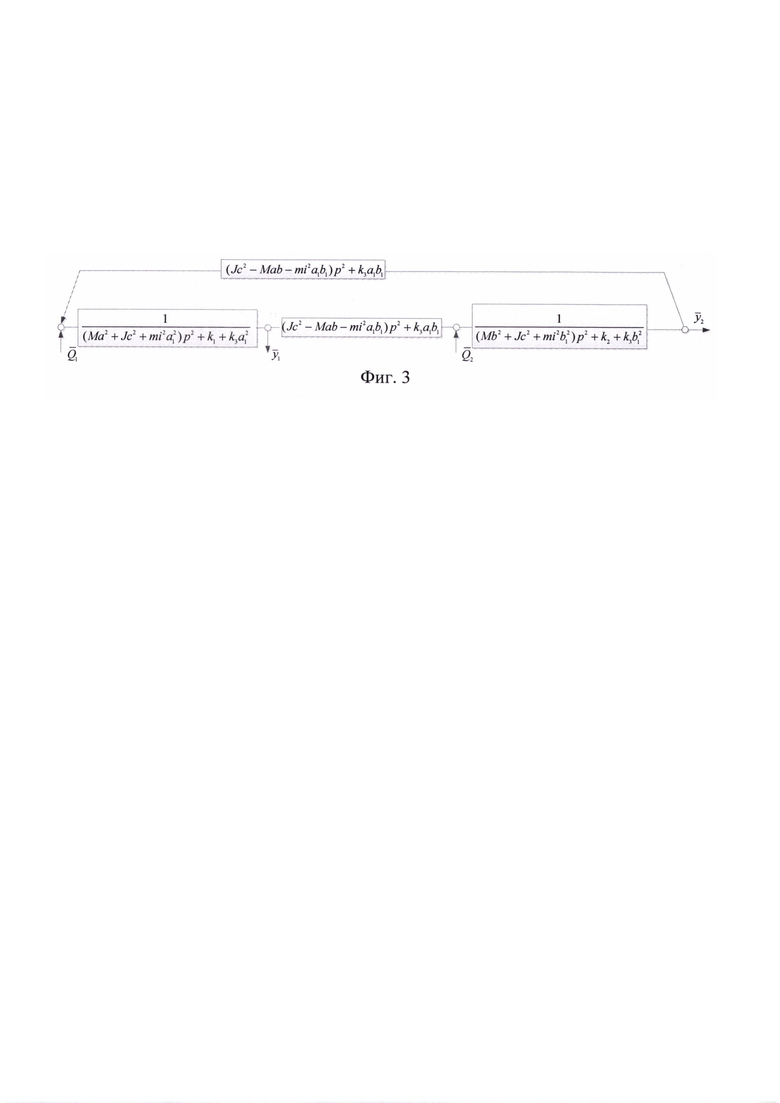
На фиг. 3 показана структурная математическая модель (структурная схема) исходной механической системы по фиг. 2.
Изобретение работает следующим образом.
Вибрационные процессы на рабочем органе 2, инициируются двумя инерционными возбудителями 12 и 15. Рабочий орган 2 контактирует с опорной поверхностью 1 с одной стороны через пружину 4, а с другой через упруго-рычажный каскад, состоящий из рычагов 9 и 10, соединенных между собой под прямым углом и опирающихся в точке контакта на пружину 5. Рычаг 9 также крепится к рабочему органу 2. Рычаг 10 также опирается в крайней точке на стойку 11, и в этой же точке к стойке 11 прикреплена пружина 6, соединенная верхним концом с рабочим органом. На другом конце рычага 10 расположена дополнительная масса 8.
Изменение приведенной жесткости производится посредством изменения длины плеча рычага 10, которая регулируется устройством для изменения его длины 7 в зависимости от поступивших в блок управления и обработки информации 3 данных, полученных с датчиков контроля динамического состояния 13, 14. Изменение длины рычага может производиться вручную или в автоматическом режиме для получения режима связности координат движения в виде  что распространяется на весь частотный диапазон.
что распространяется на весь частотный диапазон.
Более подробно суть изобретения раскрыта при помощи математического моделирования, приведенного в теоретическом обосновании.
Теоретическое обоснование
1. Рассматривается расчетная схема вибрационной технологической машины (фиг. 2), основу которой составляет твердое тело массой М и моментом инерции J, опирающееся на упругие элементы k1 и k2. Возбуждение колебаний объекта в системе координат у1 и у2 осуществляется двумя вибраторами Q1 и Q2 соответственно.
В структуру механической колебательной системы вводится дополнительная связь, представляющая собой рычаг первого рода, на конце которого размещается пригруз массой m. Положение пригруза на рычаге может также изменяться с помощью специального устройства; в тт. Е, Е1 рычаг соединяется дополнительной тягой с объектом (М, J); рычажный механизм подпружинивается через элемент k3 в т. Е. Геометрические параметры системы приведены на схеме (фиг. 2).
Для построения математической модели системы запишем выражения для кинетической и потенциальной энергий системы


где у0=ay1+by2, ϕ=с(у2-у1), у1=у0-l1ϕ, у2=у0+l2ϕ, yE1=у0-l0ϕ, 
Перепишем (1), (2) в форме

где 
Таким образом

Примем, что а1=а+l0c, b1=b-l0c



Математическая модель системы может быть построена на основе формализма Лагранжа [5, 6] и в системе координат у1, у2 имеет вид


2. После преобразований Лапласа при нулевых начальных условиях система уравнений (7), (8) может быть представлена в операторной форме


где

Структурная математическая модель исходной системы по фиг. 2 в виде структурной схемы эквивалентной в динамическом отношении системы автоматического управления, приведена на фиг. 3 ((р=jω - комплексная переменная (j=√-1).
3. Используя структурную схему на фиг. 3, запишем передаточные функции системы, полагая, что между внешними силовыми факторами  и
и  , в виде синфазных гармонических функций, существует отношения связности, когда
, в виде синфазных гармонических функций, существует отношения связности, когда

где α - коэффициент связности внешних сил, который может принимать положительные, отрицательные и нулевые значения.
Запишем передаточные функции системы в обобщенном виде
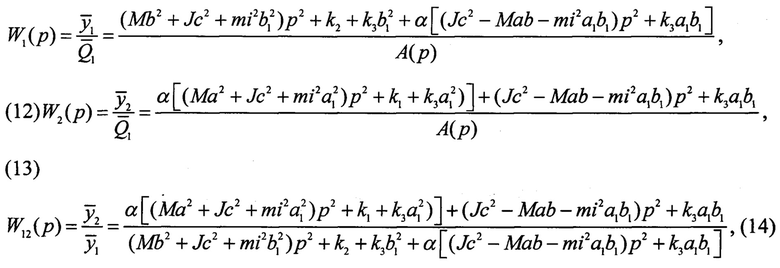
где

- является частотным характеристическим уравнением системы.
Анализ выражения (14) показывает, что необходимое соотношение между координатами движения, при котором становится возможным выполнение условия  В этом случае вибрационное поле имеет однородную структуру; при этом угловые колебания твердого тела не реализуются (ϕ=0). Реализация такого режима возможна при варьировании настроечных параметров, в качестве которых могут быть выбраны коэффициент связности внешних факторов α, а также передаточное отношение рычага i.
В этом случае вибрационное поле имеет однородную структуру; при этом угловые колебания твердого тела не реализуются (ϕ=0). Реализация такого режима возможна при варьировании настроечных параметров, в качестве которых могут быть выбраны коэффициент связности внешних факторов α, а также передаточное отношение рычага i.
Таким образом введение дополнительных связей упруго-рычажной природы можно рассматривать как способ настройки, коррекции и управления динамическим состоянием рабочего органа вибрационной технологической машины. Способ обладает достаточно большим потенциалом вариативных возможностей и может быть при необходимости переведен на автоматическую настройку.
Список литературы
1. Пановко Г.Я. Лекции по основам теории вибрационных машин и технологий. М.: МГТУ им. Баумана, 2008. - 192 с.
2. Копылов Ю.Р. Динамика процессов виброударного упрочнения: монография / Воронеж: ИПЦ «Научная книга», 2011. - 569 с.
3. Ганиев Р.Ф. Волновые машины и технологии (Введение в волновую технологию). Москва, научно-издательский центр «Регулярная и хаотическая динамика», 2008, - 192 с.
4. Ивович В.А. Виброизоляция горно-обогатительных машин и оборудования. М.: Недра, 1978. 252 с.
7. Елисеев С.В., Кашуба В.Б., Кинаш Н.Ж., Елисеев А.В. Динамическое гашение колебаний: введение дополнительных связей, рычажные взаимодействия и физические эффекты // Вестник Иркутского государственного технического университета. 2017. Т. 21. №1 (120). С. 10-23.
8. Елисеев А.В., Кашуба В.Б., Кинаш Н.Ж., Елисеев С.В. Особенности динамических свойств рабочих органов технологических машин при инерционном возбуждении колебания // Вестник Донского государственного технического университета. 2016. Т. 16. №4 (87). С. 63-71.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Устройство для формирования вибрационного перемещения рабочей среды | 2021 |
|
RU2773825C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| Способ корректировки распределения амплитуд колебаний рабочего органа вибрационного технологического стенда и устройство для его реализации | 2018 |
|
RU2716368C1 |
| Способ настройки распределения амплитуд колебаний рабочего органа вибростенда и устройство для его осуществления | 2018 |
|
RU2695899C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Устройство формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2753843C1 |

Группа изобретений относится к области машиностроения. Возбуждают колебания рабочего органа вибрационной технологической машины и регистрируют параметры ее динамического состояния. Производят настройку соотношения амплитуд колебаний между координатами движения вибрационной машины. Производят настройку соотношения между этими амплитудами до получения режима синхронной работы вибрационной технологической машины по двум координатам. Регулируют приведенную жесткость системы за счет изменения изменения длины рычажного механизма. Устройство содержит опорную поверхность. Упругая система рабочего органа состоит из двух перпендикулярно расположенных и опирающихся в точке соединения на пружину шарнирно-рычажных механизмов. Датчики контроля динамического состояния расположены на рабочем органе. Достигается контроль динамического состояния вибрационной машины. 2 н.п. ф-лы, 3 ил.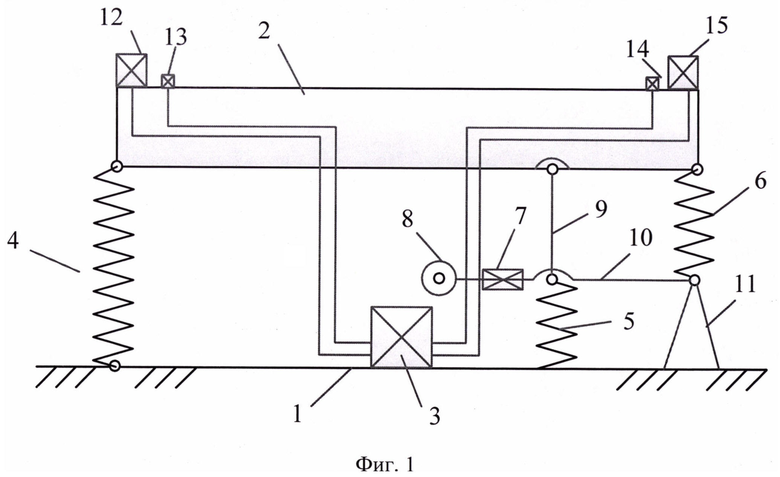
1. Способ управления динамическим состоянием технологической вибрационной машины, включающий возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию параметров ее динамического состояния, отличающийся тем, что производят настройку соотношения амплитуд колебаний между координатами движения вибрационной машины для получения единичного значения согласно информации, поступающей с датчиков контроля динамического состояния в блок управления, и производят настройку соотношения между этими амплитудами до получения режима синхронной работы вибрационной технологической машины по двум координатам, причем регулируют приведенную жесткость системы за счет изменения длины рычажного механизма.
2. Устройство для реализации способа по п. 1, отличающееся тем, что на опорной поверхности располагается упругая система рабочего органа, состоящая из двух перпендикулярно расположенных и опирающихся в точке соединения на пружину шарнирно-рычажных механизмов, один из которых соединен со стойкой и пружиной, также расположенными к нему перпендикулярно, а на другом конце к нему присоединена пружина, соединенная с рабочим органом, причем изменение длины рычага осуществляется на основе данных, поступающих в блок управления и обработки информации от датчиков контроля динамического состояния, находящихся на рабочем органе, и позволяет регулировать приведенную жесткость системы и обеспечивать для рабочего органа вибрационной технологической машины согласованную работу двух координат движения.
| Способ управления характеристикой вибрационного поля и устройство для его осуществления | 2015 |
|
RU2624829C1 |
| US 4793653 A, 27.12.1988 | |||
| JP 2007247733 A, 27.09.2007 | |||
| Дисковый прерыватель постоянного тока | 1922 |
|
SU2282A1 |

