1
Изобретение относится к автоматике и вычислительной технике и может быть использовано для связи аналоговых источников информации с цифровым вычислительным устройством.
Известны преобразователи угла поворота вала в код, содержащие фазовращатель, подключенный к преобразователю мгновенных значений сдвига фаз выходных сигналов фазовращателя в код 1.
Недостатком таких преобразователей является большая средне-квадратическая ошибка, вызванная нестабильностью мгновенных значений фазовых сдвигов.
Известны так же преобразо,ватели содержащ.ие фазовращатель, подключенный к преобразователю сдвига фазы в код интегрирующего типа, измеряющего среднее значение сдвига фаз за один оборот модулятора фазовращателя 2.
Недостатком данных преобразователей является их низкое быстродействие.
Наиболее близким техническим решением к предлагаемому изобретению является преобразователь угла поворота вала в код, содержащий генератор импульсов, подключенный к входам опорного и информационного реверсивных счетчиков и через делитель частоты к фазовращателю, выходы которого и выходы реверсивных счетчиков подключены к входам соответствующих фазовых дискриминаторов, выход каждого из которых через первый и второй блоки преобразования напряжения в частоту подключены к управляющим входам соответствующих реверсивных счетчиков 3.
Недостатком такого.преобразователя является большая динамическая погрешность.
Цель изобретения - уменьшение динамической погрешности преобразователя.
Поставленная цель достигается тем, что в преобразователь угла поворота вала в код. содержащий генератор импульсов, подключенный к опорному и информационному входам реверсивных счетчиков и через eлитель частоты к фазовращателю, выходы которого и выходы реверсивных счетчиков подключены к входам соответствующих фазовых дискриминаторов, выход каждого из которых через первый и второй блоки преобразования напряжения в частоту подключены к управляющим входам соответствующих реверсивных счетчиков, введены третий реверсивный счетчик, третий фазовый
дискриминатор, третий блок преобразования напряжения в частоту и два элемента ИЛИ, входы которых подключены к соответствующим выходам второго и третьего блоков преобразования напряжения в частоту, а выходы подключены к управляющим входам третьего реверсивного счетчика, вход которого соединен с выходом генератора импульсов, выход третьего реверсивного счетчика и информационный выход фазовращателя подключены к третьему фазовому дискриминатору, выход которого подключен к третьему блоку нреобразования напряжения в частоту.
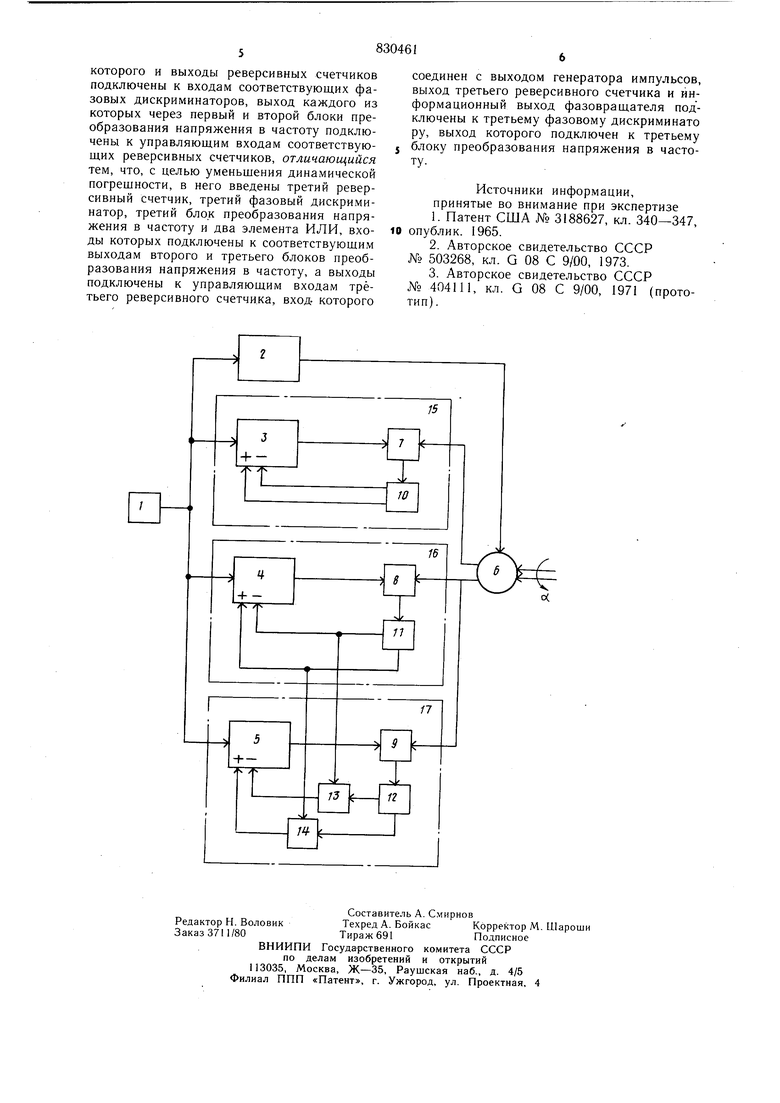
На чертеже представлена блок-схема преобразователя.
Преобразователь содержит генератор 1 импульсов, выход которого соединен с входом делителя 2 частоты и входами опорного 3, информационного 4 и третьего 5 реверсивных счетчиков.
Выход делителя 2 частоты подключен ко входу фазовращателя 6, а выходы реверсивных счетчиков 3-5 подключены к первым входам фазовых дискриминаторов 7 и 8 и третьего фазового дискриминатора 9 соответственно. Второй вход фазового дискриминатора 7 соединен с опорным, а вторые входы фазовых дискриминаторов 8 и 9 - с информационным выходом фазовращателя 6. Выходы фазовых дискриминаторов 7-9 подключены к первому 10, второму 11 и третьему 12 блокам преобразования напряжения в частоту соответственно. Выходы блоков 10 и 11 соответственно подключены к управляющим входам реверсивных счетчиков 3 и 4 непосредственно, а выходы блока 12 связаны с управляющими входами реверсивного счетчика 5 через элементы ИЛИ 13 и 14, к другим входам которых подключены выходы блока II. Реверсивный счетчик 3, фазовый дискриминатор 7 и преобразователь напряжения в частоту 10 образуют опорную систему фазовой автоподстройки (ФАП) 15, соответствующие элементы 4, 8 и 11 - информационную систему ФАП 16, а элементы 5, 9 и 12, 13 и 14 - корректирующую систему ФАП 17.
Преобразователь работает следующим образом.
В исходном положении все системы ФАП находятся в согласованном положении и на выходах блоков 10-12 импульсы отсутствуют. Разность фаз выходных сигналов реверсивных счетчиков 3 и 4, 3 и 5 (фазы выходных сигналов реверсивных счетчиков 4 и 5 равны) равна разности фаз выходных сигналов фазовращателя и соответствует угловому положению входного вала, т. е. угловому положению входного вала соответствует код, равный разности кодов реверсивных счетчиков 3 и 4, 3 и 5. При повороте входного вала на некоторый угол oi фаза информационного сигнала фазовращателя 6 изменяется на угол р Кс(,где К - коэффициент электрической редукции фазовращателя, системы ФАП 16 и 17 оказываются рассогласованными, на выходах соответствующих фазовых дискриминаторов 8 и 9 появляются напряжения рассогласования.
Под действием этих напряжений блоки 11 и 12 вырабатывают импульсы с частотами, пропорциональными рассогласованию систем ФАП 16 и 17, которые сум.мируются с учетом знака рассогласования с импульсами генератора 1 на входах реверсивных счетчиков 4 и 5. На вход счетчика 5 поступают импульсы с частотой, равной сумме частот выходных импульсов блоков II и 12. В результате происходит отработка фазового рассогласования систе.м ФАП 16 и 17 до тех
пор, пока на выходах фазовых дискриминаторов 8 и 9 напряжение станет равным нулю. При этом разность кодов счетчиков 3 и 4, 3 и 5 изменится на величину, соответствующую углу поворота оС входного вала. При вращении входного вала с постоянной скоростью 52, система ФАП 16 будет отслеживать из.менение фазы информационного сигнала фазовращателя 6 с динамической ошибкой Afliig, такой же как у преобразователя-прототипа:,,
д
гдеQ( - добротность по скорости системы
ФАП 16.
Импульсы отработки системы ФАП 16 через элементы ИЛИ 13 и 14 подаются на управляющие входы реверсивного счетчика 5 и обеспечивают отслеживание выходным сигналом реверсивного счетчика 5 изменения фазы информационного сигнала фазовращателя 6 с точностью динамической ошибки AaLiQ,Ошибка системы ФАП 16, которая, по существу, является входным воздействием системы ФАП 17, при постоянной скорости 51 входного вала постоянна и отрабатывается системой ФАП 17 до нуля. Кодирование углового положения вращающегося с постоянной скоростью вала произво0 дится без динамической ошибки.
При постоянном ускорении входного вала динамическая ошибка предлагаемого преобразователя постоянна по величине и обратно пропорциональна произведению добротностей систем ФАП 16 и 17 по скорости. Таким образом, предлагаемый преобразователь имеет меньщую динамическую погрешность по сравнению с известным. Экономическая эффективность преобразователя определяется его техническими преимущеQ ствами.
Формула изобретения
Преобразователь угла поворота вала в 5 код, содержащий генератор и.мпульсов, подключенный к входам опорного и информационного реверсивных счетчиков и через делитель частоты к фазовращателю, выходы
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1984 |
|
SU1248068A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1280699A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1446691A2 |
| Преобразователь угла поворота вала в код | 1979 |
|
SU898482A1 |
| Преобразователь кода в угловое положение вала | 1981 |
|
SU963042A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU720452A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU734774A1 |
| Преобразователь кода в угловое положение вала | 1983 |
|
SU1088048A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1540003A2 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1076934A1 |
