XI
00 00
о
XI
Изобретение относится к электротехнике и может быть использовано для осущест- вления динамического торможения мощного синхронного двигателя, имеющего на статоре две системы обмоток.
Известные электроприводы с синхронным двигателем, в которых возможен режим динамического торможения, содержащие синхронный генератор с трехфазной обмоткой, выводы которой подключены ко входам мостовогб тиристорного выпрямителя. Выходы выпрямителя через дроссели соединены со входами мостового тиристорного инвертора, к выходам которого подключена трехфазная, соединенная в звезду обмотка синхронного двигателя, Между нейтралями обмоток синхронных генератора и двигателя включен тормозной резистор.
В режиме торможения катодная группа инвертора и анодная группа выпрямителя запираются, анодная группа инвертора переводится в выпрямительный режим, катодная группа выпрямителя - в инверторный, при этом ток течет через тормозной резистор, и мощность, поступающая уже от двигателя частично рекуперируется, а частично расходуется в тормозном резисторе.
Как частный случай, возможен вариант работы катодной группы выпрямителя с углом управления, равным 90 эл.град. При этом мощность, поступающая от двигателя, не возвращается в сеть, а только расходуется в тормозном резисторе.
Рассмотренному устройству присущи три недостатка. Во-первых, невозможно осуществление чистого динамического торможения. Действительно, если по условиям питающей сети невозможна рекуперация энергии (например, случай дизель-генератора), то катодная группа должна работать с углом управления, близким к 90 эл.град. При этом от сети дополнительно потребля- ется реактивная мощность, пропорциональная току (моменту) торможения, что иногда не желательно
Во-вторых, поскольку в режиме торможения работает только анодная группа инвертора (т.е. схема инвертора становится нулевой), увеличиваются пульсации момента двигателя, вибрация, ухудшается гармонический состав тока и появляется нескомпенсированный поток подмагничи- вания синхронной машины,
В-третьих, аналогично, работа выпрямителя в нулевом режиме отрицательно влияет на сеть.
Другой известный электропривод содержит источник переменного напряжения с двумя трехфазными соединенными в звезду обмотками, нулевые точки которых соединены через тормозной резистор. К фазным выводам указанных обмоток подключен двенадцатипульсный тиристорный преобразователь частоты с непосредст- венной связью. Последовательно с реверсивными мостовыми группами преобразователя частоты включены полуобмотки фаз статора двигателя, а также обмотки
0 двухобмоточных дросселей, причем к двум одноименным выходным зажимам реверсивных вентильных групп в каждой фазе преобразователя частоты присоединены одноименные концы полуобмоток фазы
5 электродвигателя, вторые одноименные концы полуобмоток фазы двигателя подключены к разноименным выводам обмоток дросселя, вторые выводы которых подключены к двум другим одноименным зажимам
0 реверсивных вентильных групп той же фазы преобразователя частоты.
В режиме торможения запираются анодные группы тиристоров мостов, подключенных к первой обмотке источника, и
5 катодные группы тиристоров мостов, подключенных ко второй обмотке источника. Оставшиеся в работе группы тиристоров обеспечивают формирование токов двигателя, причем одна полуволна фазного тока
0 двигателя течет по одной полуобмотке, а другая полуволн а - по другой полуобмотке. Через тормозной резистор при этом протекает сумма модулей фазных токов двигателя. Токи статора сдвинуты по фазе
5 относительно ЭДС двигателя так, что осуществляется передача энергии от двигателя (через преобразователь частоты) к источнику. При этом в дополнение к динамическому торможению может быть осуществлено и
0 рекуперативное.
Данное устройство имеет аналогичные недостатки. Во-первых, в режиме торможения также происходит обмен реактивной мощностью с сетью, т.к. тормозной ток про5 текает по фазным обмоткам источника. Во- вторых, при торможении увеличиваются пульсации выпрямленного напряжения и тока (ухудшается гармонический состав). В-третьих, для реализации данного уст0 ройства необходимо наличие источника в виде двух гальванически развязанных трехфазным систем обмоток, что существенно увеличивает установленную мощность силового оборудования.
5 Наиболее близким по технической сущности к заявляемому решению является электропривод, содержащий синхронную машину электрическую с двумя статорными трехфазными обмотками, сдвинутыми на 30 эл.град, и подключенными к двум тиристорным преобразователям частоты, каждый из которых состоит из мостового инвертора, выходы которого через дроссели соединены со входами мостового выпрямителя, причем оба выпрямителя имеют общую систему управления, а их силовые выходы объединены попарно и соединены, соответственно, с тремя клеммами для подключения к питающей сети. В указанном устройстве может быть осуществлен режим динамического торможения, причем без обмена энергией (активной или реактивной) между синхронной машиной и сетью.
Однако эффективность такого торможения не велика, т.к. мощность, поступающая от двигателя, рассеивается во внутренних паразитных активных сопротивлениях элементов привода (обмотка машины, обмотка дросселя, соединительные провода и проч.) и, следовательно, угол управления тиристорами инвертора составляет чуть меньше 90 эл.град.
Целью изобретения является повышение эффективности и надежности торможе- ния путем уменьшения времени торможения.
Преимуществом предлагаемого решения является обеспечение эффективного динамического торможения двигателя без использования дополнительных тиристоров или контакторов. При этом для электро- привода возможен также режим рекуперативного торможения или любой комбинированный режим. Одновременно повышается и надежность работы привода (сохраняется возможность эффективного аварийного торможения).
Предлагаемое устройство предполагается использовать для управления частотой вращения мощного синхронного двигателя в судовом электроприводе.
Для доведения изобретения до промышленного освоения необходимо закончить разработку технической документации и изготовить опытный образец. Ориентировочное время, требуемое для этого - 2,5 года.
Поставленная цель достигается тем, что в известном электроприводе переменного трка, содержащем синхронную машину с двумя трехфазными обмотками на статоре, сдвинутыми относительно друг друга на 30 эл.градусов, два преобразователя частоты, каждый из которых составлен из последовательно соединенных между собой трехфазного мостового управляемого выпрямителя, дросселей и инвертора, выводы переменного тока которого подключены к фазным выводам соответствующей обмотки статора, систему управления, выходы которой подключены к управляющим входам трехфазным мостовых выпрямителей, выводы переменного тока которых пофазно объединены и снабжены зажимами для подключения к 5 трехфазной сети, одноименные выводы постоянного тока указанных выпрямителей попарно соединены через дополнительно введенные резисторы динамического торможения.
0На чертеже представлена функциональная схема предлагаемого электропривода.
Устройство содержит синхронную машину 1, обмотки которой подключены ко входам инверторов 2,3 выходы которых че5 рез дроссели 4,5, 6,7 соединены со входами выпрямителей 8, 9, входы которых связаны с клеммами 10, 11, 12, для подключения к питающей сети. Выпрямители 8, 9 имеют общую систему 13 управления. Тормозные
0 резисторы 14, 15 подключены к однополяр- ным выводам выпрямителей 8. 9.
Устройство функционирует следующим образом. В двигательном (основном) режиме тиристорные мосты 2, 3 работают как
5 инверторы с естественной м шинной коммутацией; тиристорные мосты 8, 9 работают как выпрямители, причем общая система 13 управления обеспечивает синхронизацию управляющих импульсов обоих выпрямите0 лей 8, 9. Поэтому можно утверждать, что не только средние, но и мгновенные значения выпрямленных напряжений обоих выпрямителей равны между собой. Следствием этого обстоятельства является равенство
5 потенциалов на концах тормозных резисторов Таким образом, ток через тормозные резисторы не течет, и они не оказывают никакого влияния на работу привода е двигательном режиме.
0
Переход схемы из двигательного в режим динамического торможения происходит так. Система 13 управления вырабатывает сигнал, сдвигающий управля5 ющие импульсы тиристорных мостов 8, 9 вправо (т.е. угол управления должен находиться в диапазоне от 90 эл.град. до 180 эл.град.), при этом токи в звеньях постоянного тока (т.е. токи через дроссели 4, 5, 6, 7)
0 прекращаются и все тиристоры устройства выключаются. После выключения всех тиристоров система 13 управления вырабатывает сигнал, подающий отпирающее напряжение на управляющий электрод од5 ного тиристора катодной группы одного выпрямителя (например, 8) и одного тиристора анодной группы другого выпрямителя (например, 9), причем оба указанных тиристора соединены с одной из трех клемм (например, 12) для подключения к питающей сети
Иными словами, оба этих вентиля принадлежат к одной фазе сети (например, фазе С).
Затем один из инверторов (например, 2) переводится в выпрямительный режим (т.е. угол управления должен находиться в пределах от 90 эл.град. до 0). При этом начинает протекать ток динамического торможения по следующей цепи: тиристорный мост 2, дроссель 5, тормозной резистор 15, открытый тиристор анодной группы моста, 9, клемма 12, открытый тиристор катодной группы моста 8, дроссель 4, тиристорный мост 2. Очевидно что величина протекающего тока и, следовательно, интенсивность торможения может регулироваться путем изменения угла управления тиристорного моста 2, работающего в выпрямительном режиме.
Аналогичная картина получилась бы и в том случае, если бы торможение осуществлялось при помощи перевода в выпрямительный режим инвертора 3. Путь тормозного тока при этом: тиристорный мост 3, дроссель 7, открытый тиристор анодной группы моста 9, клемма 12, открытый тиристор катодной группы моста 3, тормозной резистор 14, дроссель 6, мост 3. Легко видеть, что возможен и одновременный перевод обоих инверторов 2, 3 в режим динамического торможения: в этом случае оба тормозных резистора 14, 15 обтекаются током.
Очевидно, что в описанном режиме динамического торможения отсутствует какой-либо обмен активной или реактивной энергией с питающей сетью.
С другой стороны, если по условиям питающей сети возможна рекуперация энергии, то этот режим также легко осуществляется переводом инверторов 2, 3 в выпрямительный режим, а выпрямителей 8, 9 - в инверторный; система 13 управления обеспечивает при этом синхронизацию импульсов управления выпрямителей 8, 9.
Наконец, возможно комбинированное торможение привода, когда часть активной энергии возвращается обратно в сеть, а часть расходуется в резисторах 14, 15. Для этого достаточно снять импульсы управления в одном выпрямителе (например, 8) и в одном инверторе (например, 3). Оставшиеся тиристорные мосты переводятся: мост 2 - в выпрямительный режим, мост 9 - в инверторный. Путь тормозного тока: мост 2, дроссель 5, резистор 15, мост 9, резистор 14, дроссель 4, мост 2.
Кроме того, предлагаемое устройство, по сравнению с известными, обладает повышенной надежностью. Последнее вытекает из наличия перекрестных связей между обоими каналами преобразовательной части электропривода за счет резисторов 14, 15. Иными словами, в предлагаемом устройстве. в отличие от прототипа, сохраняется возможность торможения привода при отказе некоторых элементов схемы. Так, при выходе из строя тиристорных мостов 3, 8 (например, при исчезновении отпирающих
0 импульсов на всех тиристорах указанных мостов из-за неисправности систем управления или при пропадании питания собственных ыужд) динамическое торможение остается. Для этого следует тиристорный
5 мост 2 перевести в выпрямительный режим и подать отпирающие импульсы на любые два тиристора моста 9, связанные с одной и той же фазой сети (например, с фазой С); путь тормозного тока при этом: тиристор0 ный мост 2, дроссель 5, резистор 15, открытые тиристоры (принадлежащие фазе С) моста 9. резистор 19, дроссель 4, мост 2. Очевидно, что аналогичная картина получилась бы при выходе из строя мостов 2 и 9 при
5 исправных 3 и 8.
Другой пример. Допустим, что в предлагаемом устройстве вышли из строя (потеряли управление) тиристоры анодной группы моста 8 и тиристоры катодной группы моста
0 9. В этом случае режим динамического торможения (в отличие от предыдущего примера) сохраняется полностью. Тормозной ток обоих мостов 2, 3 проходит при этом через тиристор анодной группы моста 9 и тири5 стор катодной группы моста 8 (оба тиристора, естественно, должны принадлежать к одной фазе сети, например, С).
Следует подчеркнуть, что в данном случае можно осуществить и комбинированное
0 торможение привода, когда часть энергии возвращается обратно в сеть, а часть расходуется в резисторах 14, 15. Действительно, оставшиеся в работе анодная группа моста 9 и катодная моста 8 образуют опять-таки
5 трехфазный мост Ларионова. Этот новый мост должен быть переведен в режим инвертора; мосты 2 и 3 при этом работают как выпрямители. Тормозной ток первого канала: мост 2, дроссель 5, резистор 15, анодная
0 группа моста 9, питающая сеть, катодная группа моста 8, дроссель 4, мост 2; ток второго канала: мост 3, дроссель 7, анодная группа моста 9, сеть, катодная группа моста 8, резистор 14, дроссель 6, мост 3. Можно
5 показать, что если бы повреждения (потеря управления) получили катодная группа моста 8 и анодная моста 9, картина оказалась бы аналогичной.
С другой стороны, из приведенного примера видно, что в предложенном устройстве
91781807 10
режим чистого динамического торможе-дросселей и инвертора, выводы переменно
ния сохраняется полностью, если в мостах 8го тока которого подключены к фазным вы
и 9 останется только по одному исправномуводам соответствующей обмотки статора
(управляемому) тиристору (один в катодной,систему управления, выходы которой под
другой в анодной группе), которые принад-5 ключены к управляющим входам трехфаз
лежат к одной фазе сети.ных мостовых выпрямителей, выводь
переменного тока которых пофазно обьеди
Формула изобретениянены и снабжены зажимами для под ключе Электропривод переменного тока, со-ния к трехфазной сети, отличающий- держащий синхронную машину с двумя10 с я тем, что, с целью повышения надежно- трехфазными обмотками на статоре, сдви-сти и эффективности торможения путем нутыми одна относительно другой на 30уменьшения времени торможения, одно- эл.градусов, два преобразователя частоты,именные выводы постоянного тока указан- каждый из которых составлен из последова-ных выпрямителей попарно соединены тельно соединенных между собой трехфаз-15 через дополнительно введенные резисторы ного мостового управляемого выпрямителя,динамического торможения.


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1980 |
|
SU983950A1 |
| Электропривод | 1980 |
|
SU930544A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1984 |
|
SU1279036A1 |
| Электропривод переменного тока | 1986 |
|
SU1431025A1 |
| АВТОНОМНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2093378C1 |
| ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1995 |
|
RU2094938C1 |
| Асинхронный вентильный каскад | 1983 |
|
SU1108599A1 |
| Асинхронно-вентильный каскад | 1989 |
|
SU1757076A1 |
| Полупроводниковый преобразователь | 1982 |
|
SU1145410A1 |
| УСТРОЙСТВО ДЛЯ ЧАСТОТНОГО ПУСКА И РЕГУЛИРОВАНИЯ СКОРОСТИ ВЫСОКОВОЛЬТНОГО СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2497268C1 |
Использование: в электроприводах для осуществления динамического торможения. Сущность : в электропривод переменного тока введены резисторы 14, 15 динамического торможения. Каждый резистор включен между разноименными выводами управляемы вьшрямителей 8. 9 соответственно. Выпрямитель 8 через дроссели 4. 5 и инвертор 7 питает одну обмотку синхронной машины 1, а выпрямитель 9 через дроссели 6, 7 и инвертор 3 другую ее обмотку. В процессе динамического торможения оба резистора 14, 15 обтекаются током Выход из строя тиристоров упомянутых выпрямителей и инверторов сохраняет режим динамического торможения. 1 ил. Л , Ё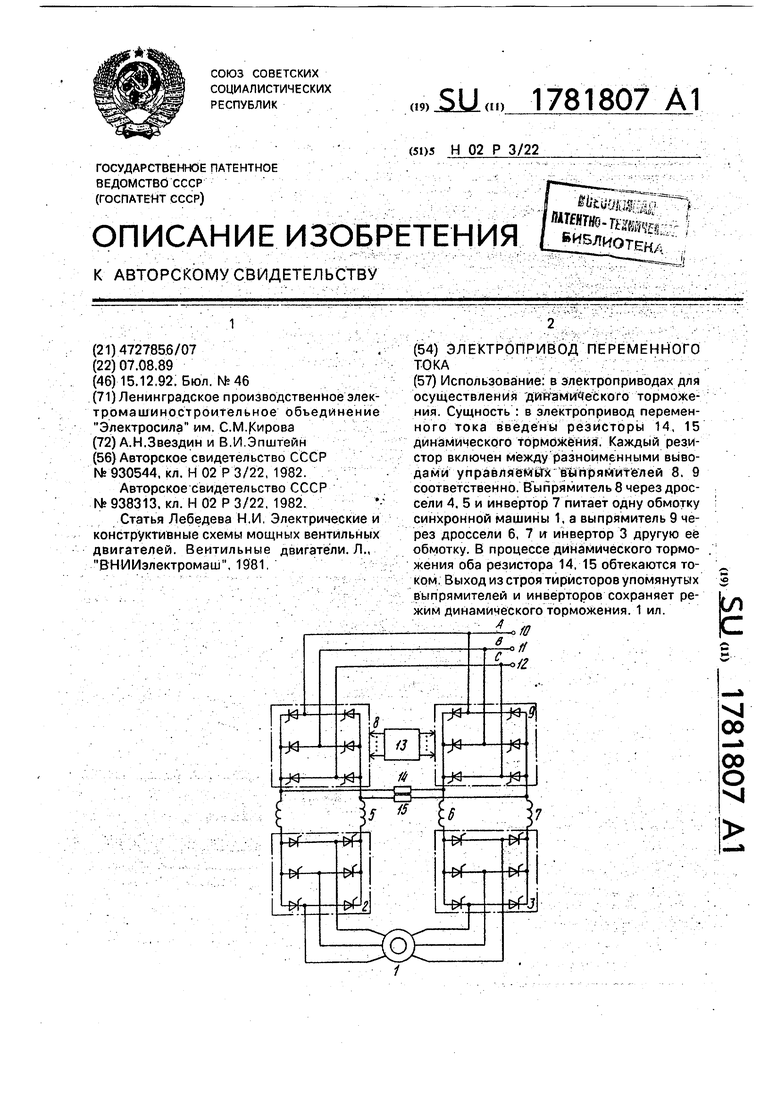
| Электропривод | 1980 |
|
SU930544A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочий слой носителя магнитной записи | 1980 |
|
SU938313A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Статья Лебедева Н.И Электрические и конструктивные схемы мощных вентильных двигателей | |||
| Вентильные двигатели | |||
| Л., ВНИИэлектромаш, 1981 | |||
