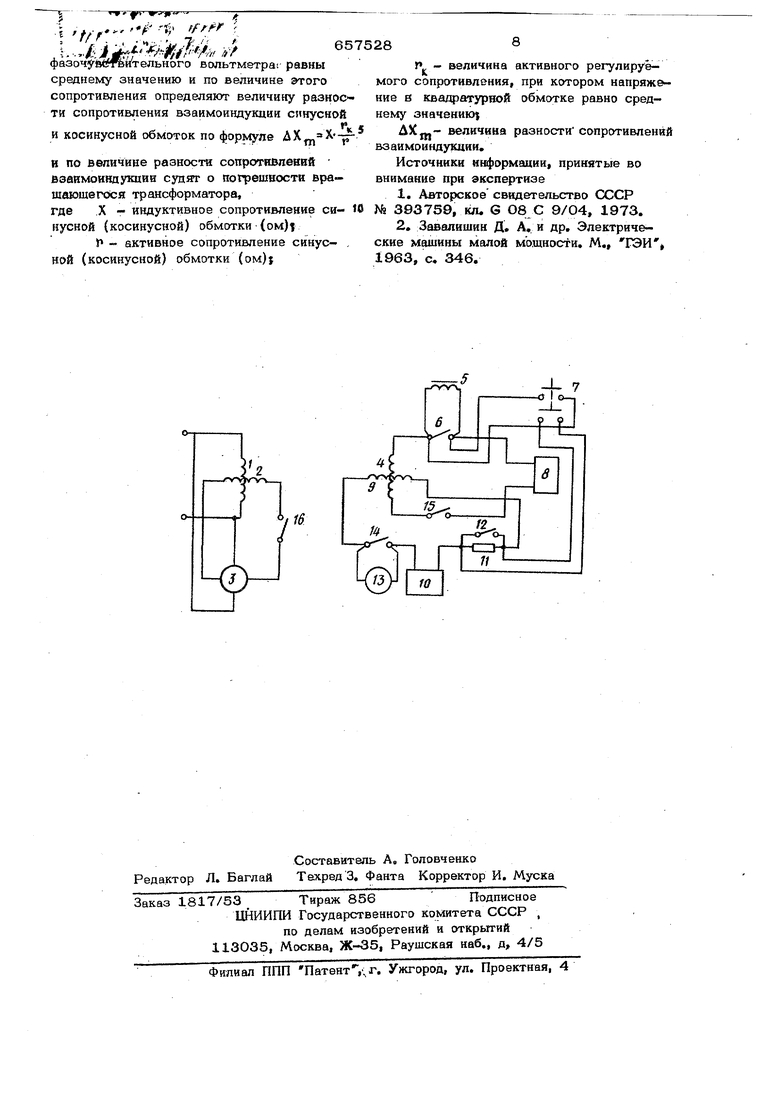
Цепью изобретения является повышение точности измерения погрешности СКВТ на основе определения величины неравенства сопротивлений взаимоиндукции обмотЬк, чт позволяет осуществлять конкретные конструктивно-технологические меры для снижэ кия влияния или полного устранения этого фактора при изготовлении СКВТ, Цель достигается тем, что до замыкания накоротко синусной и косинусной обмо ток в электрическую цепь одной из указанных обмоток включают вольтметр, размыкают другую обмотку, и, вращая ротор СКВТ добиваются минимального значения показаний вольтметра, что соответствует нулевому положению ротора СКВТ, после, закорачивания синусной и косинусной обмоток квадратурную обмотку подключают к фаЬочувствител: ному вольтметру (ФВ), на вход опорного напряжения которого подают напряжение возбуждения, разворачивают ротор СКВТ на угол 45 от его нулевого положения, включают в разрью синусной (косинусной) обмотки- индуктивное сопротивление и, периодически замыка его накоротко и одновременно регулируя фазу опорного напряжения ФВ, устанавливают такое ее значение, при котором показания ФВ остаются неизменными, после этого вращают ротор СКВТ в пределах целого оборота и замечают показания ФВ, соответствующие крайним отклонениям стрелки его показывающего прибора, и по ним вычисляют среднее значение показаний, устанавливают ротор в нулевое положение, затем, введя в разрыв синусной и косинусной обмоток регулируемое активное сопротивление, уравнивают активные сопротивления синусной и косинусной обмоток, поворачивают ротор на угол 45 от нулевого положения ротора СКВТ и, изменяя величину активного сопротивления в цепи одной из обмоток, находят такое его значение, при котором показания ФВ равны среднему значению и по величине этого сопротивления определяют разность сопротивлений взаимоиндукции синусной и ко- синусной обмоток по формуле 1ДХ Х И по величине разности сопротивлений взаимоивдукции судят о погрешности СКВ где: X - индуктивное сопротивпение синусной (косинусной) обмотки (ом), р - активное сопротивление синусной (косинусной) обмотки (ом), Г„ - величина активного регулируемого сопротивления, при котором напряже ие в квадратурной обмотке равно среднеvty значению. дх - величина, разности сопротивлеий взаимоиндукции. На чертеже приведена электрическая хема определения погрешнсхзти СКВТ. Схеа содержит обмотки возбуждения 1 и вадратурную обмотку первичного симметрирования 2, выводы последней подключены на аход фазочувствительного вольтметра (ФВ) 3, на в-ход опорного напряжения которого подано напряжение возбуждения, синусную обмотку 4, в цепь которой включены дроссель 5, который может шунтироваться постоянно выключателем 6 или периодически контактами кнопки 7, а такж безреактивный магазин сопротивлений 8j косинусную обмотку 9, в цепь которой включены безреактивный магазин сопротивлений 10, резистор 11, который может шунтироваться либо постоянно выкшоча тедем 12, либо периодически контактами кнопки 7, выход обмотки 9 подключен на вольтметр 13, который может шунтироваться выключателем 14. Проверку СКВТ начинают с определения и установки его нулевого положения, для чего размыкают вьпшючатели 15, 14, 16 и 12, выводят в нулевое положение декады магазина сопротивлений 10 и подают напряжение питания на обмотку возбуждения 1, Поворачивая ротор СКВТ по показаниям вольтметра 13, добиваются миниму ма напряжения в обмотке 9, Полученное угловое положение ротора соответствует нулю СКВТ. После этого замыкают выключатели 6, 15, 14, 16 и 12, разворачивают ротор СКВТ на угол 45 от нулевого положения (положение, соответствующее максимуму синусной составляющей кривой квад-paiypHoro напряжения) и с помощью мага зинов сопротивлений 8 и Ю компенсируют неравенство сопротивлений постоянному току синусной и косинусной обмоток. Размыкают выключатели 6 и 12 и, периодически замыкая соответствующие электрические цепи, вводят в разрыв цепей синусной и косинусной обмоток дроссель 5 и резистор 11, соответственно. Введение резистора Ц одновременно с дросселем 5,предусмотрено с целью сохранения равенства ак- rviBHbDc сопротивлений указанных обмоток, причем сопротивление резистора 11 равно активному сопротивлению дросселя 5, а величина индуктивного сопротивления дрос56селя 5 подбирается опытным путем для обеспечения необходимой чувствительности фазочувствительного вольтметра 3 при проведении операции регулировки фазы опорного напряжения. При этом одновреме но регулируют фазу опорного напрян ения фазочувствительного вольтметра 3, добиваясь, чтобы при замьпсании и размыкании кнопки 7 стрелка показываюшего прибора фазочувствительного вольтметра оставалась неподвижной,, чему соответствует совпадение фазы соответствующего вектора квадратурного напряжения, модуль которого пропорционален разности сопротивлений взаимоиндукции синусной и косинусной обмоток с обмоткой возбуждения, с фазой опорного напряжения ФВ 3, Замыкают выключатели 6 и 12 и.вращая рото СКВТ на полный оборот замечают экстремальные показания ФВ 3 и рассчитывают по ним среднее значение показаний, После установки ротора СКВТ в нулевое положение, поворачивают его,на угол 45° и включением сопротивления, набираемого на магазине 8 или 10, добиваются приведения показаний ФВ к среднему значению, определенному ранее, что соответствует компенсации до нуля синусной составляющей квадратурного напряжения, Рлзность величин сопротивлений взаимоиндукции си. нусной и косинусной обмоток определяют по формуле Д т где: X - индуктивное сопротивление синусной (косинусной) обмотки (ом), а - активное сопротивление синусной |(косинусной). обмотки (ом), Pj, - величина активного регулируемого сопротивления, при котором напряжение, измеряемое фазочувствительным фольтметром в квадратурной обмотке, равно среднему значению ДХ - величина разности сопротивлений взаимоиндукции. Величина сопротивления взаимоиндукции будет меньше на величину ДХ обмотке, к которой подключено компенсирующее сопротивление г. По величине разности сопротивлений взаимоиндукции судят о погрешности СКВТ . Использование данного способа определента погрешности СКВТ позволяет определять количественно величину одного из основных, факторов, определяющих погрешность СКВТ, а именно неравенство сопротивлений взаимоиндукции синусной и косинусной обмоток с обмоткой возбуждения 28б благодаря чему обеспечивается возможность определять конструктивно- ахниче- ские меры, направленные на устранение этого фактора, а следовательно и повыше- кия точности СКВТ. Формула изобретения Способ определения погрешности синусно-косинусного вращающегося- трансформатора, заключающийся в том; что подают напряжение питания на обмотку возбуждения, закорачивают синусную п косинусную обмотки и, вращая ротор, измеряют напря квадратурной обмотке, о т л и чающийся тем, что, с целью повышения точности измерения погрешности вращающегося трансформатора, до замыкания накоротко синусной п косинусной обмоток, в электрическую цепь одной из указанных обмоток включают вольтметр, .размыкают другую обмотку и, вращая ротор вращающегося трансформатора добиваются минимального значения показаний вольтметра, соответствует нтлевокг/ положению ротора вращающегося трансформатора, после закорачивания синусной к косинусной обмоток, квадратурную обмотку пэдключают к фазочувствптэпьному-вольтметру, на аход опорного напряжения которого подают напряжение возбуждения, развррачй- вают ротор вращаю.щегося трансформатора на угол 45 от его нулевого положения,, включают в разрью,например, синусной обмотки индуктивное сопротивление и периодически замыкая накоротко индуктивное сопротивление и одновременно ,, регулируя фазу опорного напряжения фазочувствитель- ного вольтметра, устанавливают такое ее значение, при котором показания фазочув- ствительного вольтметра остаются неизменными, после этого врашают ротор вращаю11$егося трансформатора в пределах одного оборота и замечают показания фазочувствительного вольтметра, соответствующие крайним отклонениям стрешси его показываюшего прибора, и по ним вычисляют среднее значение показаний, устанавливают ротор Б нулевое положение, затем, введя в разрьш синусной и косинусной обмоток регулируемое активное сопротивление уравнивают активньш српротивлен ия синус-1 ной и косинусной обмоток, поворачивают ротор на угол 45 от нулевого положения ротора и, изменяя в9Л гчину активного сопрот1шления в одной «з обмоток, нахо.цят такое его значение, при котором показания . b-..jfef i 4 ./65 фазочуб №ительного вольтметраг равны среднему значению и по величине этого сопротивления определяют величину разности сопротивления взаимоиндукции синусной и косинусной обмоток по ДХ и по величине разности сопротивлений взаимоиндукции судят о погрешности вращающегося трансформатора, где X - индуктивное сопротивление синусной (косинусной) обмотки (ом), - активное сопротивление синусной (косинусной) обмотки (ом)J 28 , - величина активного регулируемого сопротивления, при котором напряжение 0 квадратурной обмотке равно среднему значению} AXjjj- величина разности сопротивлений взаимоиндукции. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство CXIICP - t onHKltHlbf TBO № 393759, кл. G О8 С 9/04 1973 2. Завалишин Д. А и др. Электрич скке машины малой мощности. М., ГЭИ. 1963, с, 346.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации погрешностиСиСТЕМы диСТАНциОННОй пЕРЕдАчиуглА | 1977 |
|
SU830489A1 |
| Способ вторичного симметрированияСиНуСНО-КОСиНуСНОгО ВРАщАющЕгОСяТРАНСфОРМАТОРА | 1979 |
|
SU849387A1 |
| Устройство для представления угловой информации | 1978 |
|
SU943794A1 |
| Устройство для формирования сигнала рассогласования угловых положений валов | 1987 |
|
SU1444858A1 |
| СПОСОБ ВЗАИМНОЙ УСТАНОВКИ СИНХРОННОГО ДВИГАТЕЛЯ И СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 1994 |
|
RU2079964C1 |
| Индукционный электромашинный многополюсный двухфазный фазовращатель | 1987 |
|
SU1495942A1 |
| Двухканальный датчик угловыхпЕРЕМЕщЕНий | 1979 |
|
SU853377A2 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1734172A1 |
| Способ измерения угла поворота ротора синусно-косинусного вращающегося трансформатора | 1980 |
|
SU935820A1 |
| Устройство для измерения погрешности синусно-косинусного поворотного трансформатора | 1982 |
|
SU1056253A2 |
