I
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматического управления.
Известен способ компенсации погрешности системы дистанционной передачи угла, состоящей из дающего и принимающего сйнусно-косинусных вращающихся трансформаторов (СКВТ), основанный на включении одноименными концами синусной и косинусной обмоток дающего и принимающего СКВТ и включении резисторов в цепи синхронизации для компенсации погрешности передачи 1.
Недостатком такого способа является ограниченная точность, поскольку при компенсации не учитываются фазовые соотношения, а компенсация производится только для определенной пары дающего и принимающего СКВТ.
Наиболее близким техническим решением к данному изобретению является способ компенсации погрешности дистанционной передачи угла, состоящей из дающего и принимающего СКВТ, основанньш на определении погрешности дистанционной передачи при включении одноименными концами синусной и косинусной обмоток дающего и принимающего СКВТ, и включении индуктивных сопротивлений в цепи синхронизации 2.
Недостатком данного преобразователя является то, что компенсация производится только для конкретной пары дающего и принимающего СКВТ, что исключает взаимозаменяемость блоков в процессе эксплуатации без потери точности.
Цель изобретения - повышение точности способа компенсации.
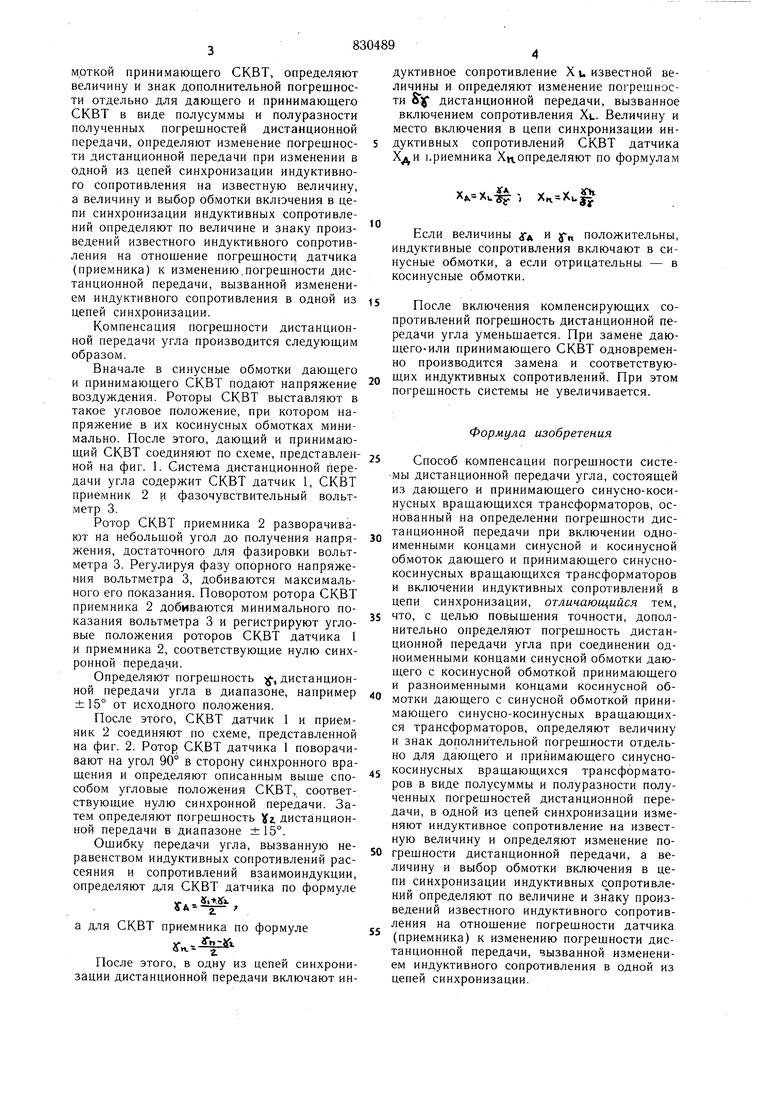
Поставленная цель достигается тем, что в способе компенсации погрещностей дистанционной передачи угла, состоящей нз дающего и принимающего СКВТ, основанном на определении погрешности дистанционной передачи при включении одноименными концами синусной и косинусной обмоток дающего и принимающего СКВТ, и включении индуктивных сопротивлений в цепи синхронизации, дополнительно определяют погрешность дистанционной передачи .угла при соединении одноименными концами синусной обмотки дающего с косинусной обмоткой принимающего и разноименными концами косинусной обмотки дающего с синусной обмоткой принимающего СКВТ, определяют величину и знак дополнительной погрешности отдельно для дающего и принимающего СКВТ в виде полусуммы и полуразности полученных погрещностей дистанционной передачи, определяют изменение погрешности дистанционной передачи при изменении в одной из цепей синхронизации индуктивного сопротивления на известную величину, а величину и выбор обмотки включения в цепи синхронизации индуктивных сопротивлений определяют по величине и знаку произведений известного индуктивного сопротивления на отношение погрешности датчика (приемника) к изменению.погрешности дистанционной передачи, вызванной изменением индуктивного сопротивления в одной из цепей синхронизации. Компенсация погрешности дистанционной передачи угла производится следующим образом. Вначале в синусные обмотки дающего и принимающего СКВТ подают напряжение воздуждения. Роторы СКВТ выставляют в такое угловое положение, при котором напряжение в их косинусных обмотках минимально. После этого, дающий и принимающий СКВТ соединяют по схеме, представленной на фиг. 1. Система дистанционной передачи угла содержит СКВТ датчик 1, СКВТ приемник 2 и фазочувствительный вольтметр 3. Ротор СКВТ приемника 2 разворачивают на небольшой угол до получения напряжения, достаточного для фазировки вольтметра 3. Регулируя фазу опорного напряжения вольтметра 3, добиваются максимального его показания. Поворотом ротора СКВТ приемника 2 добиваются минимального показания вольтметра 3 и регистрируют угловые положения роторов СКВТ датчика 1 и приемника 2, соответствующие нулю синхронной передачи. Определяют погрешность , дистанционной передачи угла в диапазоне, например :15° ОТ ИСХОДНОГО положения. После этого, СКВТ датчик 1 и приемник 2 соединяют по схеме, представленной на фиг. 2. Ротор СКВТ датчика 1 поворачивают на угол 90° в сторону синхронного вращения и определяют описанным выше способом угловые положения СКВТ, соответствующие нулю синхронной передачи. Затем определяют погрешность 1(г. дистанционной передачи в диапазоне ±15°. Ошибку передачи угла, вызванную неравенством индуктивных сопротивлений рассеяния и сопротивлений взаимоиндукции, определяют для СКВТ датчика по формуле у. . в а для СКВТ приемника по формуле Л. л После этого, в одну из цепей синхронизации дистанционной передачи включают индуктивное сопротивление X ц известной величины и определяют изменение погрешности Sjf дистанционной передачи, вызванное включением сопротивления XL. Величину и место включения в цепи синхронизации индуктивных сопротивлений СКВТ датчика ХдИ 1,риемника Хпопределяют по формулам Y V Лд-АиТЕсли величины Сд и уп положительны, индуктивные сопротивления включают в синусные обмотки, а если отрицательны - в косинусные обмотки. После включения компенсирующих сопротивлений погрещность дистанционной передачи угла уменьшается. При замене дающего-или принимающего СКВТ одновременно производится замена и соответствующих индуктивных сопротивлений. При этом погрещность системы не увеличивается. Формула изобретения Способ компенсации погрещности систе.мы дистанционной передачи угла, состоящей из дающего и принимающего синусно-косинусных вращающихся трансформаторов, основанный на определении погрешности дис -анционной передачи при включении одно .; Г.-. .. .ч именными концами синусной и косинусной обмоток дающего и принимающего синуснокосинусных вращающихся трансформаторов и включении индуктивных сопротивлений в цепи синхронизации, отличающийся тем, что, с целью повыщения точности, дополнительно определяют погрешность дистанционной передачи угла при соединении одноименными концами синусной обмотки дающего с косинусной обмоткой принимающего и разноименными концами косинусной обмотки дающего с синусной обмоткой принимающего синусно-косинусных вращающихся трансформаторов, определяют величину и знак дополнительной погрещности отдельно для дающего и принимающего синуснокосинусных вращающихся трансформаторов в виде полусуммы и полуразности полученных погрешностей дистанционной передачи, в одной из цепей синхронизации изменяют индуктивное сопротивление на известную величину и определяют изменение погрешности дистанционной передачи, а величину и выбор обмотки включения в цепи синхронизации индуктивных с опротивлений определяют по величине и знаку произведений известного индуктивного сопротивления на отношение погрешности датчика (приемника) к изменению погрешности дистанционной передачи, вызванной изменением индуктивного сопротивления в одной из цепей синхронизации. 56
Источники информации,тических устройств, «Энергия. М., 1975,
принятые во внимание при экспертизес. 95.
1. Ахметжанов А. А. Высокоточные сие-2.. «Power Apparatus and Sistems, № 46,
темы дистанционной передачи угла автома-США 1960, с. 1844 (прототип).
830489 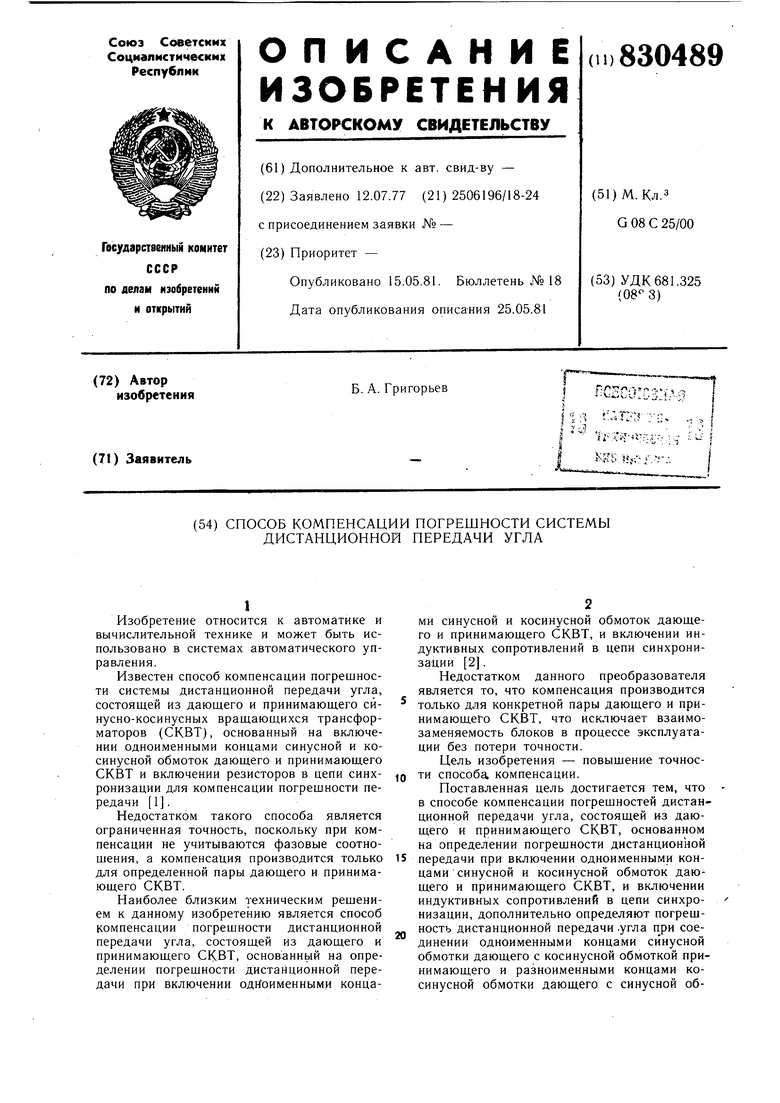
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения погрешности синусно-косинусного вращающегося трансформатора | 1976 |
|
SU657528A1 |
| Способ вторичного симметрированияСиНуСНО-КОСиНуСНОгО ВРАщАющЕгОСяТРАНСфОРМАТОРА | 1979 |
|
SU849387A1 |
| Двухотсчетный преобразователь уголкод | 1974 |
|
SU482785A1 |
| Преобразователь угла поворота валаВ КОд | 1979 |
|
SU840998A1 |
| Преобразователь угла поворота в код | 1974 |
|
SU549825A1 |
| Способ контроля погрешности вращающегося трансформатора | 1989 |
|
SU1653084A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752428A1 |
| Устройство для формирования сигнала рассогласования угловых положений валов | 1987 |
|
SU1444858A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ТРАНСЛЯЦИИ УГЛА ПОВОРОТА ВАЛА | 2006 |
|
RU2319214C1 |
| СПОСОБ ПРОВЕРКИ ПОГРЕШНОСТЕЙ ЭЛЕКТРИЧЕСКИХ | 1973 |
|
SU392589A1 |
