(54) РЕВЕРСИВНЫЙ ПОДПЯТНИК СКОЛБЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2000 |
|
RU2184289C2 |
| ПОДШИПНИК КАЧЕНИЯ УПОРНЫЙ ДВОЙНОЙ С КОНИЧЕСКИМИ РОЛИКАМИ БЕССЕПАРАТОРНЫЙ | 2007 |
|
RU2384764C2 |
| Реверсивный подпятник В.Ф.Чижова | 1988 |
|
SU1594299A1 |
| ПОДПЯТНИК ГИДРОГЕНЕРАТОРА | 2001 |
|
RU2221931C1 |
| Реверсивный подпятник,преимущественно для гидрогенераторов | 1980 |
|
SU1038645A1 |
| БУРОВОЕ ШАРОШЕЧНОЕ ДОЛОТО | 2005 |
|
RU2298632C1 |
| Универсальный шарнир | 1975 |
|
SU551454A1 |
| ВИНТОВАЯ ПАРА С ТРЕНИЕМ КАЧЕНИЯ | 1998 |
|
RU2148746C1 |
| ПОДШИПНИК КАЧЕНИЯ УПОРНЫЙ С КОНИЧЕСКИМИ РОЛИКАМИ БЕССЕПАРАТОРНЫЙ | 2007 |
|
RU2349803C2 |
| УПОРНЫЙ ПОДШИПНИК СКОЛЬЖЕНИЯ | 2000 |
|
RU2162171C1 |
1
Изобретение относится к машиностроению и может быть использовано в опорах реверсивных гидроагрегатов.
Известе.н реверсивный подпятник скольжения, содержащий корпус с тангенциальными упорами, самоустанавливающиеся сегменты, которые относительно тангенциальных упоров корпуса установлены с симметричными зазорами на опорных элементах, попарно расположенных в канавках корпуса и сегментов по окружности вокруг оси подпятника. Между собой опорные элементы разделены дистанционным элементом 1 .
Известный реверсивный подпятник скольжения сложен конструктивно, неэкономичен и ненадежен в эксплуатации вследствие того, что установка сегментов под нагрузкой в их рабочее положение осуществляется с помощью сложной системы, включающей в себя трубопроводы высокого давления,. фильтры обратные клапаны и прочие устройства. Грузоподъемность известного подпятника мала.
Цель изобретения - повышение надежности и грузоподъемности подпятника.
Указанная цель достигается тем, что в реверсивном подпятнике скольжения, содержащем корпус с тангенциальными упорами, самоустанавливающиеся сегменты, смонтированные с симметричными относительно тангенциальных упоров зазорами, и опорные элементы, которые попарно расположены по окружности в канавках корпуса и каждого из сегментов и разделены между собой в паре дистанционным элементом, опорные элементы выполнены в виде тел качения. Тела качения установлены с зазором между собой по обе стороны и на одинаковом расстоянии от оси симметрии сегмента в канавках, а последние выполнены по окружности и по крайней мере, на поверхности одного из контактирующих с телами качения элементов с двумя наклонными винтовыми участка:ми. Дистанционный элемент, который разделяет тела качения, выполнен в виде сепаратора.
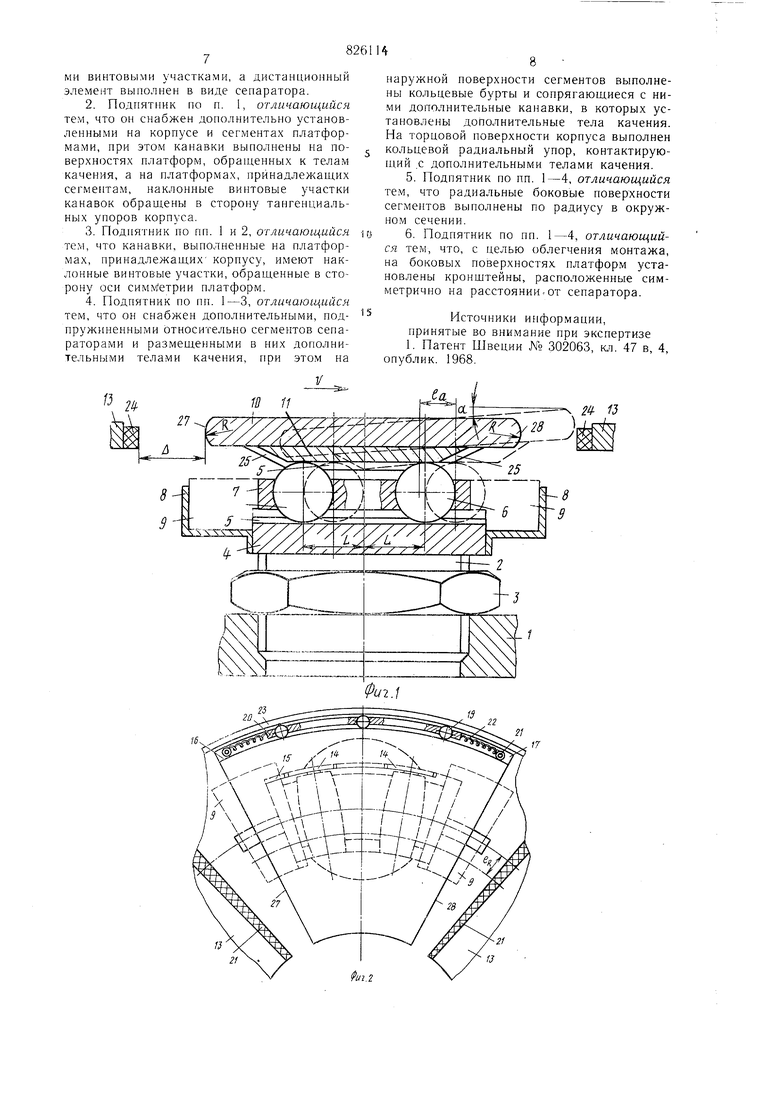
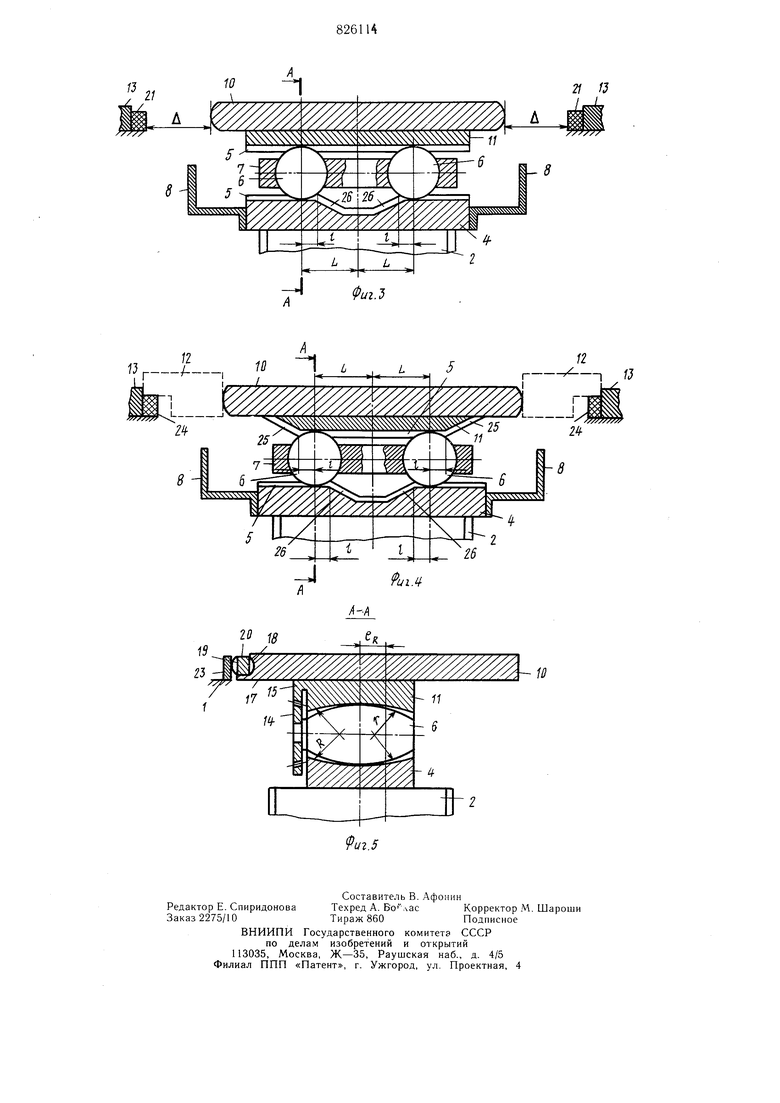
Кроме того, подпятник снабжен дополнительно платформами, которые устанавливаются на корпусе и сегментах. При этом канавки выполняются на тех поверхностях платформ, которые обращены к телам качения. Наклонные винтовые участки канавок выполненных на платформах, принадлежащих сегментам, обращены в сторону тангенциальных упоров корпуса. В случае выполнения канавок с наклонными винтовыми участками на платформах, принадлежащих корпусу, наклонные винтовые участки канавок обращены в направлении оси симметрии платформ. Подпятник снабжен дополнительными, подпружиненными относительно сегментов сепараторами и размещенными в них дополнительными телами качения. На наружной боковой поверхности сегментов выполнены кольцевые бурты и сопрягающиеся с ними дополнительные канавки, в которых установлены дополнительные тела качения. На торцовой поверхности корпуса выполнен кольцевой радиальный упор, контактирующий с дополнительными телами качения. Радиальные боковые поверхности сегментов выполнены по радиусу в окружном сечении, на боковых поверхностях платформ установлены кронщтейны, расположенные симметрично на расстоянии от сепаратора. На фиг. 1 изображен реверсивный подпятник скольжения в окружном сечении; на фиг. 2 - то же, вид сверху; на фиг. 3 и 4 - варианты выполнения реверсивного подпятника скольжения; на фиг. 5 - разрез А-А на фиг. 3 и 4. Подпятник содержит корпус 1, в котором на щпонке или щлицах установлен опорный болт 2. Высота установки болта 2 регулируется с помощью гайки 3. На верхнем торце болта 2 закреплена платформа 4 сегментной формы, в средней ее части по окружности выполнена канавка (беговая дорожка) 5 радиусного профиля. В канавке размещены два опорных элемента 6 в виде тел качения - роликов бочкообразной формы. Зазор между телами качения выдерживается с помощью сепаратора 7. Для фиксации тел качения в период монтажа к платформе 4 прикреплены два симметрично расположенных кронщтейна 8, в которые устанавливаются ограничительные щаблоны 9. Ось симметрии платформы 4 совпадает с осью болта 2. При монтаже подпятника тела 6 качения располагаются симметрично относительно оси симметрии платформы. На телах 6 качения установлены сегменты 10, снабженные дополнительно платформами 11 также сегментной формы. В средней части платформы в окружном направлении выполнена канавка (беговая дорожка) 5 радиусного профиля. Радиус кривизны R профиля канавок 5 платформ 4 и 11 должен быть больше радиуса кривизны г тел качения 6. Радиальная ось симметрии платформы 11 совпадает с осью сегмента, а ось последнего совпадает с осью симметрии опорного болта. Ориентацию сегментов 10 осуществляют с помощью щаблонов 12, устанавливаемых между боковыми кромками сегментов и тангенциальными упорами 13 корпуса. Для исключения проскальзывания тел б качения по канавкам 5, к телам качения прикреплены конические зубчатые колеса 14, имеющие зацепление с зубчатой рейкой 15 дугообразной формы. Зубчатая рейка 15 выполнена заодно с платформой 11. Для передачи радиальных усилий от сегмента 10 к корпусу I подщипника на наружной боковой поверхности 16 сегментов выполнен кольцевой бурт 17 и сопрягающаяся с ним дополнительная канавка 18, в которой установлены дополнительные тела 19 качения с помощью дополнительного сепаратора 20. Этот сепаратор подпружинен с помощью болтов 21 и пружин 22 относительно сегментов 10. Перемещение сегментов 10 в радиальном направлении ограничивается радиальным упором 23, смонтированного на торцовой поверхности корпуса 1. С целью смягчения ударов сегментов 10 о тангенциальные упоры 13, возникающие в период пуска, упоры снабжены амортизаторами 24, выполненными из спрессованных проволочных спиралей. Канавки 5 на платформах 11, установленных на сегментах 10, имеют два наклонных участка 25 плавно изменяющейся криволинейной формы (например, винтовые). Эти наклонные участки обращены в сторону тангенциальных упоров корпуса. В случае выполнения на платформах 4, установлен „„„.. ных на корпусе, канавок 5 с наклонными участкамГ2бпослёднйГобращень1Тсторо „у симметрии платформ 4. g случае необходимости, вызванной требованием уменьщить окружное смещение сегментов, наклонные винтовые участки 25 „ 26 канавок 5 выполняются одновременно как на платформах 4, так и на платформах ц. Расстояние а каждого из тел качения 6 относительно оси симметрии платформы несколько больще величины требуемого эксцентриситета сегментов в окружном направлении и равно сумме эксцентриситета It и величины Д окружного смещения сегмента 10 относительно нейтрального положения (исходного положения оси симметрии сегмента 10). Величина Д смещения сегмента 10 равна сумме величины 1 перекрытия точки опоры тела 6 качения горизонтальным участком беговой дорожки 5 при нейтральном положении сегмента 10 и длины наклонного участ:: ка ш беговой дорожки 5. Наклонный участок обеспечивает перепад высоты точки опоры сегмента при смещении его относительно тела 6 качения (показано пунктиром). Радиальные боковые поверхности 27 и 28 сегментов 10 в окружном сечении выполнены по радиусу. Подпятник работает следующим образом. В момент пуска в связи с тем, что трение скольжения между диском пяты (не
показан) и сегментом 10 больше, чем трение качения между телами б качения и платформами 4 и 11, сегмент начинает двигаться вместе с пятой как часть подвижного кольца упорного подпятника качения. Тела 6 качения, двигаясь в канавке 5, смещаются в окружном направлении относительно оси упорного болта 2. Верхняя платформа 11, соединенная с сегментом 10, смещается относительно сепаратора 7. В некоторый момент, например, при движении по часовой стрелке, левое (заднее) тело 6 качения располагается в зоне наклонного винтового участка 25 или за ним. В этом случае платформа 11 выйдет из контакта с левым телом 6 качения. Вся нагрузка, действующая на сегмент 10, будет передаваься на платформу 4 через правое тело 6 качения. В момент касания сегментом 10 амортизатора 24, установленного на упоре, ось правого тела качения находится на некотором расстоянии от радиальной оси симметрии сегмента 10. Это расстояние равно требуемому эксцентриситету 1г.
Радиальный эксцентриситет IR образуется за счет ориентации платформы 11 относительно сегмента 10 при их сборке (соединении). После касания амортизатора 24 кромкой 28 сегмента 10 последний останавливается. Энергия удара поглощается амортизатором.
В дальнейшем подпятник работает аналогично подпятнику с самоустанавливающимися сегментами.
Под действием масляного клина пята всплывает, а сегмент 10 отклоняется относительно нее на некоторый угол а, опираясь на правое тело 6 качения, как на обычную сферическую опору. Выполнение радиальных боковых поверхностей 27 и 28 сегментов по радиусу, а амортизаторов 24 - из спрессованных проволочных спиралей приводит к тому, что указанная пара работает как самосмазывающийся подшипник скольжения. Это облегчает условия самоустановки сегмента 10. При движении сегмента 10 и сепаратора 7 зубчатые конические колеса 14, находясь в зацеплении с дугообразной зубчатой рейкой 15, обкатываются по ней без проскальзывания тел 6 качения относительно платформы 11, а следовательно, и нарушения эксцентриситета It.
При окружном перемещении сегмент 10 опирается своей боковой наружной поверхностью 16 на дополнительные тела 10 качения, находящиеся в дополнительном сепараторе 20. Дополнительные тела 19 качения обкатываются по кольцевому радиусному упору 23, как по наружному кольцу подшипника качения. Пружины 22, зафиксированные на сегменте с помощью болтов 21, удерживают тела 19 качения с сепаратором 20 в зоне бурта 17 сегмента 10, чем исключается скатывание тел качения с бурта сегмента 10 в окружном и вертикальном направлениях.
После остановки пяты сегмент принимает горизонтальное положение. При изменении направления вращения пяты на обратное, то есть при движении ее против часовой стрелки, сегмент 10 движется вместе с пятой до касания радиальной боковой поверхностью 27 амортизатора 24. Вся нагрузка при этом воспринимается левым телом 6 качения, а правое тело 6 качения имеет зазор относительно платформы 4.
В дальнейщем подпятник работает так же, как при движении пяты по часовой стрелке.
Тот же эффект самоустановки сегментов 10 с требуемым эксцентриситетом при реверсивном движении подпятника получают при выполнении наклонных участков 26 -беговой дорожки 5 на платформе 4.
Учитывая то обстоятельство, что при выполнении подпятника с наклонными участками, на обеих платформах 4 и 11 величина окружного смещения Д сегмента 10 от нейтрального положения доводится до величины порядка 2-5 мм, предлагаемая конструкция подпятника позволяет осуществлять в реверсивных мащинах самоустановку сегментов с любым оптимальным эксцентриситетом.
Кроме того, при использовании предлагаемой конструкции в случае несимметричного расположения наклонных винтовых участков 25 и 26 относительно оси болта 2 осуществляется установка сегментов с разллчной величиной эксцентриситета при прямом и обратном движении пяты.
Перечисленные свойства реверсивного подпятника скольжения обеспечивают, по сравнению с известными конструкциями, большую надежность, грузоподъемность, износоустойчивость, а также лучшие пусковые характеристики за счет самоустановки сегментов с оптимальным эксцентриситетом при любом направлении вращения пяты.
Формула изобретения
I. Реверсивный подпятник скольжения, содержащий корпус с тангенциальными упорами, самоустанавливающиеся сегменты, смонтированные с симметричными относительно тангенциальных упоров зазорами, и расположенные по окружности опорные элементы, размещенные попарно в канавках корпуса и каждого из сегментов и разделенные между собой в паре дистанционным элементом, отличающийся тем, что, с целью повыщения надежности и грузоподъемности, опорные элементы выполнены в виде тел качения, которые установлены с зазором между собой по обе стороны и на одинаковом расстоянии от оси симметрии сегмента в канавках, которые выполнены по окружности и, по крайней мере, на поверхности одного из контактирующих с телами качения элементов с двумя наклонными винтовыми участками, а дистанционный элемент выполнен в виде сепаратора. 2.Подпятник по п. 1, отличающийся тем, что он снабжен дополнительно установленными на корпусе и сегментах платформами, при этом канавки выполнены на поверхностях платформ, обращенных к телам качения, а на платформах, принадлежащих сегментам, наклонные винтовые участки канавок обращены в сторону тангенциальных упоров корпуса. 3.Подпятник по пп. 1 и 2, отличающийся тем, что канавки, выполненные на платформах, принадлежащих корпусу, имеют наклонные винтовые участки, обращенные в сторону оси симметрии платформ. 4.Подпятник по пп. 1-3, отличающийся тем, что он снабжен дополнительными, подпружиненными относительно сегментов сепараторами и размещенными в них дополнительными телами качения, при этом на ,S J--7 Sнаружной поверхности сегментов выполнены кольцевые бурты и сопрягающиеся с ними дополнительные канавки, в которых установлены дополнительные тела качения. На торцовой поверхности корпуса выполнен кольцевой радиальный упор, контактирующий .с дополнительными телами качения. 5.Подпятник по пп. 1-4, отличающийся тем, что радиальные боковые поверхности сегментов выполнены по радиусу в окружном сечении. 6.Подпятник по пп. 1-4, отличающийся тем, что, с целью облегчения монтажа, на боковых поверхностях платформ установлены кронщтейны, расположенные симметрично на расстоянии.от сепаратора. Источники информации, принятые во внимание при экспертизе 1. Патент Швеции № 302063, кл. 47 в, 4, опублик. 1968.
