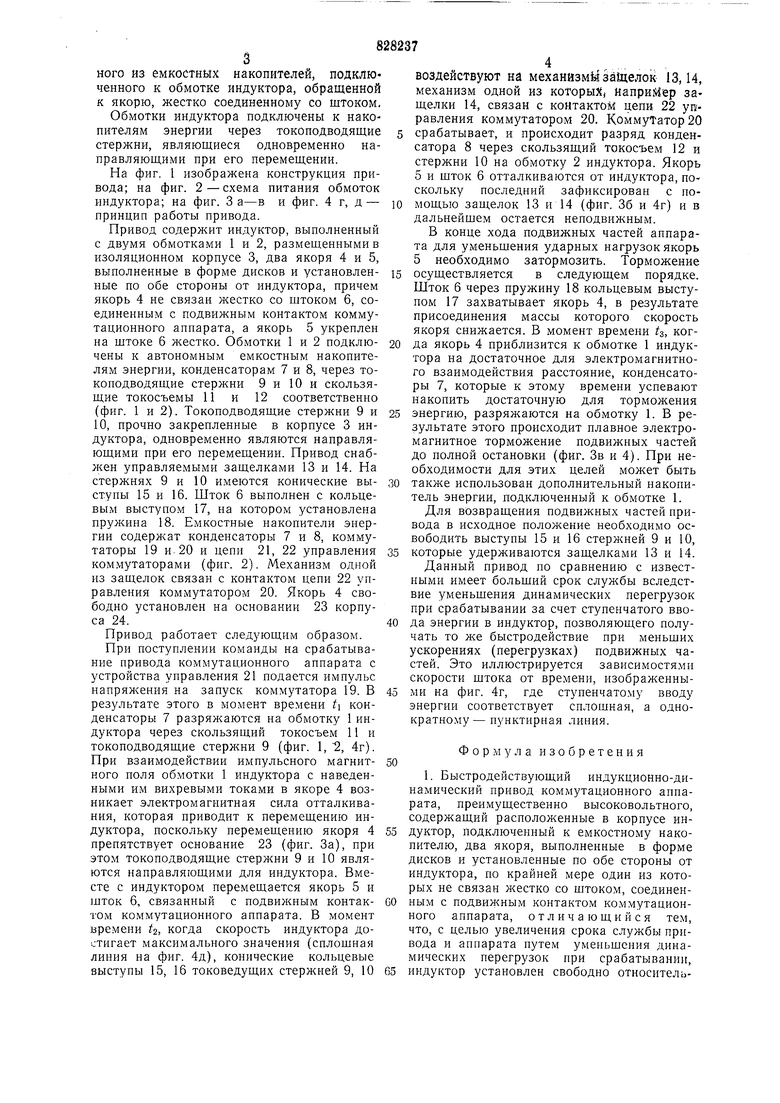
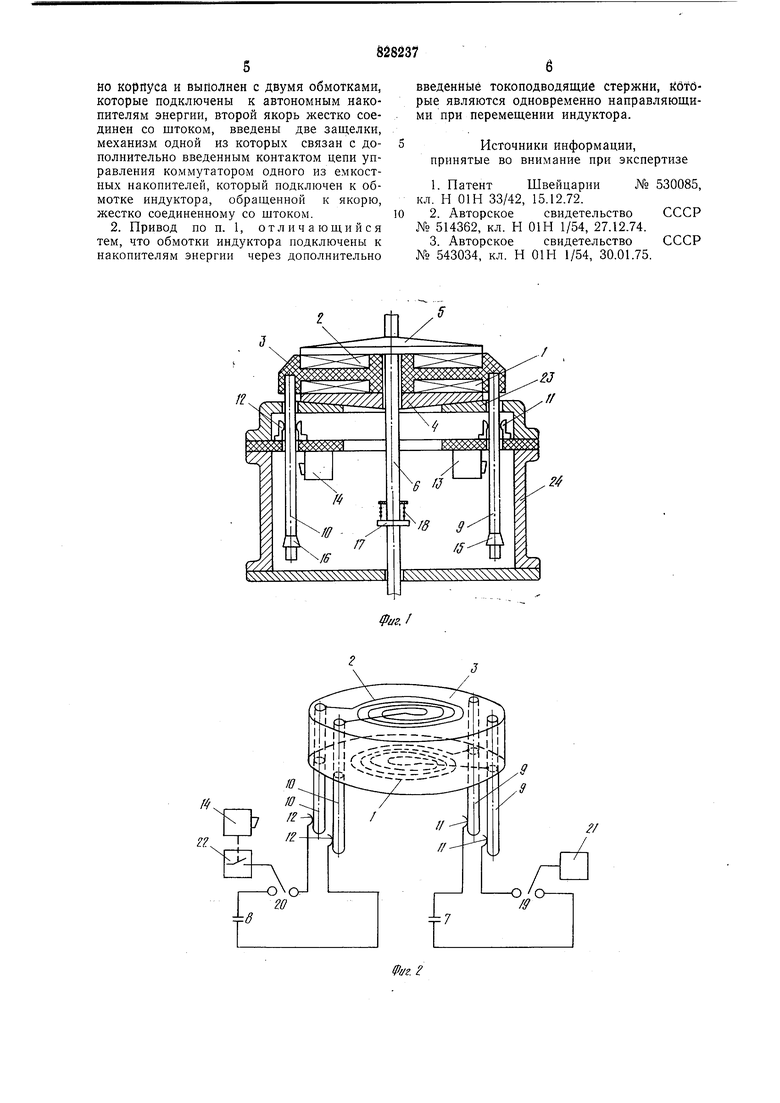
Horo из емкостных накопителей, подключенного к обмотке индуктора, обращенной к якорю, жестко соединенному со штоком. Обмотки индуктора подключены к накопителям энергии через токоподводящие стержни, являющиеся одновременно направляющими при его перемещении. На фиг. 1 изображена конструкция привода; на фиг. 2-схема иитания обмоток индуктора; на фиг. За-в и фиг. 4 г, д- принцип работы привода. Привод содержит индуктор, выполненный с двумя обмотками 1 и 2, размещенными в изоляционном корпусе 3, два якоря 4 и 5, выполненные в форме дисков и установленные по обе стороны от индуктора, причем якорь 4 не связан жестко со штоком 6, соединенным с подвижным контактом коммутационного аппарата, а якорь 5 укреплен на штоке 6 жестко. Обмотки 1 и 2 подключены к автономным емкостным накопителям энергии, конденсаторам 7 и 8, через токоподводящие стержни 9 и 10 и скользящие токосъемы 11 и 12 соответственно (фиг. 1 и 2). Токоподводящие стержни 9 и 10, прочно закрепленные в корпусе 3 индуктора, одновременно являются направляющими при его перемещении. Привод снаб}кен управляемыми защелками 13 и 14. На стержнях 9 и 10 имеются конические выступы 15 и 16. Шток 6 выполнен с кольцевым выступом 17, на котором установлена пружина 18. Емкостные накопители энергии содержат конденсаторы 7 и 8, коммутаторы 19 и.20 и цепи 21, 22 управления коммутаторами (фиг. 2). Механизм одной из защелок связан с контактом цепи 22 управления коммутатором 20. Якорь 4 свободно установлен на основании 23 корпуса 24. Привод работает следующим образом. При поступлении команды на срабатывание привода коммутационного аппарата с устройства управления 21 подается импульс напряжения на запуск коммутатора 19. В результате этого в момент времени ti конденсаторы 7 разряжаются на обмотку 1 индуктора через скользящий токосъем 11 и Токоподводящие стержни 9 (фиг. 1, 2, 4г). При взаимодействии импульсного магнитного поля обмотки 1 индуктора с наведенными им вихревыми токами в якоре 4 возникает электромагнитная сила отталкивания, которая приводит к перемещению индуктора, поскольку перемещению якоря 4 препятствует основание 23 (фиг. За), при этом Токоподводящие стерл ни 9 и 10 являются направляющими для индуктора. Вместе с индуктором перемещается якорь 5 и 1ЛТОК 6, связанный с подвижным контактом коммутационного аппарата. В момент времени tz, когда скорость индуктора достигает максимального значения (сплошная линия на фиг. 4д), конические кольцевые выступы 15, 16 токоведущих стержней 9, 10 воздействуют на механизм заЕцелок 13,14, механизм одной из которыХ; Например защелки 14, связан с контактом цепи 22 управления коммутатором 20. Коммутатор 20 срабатывает, и происходит разряд конденсатора 8 через скользящий токосъем 12 и стержни 10 на обмотку 2 индуктора. Якорь 5 и шток 6 отталкиваются от индуктора, поскольку последний зафиксирован с помощью защелок 13 и 14 (фиг. 36 и 4г) и в дальнейшем остается неподвижным. В конце хода подвижных частей аппарата для уменьшения ударных нагрузок якорь 5 необходимо затормозить. Торможение осуществляется в следующем порядке. Шток 6 через пружину 18 кольцевым выступом 17 захватывает якорь 4, в результате присоединения массы которого скорость якоря снижается. В момент времени з, когда якорь 4 приблизится к обмотке 1 индуктора на достаточное для электромагнитного взаимодействия расстояние, конденсаторы 7, которые к этому времени успевают накопить достаточную для торможения энергию, разряжаются на обмотку 1. В результате этого происходит плавное электромагнитное торможение подвижных частей до полной остановки (фиг. Зв и 4). При необходимости для этих целей может быть также использован дополнительный накопитель энергии, подключенный к обмотке 1. Для возвращения подвижных частей привода в исходное положение необходимо освободить выступы 15 и 16 стержней 9 и 10, которые удерживаются защелками 13 и 14. Данный привод по сравнению с известными имеет больший срок службы вследствие уменьшения динамических перегрузок при срабатывании за счет ступенчатого ввода энергии в индуктор, позволяющего получать то же быстродействие при меньших ускорениях (перегрузках) подвижных частей. Это иллюстрируется зависимостями скорости штока от времени, изображенными на фиг. 4г, где ступенчатому вводу энергии соответствует сплошная, а однократному- пунктирная линия. Формула изобретения 1. Быстродействующий индукционно-динамический привод коммутационного аппарата, преимущественно высоковольтного, содержащий расположенные в корпусе индуктор, подключенный к емкостному накопителю, два якоря, выполиеиные в форме дисков и установленные по обе стороны от индуктора, по крайней мере один из которых не связан жестко со штоком, соединенным с подвижным контактом ко.ммутационного аппарата, отличающийся тем, что, с целью увеличения срока службы привода и аппарата путем уменьшения динамических перегрузок при срабатывании, индуктор установлен свободно относительно корпуса и выполнен с двумя обмотками, которые подключены к автономным накопителям энергии, второй якорь жестко соединен со штоком, введены две защелки, механизм одной из которых связан с дополнительно введенным контактом цепи управления коммутатором одного из емкостных накопителей, который подключен к обмотке индуктора, обращенной к якорю, жестко соединенному со штоком. 2. Привод по п. 1, отличающийся тем, что обмотки индуктора подключены к накопителям энергип через дополнптельно введенные токоподводящие стержни, КбтОрые являются одновременно направляющими при перемещении индуктора. Источники информации, принятые во внимание при экспертизе 1.Патент Швейцарии № 530085 кл. Н 01Н 33/42, 15.12.72. 2.Авторское свидетельство СССР № 514362, кл. Н 01Н 1/54, 27.12.74. 3.Авторское свидетельство СССР № 543034, кл. Н 01Н 1/54, 30.01.75.
| название | год | авторы | номер документа |
|---|---|---|---|
| Быстродействующий индукционнодинамический привод | 1977 |
|
SU686092A1 |
| Привод быстродействующего коммутационного аппарата | 1978 |
|
SU769654A2 |
| Быстродействующий индукционно-динамический привод коммутационного аппарата | 1977 |
|
SU675461A1 |
| Быстродействующая управляемаязАщЕлКА | 1979 |
|
SU817769A1 |
| Быстродействующий коммутационный аппарат | 1977 |
|
SU653643A1 |
| Быстродействующий индукционно- динамический привод коммутационного аппарата | 1977 |
|
SU721860A1 |
| Автодутьевой газовый выключатель | 1979 |
|
SU813524A1 |
| Быстродействующий автодутьевой выключатель | 1978 |
|
SU748545A1 |
| Привод быстродействующего коммутационного аппарата | 1975 |
|
SU535611A1 |
| Быстродействующий индукционно- динамический привод коммутационного аппарата | 1978 |
|
SU750609A1 |

г
П
ЖУ
,|)
// ////4.
/./ п///////////
-2J
у/
If
