1 .
Изобретение относится к автоматическому регулированию, в частности к системс1М автоматического регулирования с применением электромеханических регуляторов.
Известно интегрирующее устройство, исключающее погрешности интегрирования, обусловленные напряжением трогания двигателей, содержащее опорный двигатель, редуктор, интегрирукадий двигатель, датчик углового положения, сумми)ующий -усилитель и источник стабилизирован ного напряжения Cll
Недостатком устройства является повышенная сложность кинематической схемы и увеличенные габаритен, связанные с наличием двух двигателей.
Наиболее близким по техническая сущности к предлагаемому является интегрирующее устройство, содержащее последовательно соединенные резистор, операционный усилитель, выходной усилитель, интезтрирукйций двигатель и датчик углового положения. Между входом и выходом оперсщибвного усилителя включена цепь его обраной связи, в которой последовательно включены нелинейный элемент и переменный резистор; В качестве не
линейного элемента использованы два встречно-параллельно включенных диода 2.
Недостатком устройства является S нестабильность постоянной времени интегрирования, в ее зависимости от величины входного сигнала, что снижает точность интегрирования. , У интегрирующего устройства тем Е I меньше зона нечувствительности, чем меньше входной сигнал вызывает трргЧ гавие интегрируклдего двигателя и,следовательно, чем меньше ток проходит по нелинейному элементу в ре15 Симе трогания.
; Дяя уменьшения зоны нечувствител; нести интегрирующее устройство настраивается таким образом, что напряжение трогания двигателя коы20 пенсируется падением напряжения на нелинейном элементе, которое соответствует криволинейному участку ег вольт-амперной характеристики.
При этом зависимости приращения 25 напряжения, подводимого к интегрирукадему двигателю, и скорости этого двигателя от приращения входного сигнала отличаются от линейных. постоянная времени интегрирую30 1щего устройства в области малых
ВХОДНЫХ сигналов уменьшаемся с цветом входного сигнала, асимптотически приближаясь к установившейся величине.
ЁЩе одним недостатком известного устройства является сложность его настройки. Устройство не позволяет производить независимо друг от друга две операции: согласование падения напряжения на нелинейном элементе с напряжением трогания двигателя и регулирование постоянной времени интегрирования.
При изменении коэффициента усиления выходного усилителя изменяются сразу две величины - постоянная времени интегрирования и входной сигнал, при котором происходит трогание двигателя (величины зоны нечувствительности) , и необходимо производить дополнительное регулирование коэффициента усиления операционного усилителя.
Цель изобретения - повышение точности интегрирования.
Поставленная цель достигается тем что в интегрирукндееустройство, содержащее операционный усилитель, вход которюго через первый масштабный регулятор соединен со входом устройства, и последовательно соединенные сумматор, интегрирукхций двигатель . датчик углового положения, введены инвертируювщй усилитель, ограничитель напряжения и два источника постоянного тока, соединенные последовательно и подключенные к входам $адания уровня ограничения ограничителя напряжения, включенного между выходом операционного усилителя и первым входом сумматора, второй вход которого через инвертирующий усилитель соеяинеи со входом устройства.
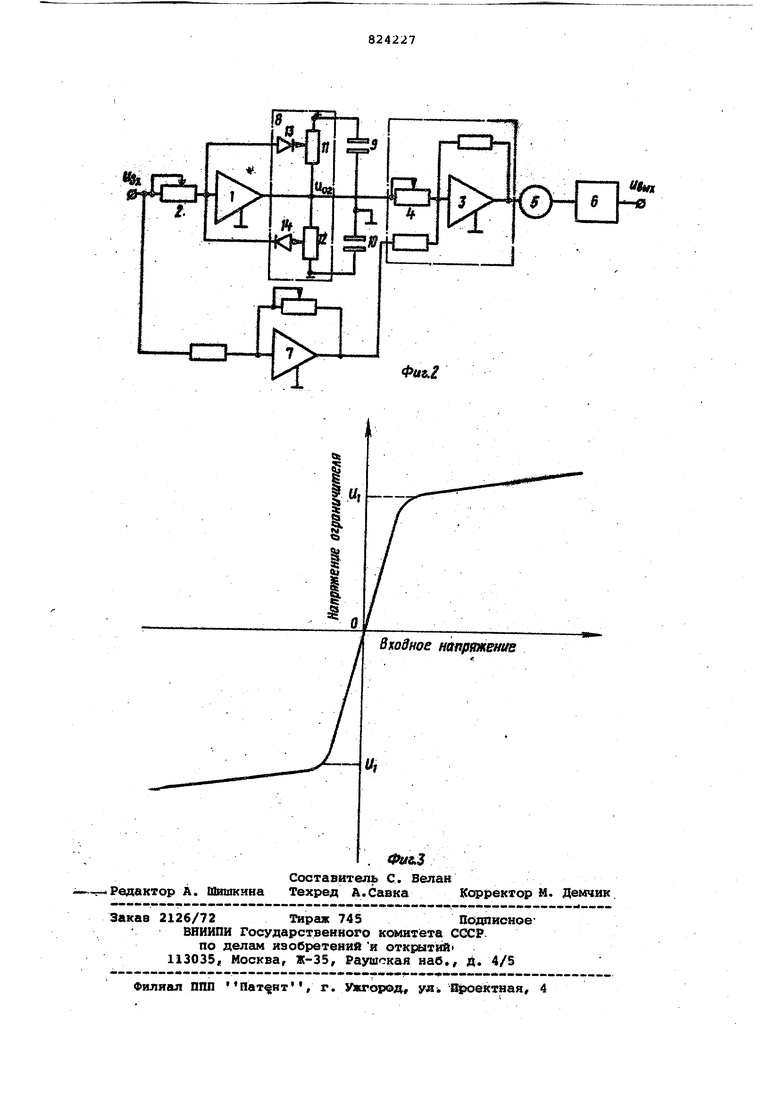
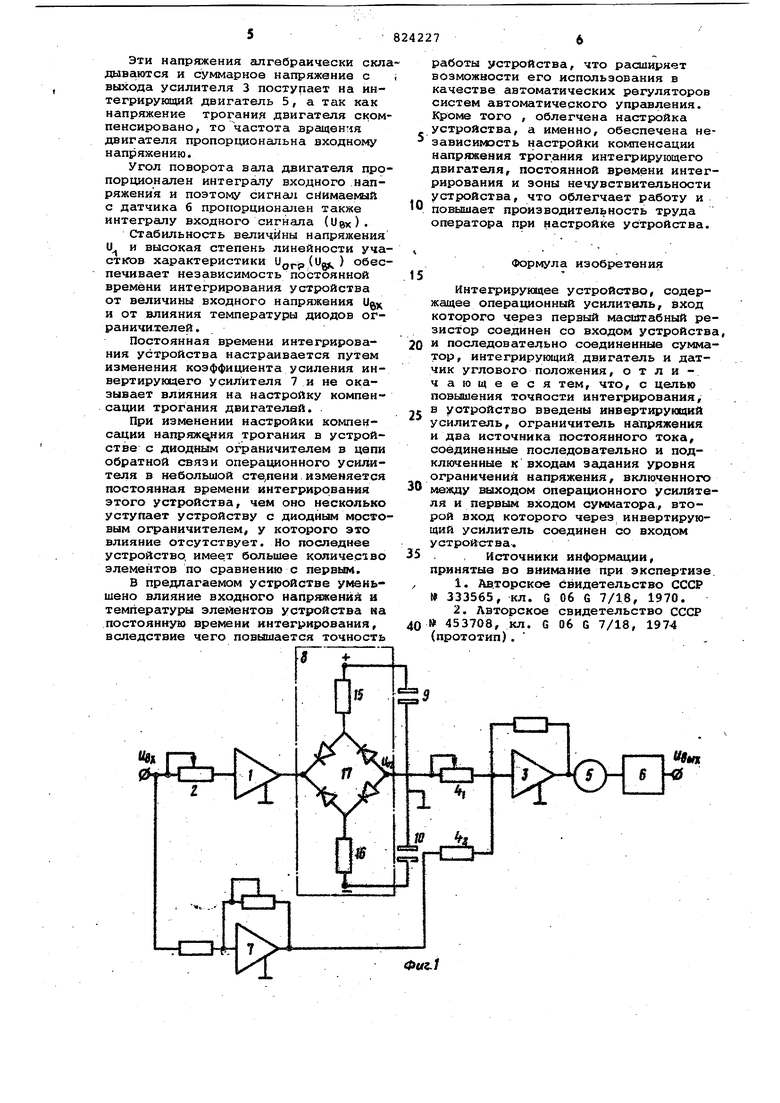
На фиг. i представлена Функциональная интегрйру1ов)его устройства с диодным ограничителем в цепи обратно связи операционного усилителя/ на фиг. 2 - и «7егри{ ующее устройство с диодным мостовым огра.ничителем, включенным 1 1ежду операционным и выходшям усилителями; на фиг. 3 - зависимость нащ яжвния на выходе ограничителя от величита входного напряжения.
Интегрируки ее устройство содер. т операционные усилитель 1 с масштабньш резистором 2, одии конец которого является входом устройства, а другой соединен с точкой суммирования усилителя 1, а также сумматор, выполненный на усилителе 3.5 масштабными резисторами 4 и 4,интегрирующий двигатель 5, подкл1эченный к выходу усилителя 3, причем вал двигателя 5 соединен с датчиком 6 углового Положения, выход которого является выходом устройства, инвертирукядий усилитель 7, вход которого подключен ко входу устройства, а выход ко второму входу усилителя
3,и ограничитель 8, подключенный
к источникам 9 и 10 постоянного тока и к выходу усилителя 1.
Ограничитель 8 в цепи обратной связи операционнЪго усилителя содержит два потенциометра 11 и 12, движки которых через диоды 13 и 14 соединены с точкой суммирования операционного усилителя 1.
Диодный мостовой о1 ракичитель содержит резисторы 15 и 16 и мост 17 из четырех диодов.
При подаче на вход устройства входного напряжения иgx на выхода ограничителя 8 появляется напряжени УОГР зависимость которого от U,
вх показана на фиг. 3.
У этой зависимости очень крутой начальный участок (U -и., ) и его крутизна оперделяется значительной величиной коэффициента усиления операционного усилителя 1 и может изменяться путем изменения величины масштабного резистора 2.
Напряжение U, при котором имеет место излом характеристики, составляет часть напряжения источников 9 и 10 постоянного тока и определяется настройкой движков потенциометро 11 и 12 или соотношением резисторов
4,15 и 16.
Настройкой и изменяется зона нечувствительности устройства - та величина входного напряжения, при котором интегрирующий двигатель 5 начинает вращаться.
Статизм двух других участков
JOTP и ° ° ределяется отношением части сопротиления потенциометров 11 н 12 от выхода усилителя 1 до движков потенциометров к сопротивлению входного резистора 2, а для устройства с дионым мостовьоч ограничителем статизм этих участков равен нулю.
КриволииеИность начальных участков вольт-амперных характеристик дидов ограничителей и изменение величины ладения напряжения в этих диоДс1х при изменении температуры практически не оказываются на характеристике Uoro (( ех ) падение напряжения на диодах ограничителя во много раз меньше напряжения 1Ц .
Напрюкение UOPP поступает на вхо усилителя 3, причем величина этого напряжения настраивается таким образом, что после умножения ее на коэффициент усиления выходного усилителя 3, она равна напряжению трогания интегрирукяцего двигателя 5. Через инвертирующий усилитель на второй вход выходного усилителя 3 поступает также вторая составляющая напряжения, которая пропорциональна входному напряжению Uex.
Эти напряжения алгебраически складываются и суммарное напряжение с выхода усилителя 3 поступает на интегрирующий двигатель 5, а так как напряжение трогания двигателя скомпенсировано, то Частота вращения двигателя пропорциональна входному напряжению.
Угол поворота вала двигателя ПР9 порционален интегралу входного напряжения и поэтому сигнал сйимаемлй с датчика б пропорционален также интегралу входного сигнала ().
Стабильность величины напряжения и и высокая степень линейности участков характеристики Ugpp (UM ) обеспечивает независимость поЬтоянной времени интегрирования устройства от величины входного напряжения Ug и от влияния температуры диодов ограничи.телей.
Постоянная времени интегрирования устройства настраивается путем изменения коэффициента усиления инвертирующего усилителя 7 и не оказывает влияния на настройку компенсации трогания двигателай.
При из1«нении настройки компенсации напряж ия трогания в устройстве с диодным ограничителем в цепи обратной связи операционного усилителя в небольшой сте,пени изменяется постоянная времени интегрирования этого устройства, чем оно несколько уступает устройству с диоднь мрстовым ограничителем, у которого это влияние отсутствует. Но последнее устройство, имеет большее количество элементов по сравнению с первым.
В предлагаемом устройстве уменьшено влияние входного напряжения и температуры элементов устройства ма постоянную времени интегрирования, вследствие чего повышается точность
работы устройства, что расширяет возможности его использования в качестве автоматических регуляторов систем автоматического управления. Кроме того , облегчена настройка устройства, а именно, обеспечена независимость настройки компенсации напряжения трогания интегрирующего двигателя, постоянной времени интегрирования и зоны нечувствительности устройства, что облегчает работу и повышает производительность труда оператора при настройке устройства.
Формула изобретения
15
Интегрируивдее устройство, содержащее операционный усилитель, вход которого через первый масштабный резистор соединен со входом устройств
20 и последовательно соединенные сумматор, интегрирующий двигатель и датчик углового положения, отличающееся тем, что, с целью повышения точности интегрирования, в уотройство введены инвертирующий
25 усилитель, ограничитель напряжения и два источника постоянного тока, соединенные последовательно и подключенные к входам задания уровня ограничения напряжения, включенного
30 между выходом операционного усилителя и первым входом сумматора, второй вход которого через инвертирующий усилитель соединен со входом устройства-.
35
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 333565, кл. G 06 G 7/18, 1970.
2.Авторское свидетельство СССР 453708, кл. G Об G 7/18, 1974
40 (прототип). 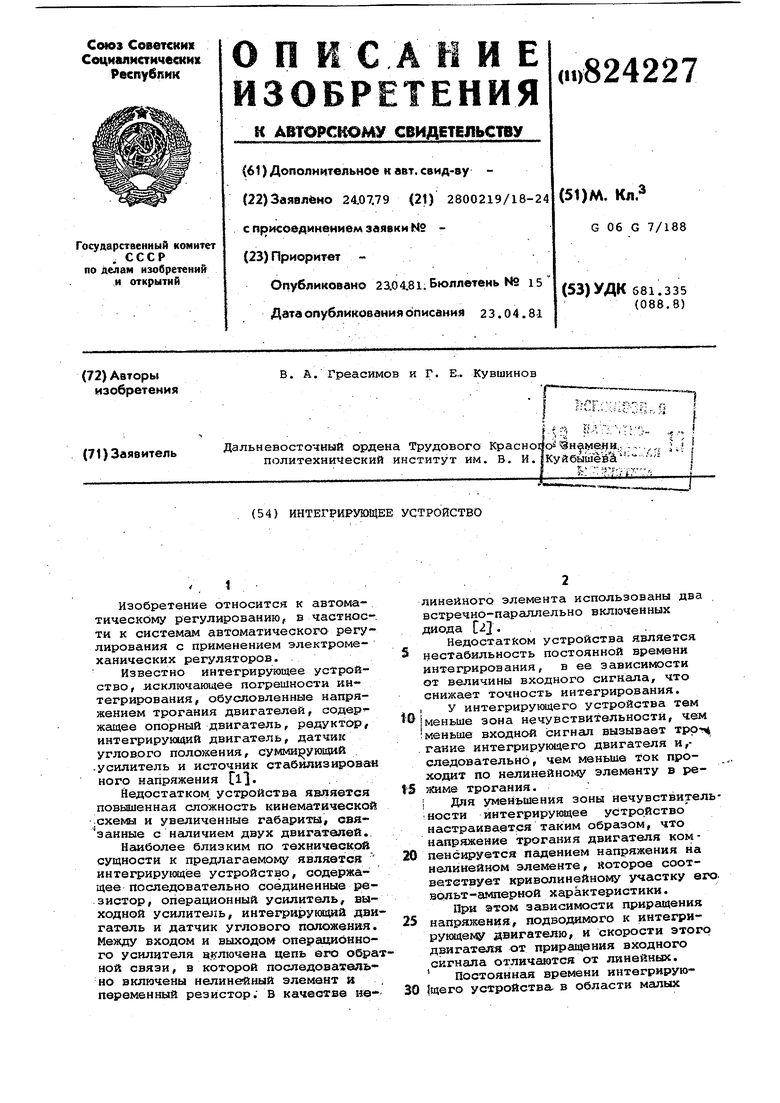
| название | год | авторы | номер документа |
|---|---|---|---|
| Функциональный преобразователь | 1988 |
|
SU1534476A1 |
| Универсальный диодный функциональный преобразователь | 1977 |
|
SU696491A1 |
| Устройство для формирования зоны нечувствительности | 1984 |
|
SU1238114A1 |
| Интегратор | 1982 |
|
SU1035614A1 |
| Диодный функциональный преобразователь | 1978 |
|
SU734732A1 |
| Функциональный преобразователь | 1980 |
|
SU920764A1 |
| Функциональный аналого-цифровой преобразователь | 1983 |
|
SU1113813A1 |
| Устройство для моделирования тиристора | 1983 |
|
SU1091190A1 |
| Множительное устройство | 1980 |
|
SU924720A1 |
| Многоканальный функциональныйпРЕОбРАзОВАТЕль | 1979 |
|
SU840952A1 |