(54) ЗАХВАТ ДЛЯ ГРУППЫ БОЧЕК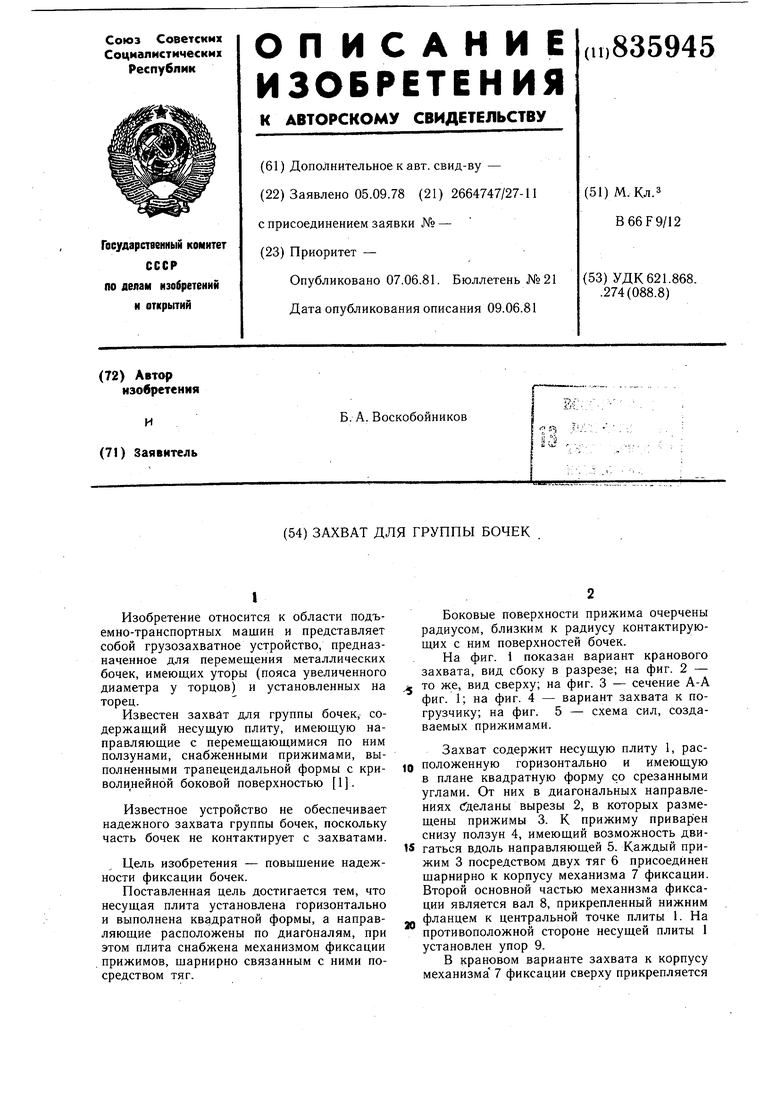

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для группы цилиндрических предметов | 1982 |
|
SU1164193A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ | 1991 |
|
RU2029728C1 |
| Захватное устройство для бочек с уторами | 1986 |
|
SU1386547A1 |
| Захват для бочек к погрузчику | 1986 |
|
SU1368259A1 |
| БОКОВОЙ ЗАХВАТ К ПОГРУЗЧИКУ | 1993 |
|
RU2081811C1 |
| Захват для деревянных бочек к погрузчику | 1981 |
|
SU983029A1 |
| ЗАХВАТ К ПОГРУЗЧИКУ ДЛЯ ДЕРЕВЯННЫХ БОЧЕК | 1971 |
|
SU307056A1 |
| ЗАХВАТ К ПОГРУЗЧИКУ ДЛЯ ДЕРЕВЯННЫХ БОЧЕК | 1968 |
|
SU220838A1 |
| Устройство для взвешивания, укупорки и маркировки бочек | 1953 |
|
SU99700A1 |
| УСТРОЙСТВО КАРУСЕЛЬНОГО ТИПА ДЛЯ МЕХАНИЧЕСКОЙ СБОРКИ БОЧЕК ИЗ КЛЕПОК | 1935 |
|
SU46033A1 |
I
Изобретение относится к области подъемно-транспортных машин и представляет собой грузозахватное устройство, предназначенное для перемещения металлических бочек, имеющих уторы (пояса увеличенного диаметра у торцов) и установленных на торец.
Известен захват для группы бочек, содержащий несущую плиту, имеющую направляющие с перемещающимися по ним ползунами, снабженными прижимами, выполненными трапецеидальной формы с криволцнейной боковой поверхностью 1.
Известное устройство не обеспечивает надежного захвата группы бочек, поскольку часть бочек не контактирует с захватами.
Цель изобретения - повыщение надежности фиксации бочек.
Поставленная цель достигается тем, что несущая плита установлена горизонтально и выполнена квадратной формы, а направляющие расположены по диагоналям, при этом плита снабжена механизмом фиксации прижимов, щарнирно связанным с ними посредством тяг.
Боковые поверхности прижима очерчены радиусом, близким к радиусу контактирующих с ним поверхностей бочек.
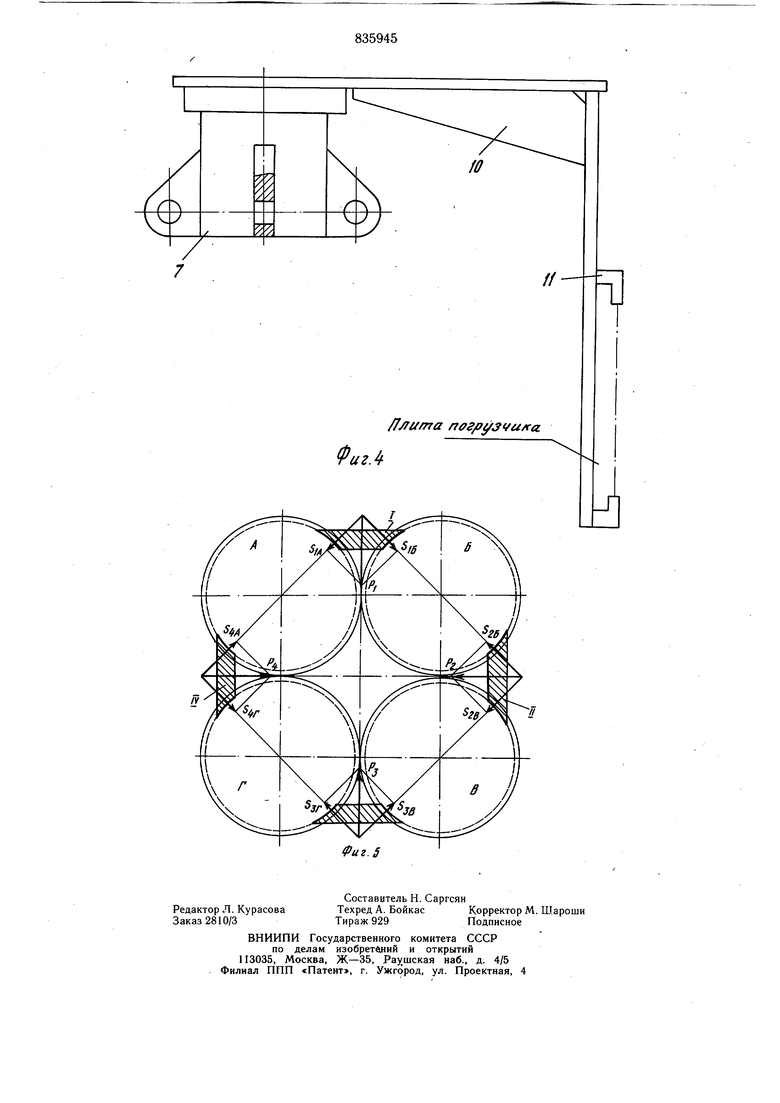
На фиг. 1 показан вариант кранового захвата, вид сбоку в разрезе; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А фиг. 1; на фиг. 4 - вариант захвата к погрузчику; на фиг. 5 - схема сил, создаваемых прижимами.
Захват содержит несущую плиту 1, расположенную горизонтально и имеющую в плане квадратную форму со срезанными углами. От них в диагональных направлениях Сделаны вырезы 2, в которых размещены прижимы 3. К прижиму приварен снизу ползун 4, имеющий возможность двигаться вдоль направляющей 5. Каждый прижим 3 посредством двух тяг 6 присоединен щарнирно к корпусу механизма 7 фиксации. Второй основной частью механизма фиксации является вал 8, прикрепленный нижним фланцем к центральной точке плиты 1. На противоположной стороне несущей плиты 1 установлен упор 9.
В крановом варианте захвата к корпусу механизма 7 фиксации сверху прикрепляется
проушина 10, в которую устанавливают такелажную скобу, надеваемую на крюк крана. В варианте захвата к погрузчику манизм 7 фиксации прикрепляют к кронштейну 11, навешиваемому на плиту погрузчика при помош,и навесного приспособления.
В обоих вариантах захват работает одинаково.
В исходном состоянии корпус механизма 7 фиксации опущен и зафиксирован в таком положении механизмом автомата. При этом тяги 6 располагаются горизонтально, а прижимы 3 занимают положение, показанное на фиг. 2 пунктиром (см. нижний прижим).
Захват в таком состоянии опускают на группу бочек до тех пор, ,пока плита 1 не ляжет на них. При этом прижимы 3 входят в пустоты между бочками. После остановки плиты 1 корпус 7 еще немного опускают, вызывая тем самым срабатывание (расцепление) механизма фиксации.
Затем производят подъем корпуса 7 краном. Плита 1 сначала остается неподвижной, а тяги 6, увеличивая свой угол наклона, вызывают перемещение всех ползунов 4, а с ними и прижимов 3 к центру плиты. Прижимы упираются в цилиндрические поверхности бочек под уторами, после чего все устройство вместе с четырьмя бочками отрывается от опоры и перемещается вверх..
После установки группы бочек на опору движение плиты 1 вниз прекращается. А корпус 7 продолжают опускать до срабатывания механизма автомата. В итоге прижимы 3 оказываются разведенными и зафиксированными в таком положении. Повторный, подъем захвата приводит к снятию его с бочек.
Формула изобретения
Захват для группы бочек, содержащий несущую плиту, имеющую направляющие с перемещающимися по ним ползунами, снабженными прижимами, выполненными трапецеидальной формы с криволинейной боковой поверхностью, отличающийся тем, что, с целью повышения надежности фиксации бочек, несущая плита установлена горизонтально и выполнена квадратной формы, а направляющие расположены по диагоналям, при этом плита снабжена механизмом фиксации прижимов, щарнирно связанным с ними посредством тяг.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 193997, кл. В 66 F 9/06, 1966 (прототип).
:):
7 /
U2.J
